THE MACHTRONICS TIẾNG VIỆT 7 MÔ HÌNH HỆ CƠ ĐIỆN TỬ
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (627.6 KB, 17 trang )
Metechvn.com
7
Mơ hình các hệ cơ điện
Francis C. Moon
Cornell University
7.1
7.2
7.3
7.4
7.5
7.6
7.7
7.8
7.9
Mở đầu ....................................................................7-1
Các mơ hình đối với các hệ cơ điện...........................7-1
Các mơ hình vật rắn .................................................7-2
Các phương trình cơ bản của động lực học các vật thể rắn
Các mơ hình động lực học đơn giản ..........................7-6
Mơ hình hệ đàn hồi...................................................7-7
Lực điện từ...............................................................7-9
Các nguyên lý động lực đối với các mạch điện và từ7-13
Định lý Earnshaw và ổn định cơ điện...................... 7-16
7-4
7.1 Mở đầu
Cơ điện tử mơ tả sự tích hợp của các yếu tố cơ khí, điện từ, và máy tính để sản xuất các thiết bị và các
hệ thống giám sát và điều khiển các hệ máy và kết cấu. Những ví dụ bao gồm các máy khách hàng quen
thuộc như VCRs, camera tự động, các túi đệm khí của ơ tô, các thiết bị tuần tra trên biển. Đặc điểm phân
biệt của các thiết bị cơ điện tử hiện đại so với các máy điều khiển trước đây là sự thu nhỏ thiết bị xử lý
thông tin điện tử. Máy tính, các cảm biến điện tử, và cơ cấu chấp hành được nhúng nhiều hơn trong kết
cấu và máy. Điều đó dẫn đến sự cần thiết đối với việc tích hợp thiết kế cơ khí và điện. Điều đó khơng
chỉ đúng đối với cảm biến và xử lý tín hiệu mà còn đối với thiết kế cơ cấu chấp hành. Trong các thiết bị
thông minh (human size) các vật liệu từ, các chất siêu dẫn mạnh hơn đã đưa đến việc thay thế các cơ cấu
chấp hành thủy lực và khí nén bằng mơ tơ servo, mơ tơ tuyến tính, và các cơ cấu chấp hành điện từ khác.
Ở thang bậc vật liệu và trong những hệ vi cơ điện (MEMS), các cơ cấu chấp hành lực tích điện, áp điện
và sắt điện (ferroelectric) đã đạt được bước tiến lớn.
trong khi các vật liệu dùng trong thiết kế cơ điện thường đổi mới thì các ngun lý đơng lực học cơ
bản của Newton và Maxwell vẫn còn áp dụng. Trong các hệ mở rộng không gian người ta phải giải các
bài toán continuum khi dùng lý thuyết đàn hồi và các phương trình vi phân đạo hàm riêng của lý thuyết
trường điện từ. Tuy nhiên, đối với nhiều ứng dụng chỉ cần dùng mơ hình tham số tập trung dựa trên i)
động lực học vật thể rắn đối với các thành phần quán tính, ii) Các định luật mạch Kirchhoff đối với các
thành phần điện tích-dịng, iii) Các định luật mạch từ đối với các thiết bị thông lượng từ.
Trong chương này, chúng ta sẽ kiểm tra những giả thiết mơ hình cơ bản về qn tính, các mạch điện
và từ, đó là các vấn đề điển hình của các hệ cơ điện tử, và sẽ tóm tắt các nguyên lý động lực học và sự
tương tác giữa chuyển động cơ học, các biến trạng thái từ và mạch. Chúng ta cũng sẽ minh họa các
nguyên lý này với một số ví dụ cũng như cung cấp một ít về lịch sử dẫn đến các tài liệu tham khảo nâng
cao trong cơ điện tử.
7.2 Các mơ hình đối với các hệ cơ điện
Các phương trình chuyển động cơ bản của mơi trường liên tục vật lý là các phương trình đạo hàm
riêng (PDEs), mô tả sự đối sử động lực học theo cả thời gian và không gian. Chẳng hạn, chuyển động
của dây đàn, dầm và bản đàn hồi, dòng chất lỏng bao quanh và chẩy qua các vật thể, cũng như các
trường điện và từ địi hỏi các thơng tin cả về không gian và thời gian. Các phương trình này gồm các
7-1
Metechvn.com
Sổ tay Cơ điện tử
phương trình đàn hồi, động lực học đàn hồi, các phương trình Navier-stokes trong cơ học chất lỏng, các
phương trình Maxwell-Faraday của điện từ. Các vấn đề trường điện từ có thể tìm thấy trong Jackson
(1968). Các vấn đề về trường kép trong các trường điện và chất lỏng có thể tìm trong Melcher (1980)
các vấn đề trong các trường từ và kết cấu đàn hồi có thể tìm trong sách chun khảo của Moon (1984).
Bài ngắn này chỉ đề cập đến các hệ rắn.
Nhiều thiết bị cơ điện thực tế có thể được mơ hình bởi các yếu tố vật lý tập trung như khối lượng
hoặc bộ tự cảm. Khi đó, các phương trình chuyển động là các dạng tích phân của PDEs cơ bản và kết
quả là các phương trình vi phân thường liên kết (ODEs). Phương pháp luận này sẽ được xem xét trong
chương này. Khi các bài tốn vật lý có phân bố khơng gian, người ta thường có thể tách bài tốn thành
phần khơng gian và phần thời gian gọi là tách biến. Mô tả không gian được biểu diễn bởi một số hữu hạn
các dạng riêng hoặc dạng không gian, mỗi dạng có biên độ dạng. Phương pháp này cũng cho kết quả
dưới dạng tập ODEs. Thông thường các phương trình liên kết này có thể được hiểu trong phạm vi của
các khối lượng cơ học tập trung đơn giản và các mạch điện và từ.
7.3 Các mơ hình vật rắn
Động học của các vật thể rắn
Động học là sự mơ tả chuyển động thơng qua các vectơ vị trí r, vận tốc v, gia tốc a, vectơ vận tốc
quay w và các tọa độ suy rộng {qk(t)}như các vị trí góc tương đối của bộ phận này đối với bộ phận khác
của máy (Hình 7.1). Trong vật thể rắn nói chung người ta chỉ rõ vectơ vị trí của một điểm như tâm khối
rc và vận tốc của điểm này vc. Vị trí góc của vật rắn được xác định bởi một bộ các góc gọi là các góc
Euler. Ví dụ, trong phương tiện giao thơng là góc gật đầu (pitch), lắc ngang (roll) và góc xoay (yaw)
(xem Moon,1999). Vectơ vận tốc góc của vật thể rắn được ký hiệu bởi w . Vận tốc của một điểm trong
vật thể rắn khác với tâm khối, rp=rc+ r , được cho bởi:
v p = vc + w ´ p
(7.1)
trong đó thành phần thứ hai là tích vectơ. Vectơ vận tốc góc w là một tính chất của vật thể rắn hồn
tồn. Nói chung, một vật thể rắn, như một vệ tinh, có sáu bậc tự do. Nhưng khi các chi tiết máy được mơ
hình như một vật thể rắn, liên kết đông học thường giới hạn số bậc tự do.
Các liên kết và các tọa độ suy rộng
Máy thường là một tập hợp chi tiết dạng vật thể rắn, trong đó mỗi bộ phận được liên kết để có một
bậc tự do đối với bộ phận bên cạnh nó. Ví dụ, trong một tay máy robot nhiều khâu cho trên hình 7.2, mỗi
khâu cứng có một bậc quay tự do. Các bậc tự do của mỗi khâu cứng bị liên kết bởi các ổ trục, thanh dẫn
và bánh răng để có một loại chuyển động tương đối. Như vậy, để thuận tiện cho việc mô tả động học
của chuyển động ta dùng các toạ độ suy rộng. {qk;k=1,…,k}
7-2
Mơ hình các hệ cơ điện tử
HÌNH 7.1 Phác họa vật thể rắn với vectơ vị trí, vận tốc và vectơ vận tốc góc
HÌNH 7.2 Tay máy robot nhiều khâu
Đơi khi, cách thuận lợi là xác định một vectơ hoặc ma trận, J(qk), được gọi là Jacobian, có quan hệ
với vận tốc của các điểm vật lý trong máy với các vận tốc suy rộng { q&k }. Nếu vectơ vị trí đối với một
điểm trong máy là rp(qk) và được xác định bởi các liên kết hình học cho bởi sự phụ thuộc hàm số của
{q k(t)}, thì vận tốc điểm này được cho bởi:
vp =
å
¶ rp
¶ qr
&
q&
r = J .q
(7.2)
trong đó tổng lấy theo số bậc tự do K. Ma trân J bậc 3xK được gọi là Jacobian và q& là vectơ Kx1 của
tọa độ suy rộng. Biểu thức này có thể được dùng để tính động năng của các bộ phận liên kết của máy, và
dùng các phương trình Lagrange được đề cập sau đây để rút ra phương trình chuyển động ( xem Moon
1999).
7-3
Sổ tay Cơ điện tử
HÌNH 7.3 Một ví dụ về động học cơ cấu
Những vấn đề động học và động lực học
Một số máy được kết cấu dưới dạng chuỗi động học kín sao cho chuyển động của một khâu xác định
chuyển động các khâu còn lại của các vật thể rắn trong chuỗi, như liên kết bốn khâu trên hình 7.3. Trong
những bài tốn này người thiết kế khơng phải giải các phương trình vi phân chuyển động. Các định luật
Newton được dùng để xác định các lực trong máy, nhưng chuyển động là động học được xác định qua
các liên kết hình học.
Trong những bài tốn liên kết hở, như thiết bị robot (hình 7.2), chuyển động của một khâu khơng xác
định động lực học các khâu cịn lại. Chuyển động của thiết bị này về bản chất là động lực học. Người kỹ
sư phải dùng cả liên kết động học (7.2) cũng như phương trình vi phân chuyển động Newton-Euler hoặc
các dạng tương đương như phương trình Lagrange được bàn đến sau.
7.4 Các phương trình cơ bản của động lực học các vật thể rắn
Trong mục này chúng ta hệ thống lại các phương trình chuyển động cho cơ học phẳng trong hệ cơ
điện tử. Mặt phẳng này có thể là hệ các vật thể rắn như trong tay máy robot chuỗi (Hình 7.2) hoặc
phương tiện giao thơng đệm từ (Hình 7.4), hoặc kết cấu mềm trong gia tốc kế MEMS. Động lực học của
hệ kết cấu mềm được mơ tả bởi các phương trình chuyển động PDEs. Phương trình đối với các vật thể
rắn tuân theo các định luật chuyển động Newton của tâm khối và mở rộng Euler của các định luật
Newton đối với mô men động lượng góc của vật thể rắn. Các phương trình này có thể phát biểu theo
nhiều cách (xem Moon, 1999):
1. Phương trình Newton - Euler (phương pháp vectơ)
2. Phương trình Lagrange (phương pháp năng lượng vơ hướng)
3. Ngun lý D’Alambert (phương pháp công ảo)
4. Nguyên lý công khả dĩ (phương trình Kane, hoặc nguyên lý Jourdan)
Phương trình Newton – Euler
Khảo sát vật thể rắn trong hình 7.1 tâm khối của nó được cho bởi vectơ rc trong hệ tọa độ cố định nào
đó. Vận tốc và gia tốc tâm khối được cho bởi
.
r&c = vc,
.
v&c = ac
(7.3)
Dấu chấm là đạo hàm toàn phần theo thời gian. Chúng ta biểu diễn tổng toàn phần các lực vectơ trên
vật thể từ cả nguồn gốc cơ học và điện từ là F.
HÌNH 7.4 Vật rắn đệm từ (Phương tiện vận tải mẫu Maglev,1998, Nagoya, Japan
7-4
Mơ hình các hệ cơ điện tử
Định luật Newton đối với chuyển động của tâm khối của vật thể có khối lượng m được cho bởi
.
(7.4)
m v&
c = F
Nếu r là một vectơ cho một điểm nào đó trong vật thể rắn, chúng ta xác định vectơ vị trí địa phương
bởi rp = rc + . Nếu một lực Fi tác động tại điểm ri trong vật thể rắn thì chúng ta xác định mơmen của lực
m đối với gốc cố định bởi
(7.5)
M i = ri ´ F
Mômen tổng bằng tổng tất cả các mômen do các lực tác dụng lên vật gây ra
M =
å
ri ´ Fi = rc ´ F + M c where M c =
å
r i ´ Fi
(7.6)
Chúng ta cũng xác định mơmen động lượng góc của vật thể rắn bởi tích của ma trận đối xứng các
mômen bậc 2 của khối lượng gọi là ma trận qn tính Ic. Vectơ mơmen động lượng góc đối với tâm khối
được xác định bởi
H c = I c .w
(7.7)
Vì Ic là ma trận đối xứng, nó có thể được chéo hóa với các qn tính chính (hoặc giá trị riêng){Iik}
đối với các phương chính (vectơ riêng) {e1, e2, e3}. Trong các toạ độ này, gắn với vật thể, mơmen động
lượng góc đối với tâm khối sẽ trở thành
H c = I 1c w1e1 + I 2c w2e2 + I 3c w3e 3
(7.8)
Trong đó vectơ vận tốc góc được viết thơng qua các vectơ riêng chính {e1, e2, e3}, gắn với vật thể rắn.
Sự mở rộng của Euler cho định luật Newton đối với vật thể rắn khi đó cho bởi
.
H&c = M c
(7.9)
Phương trình này chỉ ra rằng sự thay đổi mơmen động lượng góc đối với tâm khối bằng mômen tổng
của tất cả các lực đối với tâm khối. Phương trình này cũng có thể áp dụng đối với một điểm quay cố
định, không nhất thiết là tâm khối như trong ví dụ con lắc tổ hợp được cho dưới đây.
Các phương trình (7.4) và (7.9) được biết như là các phương trình chuyển động Newton – Euler.
Khơng có các liên kết chúng biểu diễn 6 phương trình vi phân bậc 2 liên kết đối với vị trí của tâm khối
và định hướng góc của vật thể rắn.
Động lực học nhiểu vật
Trong một chuỗi các khâu của cánh tay robot, như cho trên hình 7.2, chúng ta có một tập hợp các vật
thể rắn liên kết, mỗi vật thể chịu tác dụng của cả lực liên kết và mơmen liên kết. Các phương trình động
lực học của chuyển động bao gồm nghiệm của các phương trình Newton – Euler đối với mỗi khâu rắn
chịu liên kết hình học và động học giữa các vật thể như trong (7.2). Các lực trên mỗi vật thể được ký
hiệu bởi Fa, từ các cơ cấu chấp hành hoặc nguồn gốc cơ học bên ngoài và lực liên kết bên trong Fc. Khi
ma sát không tồn tại, công được thực hiện bởi các lực liên kết bằng 0. Tính chất này có thể được dùng để
viết các phương trình chuyển động qua các hàm năng lượng vô hướng, được biết như các phương trình
Lagrange (xem dưới đây)
Chừng nào phương pháp này được dùng để rút ra phương trình chuyển động, thì các phương trình
động lực học của chuyển động đối với các hệ nhiều vật thông qua các tọa độ suy rộng {qk(t)} có dạng
å
&
m ij q&
j +
å å
mijk q&&
j qk = Qi
(7.10)
Thành phần thứ nhất ở vế trái chứa ma trận khối lượng đối xứng suy rộng mij = mji. Thành phần thứ 2
bao gồm gia tốc Coriolis và hướng tâm. Vế phải chứa tất cả các lực và các thành phần điều khiển.
Phương trình này có tính phi tuyến bậc 2 đối với vận tốc suy rộng. Các số hạng bình phương này thường
bỏ đi đối với các bài toán vật thể rắn với trục quay đơn. Tuy nhiên, các số hạng qn tính phi tuyến nói
7-5
Sổ tay Cơ điện tử
chung xuất hiện trong các bài toán với sự quay đồng thời quanh 2 hoặc 3 trục như trong tay máy rôbốt
nhiều khâu (7.2), các bài toán con quay (gyroscope), và các bánh xe động lượng xoắn trong vệ tinh.
Trong phần mềm mô phỏng động lực học hiện đại, được gọi là mã nhiều vật, các phương trình này
được rút ra một cách tự động và được tích phân mỗi khi người sử dụng xác định hình học, lực và điều
khiển. Một số mã này được gọi là ADAMS, DADS, Working Model, và NEWEUL. Tuy nhiên người
thiết kế phải lưu ý vì các mã này đơi khi thiếu mơ hình ma sát và va chạm giữa các vật.
7.5 Các mơ hình động lực học đơn giản
Hai ví dụ ứng dụng đơn giản của định luật mơmen động lượng góc được cho sau đây. Đầu tiên là sự
quay của vật thể rắn quanh trục đơn, và thứ hai có hai trục quay.
Con lắc tổ hợp
Khi một vật chịu liên kết quay 1 bậc tự do và chịu tác dụng bởi lực trọng trường như trên hình 7.5,
phương trình chuyển động có dạng, trong đó là góc đối với trục thẳng đứng
I J - (m 1L1 - m 2L 2 )g sin q = T (t )
(7.11)
trong đó T(t) là mơmen tác dụng, I = m1L12 + m2L22 là mơmen qn tính (cịn được gọi mơmen bậc 2
của khối lượng). Phương trình trên là phi tuyến theo hàm sin của góc. Trong trường hợp chuyển động
nhỏ quanh = 0 thì phương trình trở thành phương trình vi phân tuyến tính và ta có thể tìm nghiệm dưới
dạng = Acos(t), khi T(t) = 0., Đối với trường hợp này chuyển động của con lắc có dạng hình sin với
tần số riêng
1/ 2
w = [g(m 2L 2 - m 1L1 ) / I ]
(7.12)
HÌNH 7.5 Con lắc kép chịu mơmen lực trọng trường
HÌNH 7.6 Bánh xe tầu đệm từ trên các ổ đỡ siêu dẫn nhiệt độ cao
7-6
Mơ hình các hệ cơ điện tử
Đối với con lắc đơn m1 = 0 và chúng ta có quan hệ con lắc cổ điển trong đó tần số riêng phụ thuộc
ngược vào căn bậc hai của độ dài.
w = (g / L2 )1/ 2
(7.13)
Các chuyển động Gyroscop
Thiết bị quay như các động cơ tốc độ cao trong tay máy rôbot hoặc tuốc bin trong động cơ máy bay
hay bánh xe của tầu đệm từ (H.7.6) mang mô men động lượng góc, ký hiệu bởi vectơ H. Mở rộng Euler
của các định luật Newton nói rằng sự biến thiên mơ men động lượng góc phải phù hợp với mơ men lực
M
M = H&
(7.14)
Trong các bài toán 3 chiều người ta thường có các thành phần mơ men động lượng góc quanh 2 trục
khác nhau. Điều đó dẫn đến gia tốc Coriolis sinh ra momen gyroscop ngay cả khi 2 chuyển động quay
dừng. Xét động cơ quay góc quanh một trục với vec tơ đơn vị e1 và ta hãy tưởng tượng một chuyển
động quay của trục e1 , góc y đối với trục trực giao e2 được gọi là trục tiến động theo cách nói gyroscop.
Khi đó người ta có thể chỉ ra rằng mơ men động lượng góc cho bởi:
H = I 1f e1 + I 2 y e z
(7.15)
và tốc độ biến thiên của mô men động lượng đối với sự quay không đổi và tốc độ tiến động được cho
bởi:
H&= y ez ´ H
(7.16)
HÌNH 7.7 Mơmen gyroscope trên vật thể rắn quay và tiến động
Khi đó phải tồn tại mômen gyroscope thường đựoc sinh ra bởi các lực trên các ổ đỡ của trục 1 (hình
7.7). Mơmen này vng góc với mặt phẳng tạo bởi e1 và e2 và tỉ lệ với tích của các tốc độ quay
M = I 1f y ez ´ e1
(7.17)
Phương trình này có cùng dạng như phương trình (7.10), khi lực suy rộng q được đồng nhất với
mômen M, tức là mômen là tích của các vận tốc suy rộng khi các số hạng gia tốc đạo hàm bậc 2 bằng
không.
7.6 Mô hình hệ đàn hồi
Các kết cấu đàn hồi có dạng cáp, dầm, bản, vỏ, và khung. Đối với những bài tốn tuyến tính người ta
có thể dùng phương pháp dạng riêng để biểu diễn động lực học với một tập hữu hạn các biên độ dãn đối
7-7
Sổ tay Cơ điện tử
với bậc tự do suy rộng. Các dạng riêng này tìm được như là nghiệm của các phương trình đạo hàm riêng
(PDEs) của kết cấu đàn hồi (chẳng hạn xem Yu, 1996).
Kết cấu đàn hồi đơn giản nhất sau dây cáp là dầm 1 chiều trên hình 7.8. Đối với những chuyển động
nhỏ ta giả thiết chỉ có dịch chuyển ngang w(x,t), trong đó x là tọa độ không gian dọc theo dầm. Người ta
thường giả thiết rằng ứng suất trên tiết diện ngang của dầm được tổng hợp để nhận được vectơ tổng ứng
suất trượt V, mômen uốn M và lực dọc trục T. Dầm này có thể chịu tải với lực tập trung, các lực và
mômen tại mút hoặc các lực phân bố như trong trường hợp lực trọng trường, lực chất lỏng, lực điện từ.
Đối với tải trọng phân bố ngang, f(x,t), phương trình chuyển động được cho bởi
D
¶ 4w
¶ 2w
¶ 2w
T
r
A
+
= f (x , t )
¶x4
¶x2
¶t2
(7.18)
HÌNH 7.8 Phác họa dầm đàn hồi bị ngàm
trong đó D là độ cứng chống uốn, A là diện tích tiết diện ngang của dầm và là mật độ khối lượng. Đối
với dầm có mơđun Young Y, tiết diện ngang chữ nhật với chiều rộng b chiều cao h, D = Ybh3/12. Khi
D=0 ta có dây cáp hoặc dây đàn chịu sức căng T, và phương trình có dạng phương trình sóng thơng
thường. Khi một dầm chịu lực kéo T, thì các tần số riêng tăng lên do thêm vào số hạng thứ 2 trong
phương trình này. Khi T = - P tức là có lực nén ở mút của dầm thì số hạng độ cong dẫn đến làm giảm
tần số riêng khi tăng lực nén P. Nếu tần số riêng thấp nhất tiến tới không khi tăng P thì cấu hình thẳng
của dầm trở nên mất ổn định hoặc chịu mất ổn định cong. Việc dùng T hoặc (-P) tăng hoặc giảm độ
cứng của kết cấu dầm có thể dùng trong thiết kế sensor để tạo nên một sensor với sự công hưởng biến
thiên. Ý tưởng này đã được dùng trong việc thiết kế gia tốc kế NEMs (phần sau).
Đặc điểm khác của động lực học kết cấu dầm là khác với dây đàn và dây cáp các tần số của dạng
riêng không phải là tương xứng do sự có mặt của số hạng của đạo hàm bậc 4 trong phương trình. Trong
các bài tốn sóng đó là sự phân tán sóng. Điều đó có nghĩa là các sóng ở độ dài sóng khác nhau chuyển
động với vận tốc khác nhau sao cho dạng xung của sóng biến đổi như sóng chuyển động theo kết cấu.
Để giải các bài toán động lực học trong kết cấu dầm độ dài hữu hạn người ta phải xác định các điều
kiện biên ở các mút. Các ví dụ về điều kiện biên như sau:
¶w
= 0
¶x
¶ 2w
w = 0,
= 0
¶ x2
¶ 2w
¶ 3w
= 0,
= 0
2
¶x
¶x3
w = 0,
(7.19)
Dầm áp đàn hồi (piezo-elastic)
Các vật liệu áp đàn hồi thể hiện sự liên kết giữa biến dạng và trường điện hoặc điện thế. Như vậy các
vật liệu này có thể dùng làm sensors hoặc cơ cấu chấp hành. Chúng được dùng để thu nhỏ dao động tác
dụng trong kết cấu đàn hồi, chúng cũng được phát hiện đối với ứng dụng không gian tác dụng quang
học. Nhiều vật liệu tự nhiên thể hiện tính áp đàn hồi như quartz, cũng như các vật liệu được chế tạo như
barium, titan đưa đến zirconate titan (PZT), và polyvinylidene flouride (PVDF). Không giống như lực
trong điện tích và dịng (xem ở dưới), hiệu ứng điện xảy ra theo sự biến đổi dạng của vật liệu. Mơ hình
của thiết bị này có thể thực hiện bởi biến đổi các phương trình đối với kết cấu đàn hồi.
7-8
Mơ hình các hệ cơ điện tử
Cơng trình sau đây về uốn áp điện dựa trên cơng trình của Lee và Moon (1989) cũng như tóm tắt
trong Miu (1993). Một trong những cấu hình phổ biến của senxơ-cơ cấu chấp hành piezo là uốn piezo
được chỉ ra trên hình 7.9. Dầm đàn hồi tiết diện chữ nhật như là một phần tử piezo. Phần tử piezo này co
thể liên quan đến 1 hoặc 2 cạnh của dầm trên toàn bề mặt hay một phần của bộ phận kết cấu khơng
piezo.
HÌNH 7.9 Dầm đàn hồi với hai lớp áp điện ( Lee and Moon, 1989)
Nói chung trường hai cực điện địa phương phụ thuộc vào 6 thành phần biến dạng độc lập sinh ra bởi các
ứng suất tiếp và pháp. Tuy nhiên chúng ta sẽ giả thiết rằng điện thế ngang hoặc sự phân cực liên kết với
biến dạng trục trong các lớp piezo dạng tấm. Các quan hệ cấu thành của ứng suất trục và biến dạng,T, S,
trường điện và dịch chuyển điện E 3, D3, (Không được nhầm với độ cứng chống uốn D), được cho bởi:
T 1 = c11S 1 - e 31E 3,
D 3 = e31S 1 + e3 E 3
(7.20)
Các hằng số c11, e31, e3 tương ứng là các mô đun độ cứng đàn hồi, hằng liên kết áp điện và hằng số
điện môi.
Nếu các lớp piezo được đặt trong các hướng ngược nhau như trên hình 7.9 điện thế tác dụng sẽ sinh
ra biến dạng kéo trong một lớp và biến dạng co trong lớp kia và chúng có tác dụng của mơmen trên dầm.
Các điện cực đặt vào lớp đỉnh và lớp đáy của các lớp piezo có thể có dạng sao cho có radien theo điện
thế trung bình ngang qua bề rộng dầm đối với trường hợp này các phương trình chuyển động của dầm
composite có thể viết dưới dạng
D
¶ 2V 3
¶ 4w
¶ 2w
+ r A 2 = - 2e 31z 0
4
¶x
¶t
¶ x2
(7.21)
trong đó z 0 = (hs + h p )/ 2
số hạng z là trung bình của tấm piezo và độ dầy của bán kết cấu. Khi điện thế đều thì số hạng vế phải là
kết quả tác dụng mômen tại mút của dầm tỉ lệ với điện thế ngang.
7.7 Lực điện từ
Một trong những chìa khóa để mơ hình hóa hệ cơ điện tử là sự đồng nhất hóa các lực điện và từ. Các
lực điện tác dụng trên điện tích và phân cực điện (lưỡng cực điện). Các lực từ tác dụng trên dòng điện
và phân cực từ. Điện tích và dịng điện có thể sinh ra một lực trong trường từ hoặc trường điện đều; tuy
nhiên lưỡng cực điện và từ chỉ sinh ra một lực trong gradien trường từ hoặc lực.
Các lực điện và từ cũng có thể tính được khi dùng cả phương pháp vectơ trực tiếp cũng như nguyên
lý năng lượng. Một trong các phương pháp phổ biến hơn cả là phương trình Lagrange với các hệ cơ điện
được mô tả dưới đây.
7-9
Sổ tay Cơ điện tử
HÌNH 7.10 Các lực tĩnh điện trên hai điện tích (trên), lực điện từ tác động lên một đoạn dây có dịng
điện chạy qua
Các hệ điện từ có thể được mơ hình như các đại lượng trường phân bố như trường điện E, hoặc mật
độ thông lượng từ B hoặc như các dòng từ và điện của phần tử tập trung. Lực này trên điện tích điểm Q
được cho bởi phương trình vectơ (hình 7.10).
F = QE
(7.22)
Khi E được sinh ra bởi điện tích đơn lực giữa điện tích Q1 và Q2 được cho bởi
F =
Q1Q 2
4 pe0r 2
(7.23)
và được đặt hướng dọc theo đường nối hai điện tích. Giống như các điện tích đẩy nhau và các điện tích
trái dấu hút nhau.
Các lực từ trên một đơn vị dài trên phần tử dòng I được cho bởi tích vectơ
F = I´ B
(7.24)
trong đó lực từ vng góc với mặt phẳng của phần tử dịng và vectơ trường từ. Lực tổng hợp trên mạch
đóng trong trường đều sẽ bằng khơng. Các lực lưới trên mạch đóng được sinh ra bởi gradien trường do
các mạch dòng khác hoặc trường nguồn.
Các lực sinh ra bởi phân bố trường bao quanh một điện tích chứa trong một thể tích hoặc dịng có thể
tính được khi dùng các đại lượng trường của E và B dùng trực tiếp hái niệm ứng suất từ và điện được
phát triển bởi Faraday và Maxwell. Các ứng suất điện từ này phải được tích phân trên diện tích bao
quanh điện tích hoặc phân bố dịng. Ví dụ, một vật rắn chứa một phân bố dịng có thể sinh ra áp lực từ P
= Bt2/20, trên yếu tố bề mặt và sức căng từ, tn = Bn2/20, trong đó các thành phần trường từ được viết
qua các đại lượng tiếp tuyến và pháp tuyến với bề mặt. Như vậy trường từ 1 tesla phía ngồi của vật rắn
sẽ sinh ra áp suất 40N/cm2 nếu trường này tiếp tuyến với bề mặt.
Nói chung có 4 phương pháp chính để tính các lực điện và từ
1. các vectơ lực trực tiếp và các mômen giữa các điện tích, các dịng và các lưỡng cực
2. các vectơ lực trường điện tích và trường dịng từ
3. tenxơ điện từ, tích phân của sức căng điện, áp suất từ trên bề mặt của vật thể
4. các phương pháp năng lượng dựa trên gradien của năng lượng điện và từ
7-10
Mơ hình các hệ cơ điện tử
Các ví dụ về phương pháp trực tiếp và phương pháp tenxơ ứng suất được cho dưới đây. Phương pháp
năng lượng được mô tả trong mục phương trình Lagrange.
Ví dụ 1. Các lực điện tích-điện tích
Giả sử hai dầm đàn hồi trong một thiết bị MEMS có các điện tích Q1, Q2 coulombs, mỗi một điện tích
tập trung ở điểm đầu của nó (hình 7.11)
HÌNH 7.11 Hai dầm đàn hồi với các điện tích ở đầu
Lực điện tích giữa các điện tích được cho bởi vectơ
F =
Q1Q 2r
4pe0r 3
(7.25)
Trong đó ¼0 = 8.99x109 Nm2/C2.
Nếu khoảng cách ban đầu giữa các dầm là d0, chúng ta tìm khoảng cách mới do lực điện. Để đơn giản
ta lấy Q1 = -Q2 = Q, trong đó điện tích trái dấu tạo nên lực hút giữa các mút của dầm. Sự dịch chuyển
của các dầm này được cho bởi
d=
FL3 1
= F
3Y I k
(7.26)
trong đó L là độ dài, Y là môđun Young, I là mômen bậc hai của diện tích và k là hằng số đàn hồi hiệu
dụng. Do lực điện khoảng cách mới là d = d0 – 2
kd =
Q2
1
4pe0 (d 0 - 2d)2
(7.27)
Đối với << d0 thì chúng ta có đến bậc nhất là
d=
Q 2 / 4pe0d 02k
1 - (1/ d 03 )(Q 2 / k pe0 )
(7.28)
Bài toán này chỉ ra thế năng đối với bất ổn định cong trường điện vì khi các mút dầm chuyển động
gần hơn cùng với nhau thì lực hút giữa chúng tăng lên. Biểu thức không thứ nguyên trong mẫu số
Q2 1
pe0d 03 k
(7.29)
là tỉ số độ cứng điện âm đối với độ cứng đàn hồi k của các dầm.
7-11
Sổ tay Cơ điện tử
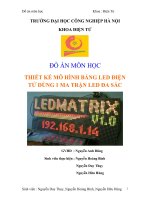
Hình 7.12 Lực trên thanh sắt từ gần một điện từ
Ví dụ 2. Lực từ trên điện từ.
Hãy tưởng tượng một khung sắt từ được giữ bằng lò xo đàn hồi độ cứng k, như chỉ ra trên hình 7.12.
Dưới khung nam châm từ mềm, ta đặt một nam châm điện sinh ra N vòng của dòng điện I bao quanh lõi
sắt từ mềm. Dòng điện được sinh ra bởi điện thế trong mạch với điện trở R.
Lực từ sẽ tính được khi dùng tensor ứng suất từ được phát triển bởi Maxwell và Faraday (xem Moon
1984, 1994). Bên ngoài một vật thể sắt từ, tensor ứng suất được cho bởi t và vectơ ứng suất trên bề mặt
xác định bởi pháp tuyến n được cho bi = t.n :
t =
ử
1 ổ1 ộ 2
ỗ B n - B t2 ù, B n B t ÷
= (t n ,t t )
ữ
ỷ
ữ
ứ
m0 ỗố2 ở
(7.30)
i vi thm từ cao như trong vật sắt từ, thành phần tiếp tuyến của trường từ ngồi bề mặt gần
bằng khơng. Như vậy lực gần vng góc với bề mặt và tìm được từ tích phân của sức căng từ trên tồn
bề mặt:
F =
1
2m0
òB
2
n
n dA
(7.31)
và Bn2/ 20 biểu diễn ứng suất căng từ. Như vậy, nếu diện tích của các mảnh cực là A (bỏ qua phần lề
của trường) thì lực là:
F = B g2A / m0
(7.32)
trong đó Br là trường có khe hở. Trường khe hở này được xác định từ luật Amper
)
N I = R F, F = B gA
(7.33)
trong đó từ trở được cho xấp xỉ bởi:
)
2(d 0 - d)
R =
m0A
(7.34)
Khi đó việc cân bằng lực từ và lực n hi c cho bi:
F =
1
f
m0A
2
2
=
1 ổNI ữ
ử
ỗ ) ữ = kd
ứ
m0A ỗố R ữ
hay
(NI )2
m0A = k d,
4(d 0 - d)2
7-12
m0N 2 I 2A
= kd
4(d 0 - d)2
(7.35)
Mơ hình các hệ cơ điện tử
(chú ý rằng biểu thức 0 N2I2 có đơn vị là lực). Một lần nữa khi dịng điện tăng, thì độ cứng đàn hồi và
độ cứng điện tiến tới khơng và người ta có thế năng mất ổn định cong.
7.8 Các nguyên lý động lực đối với các mạch điện và từ
Các phương trình cơ bản của điện từ xuất phát từ cơng trình của các nhà khoa học thế kỷ 19 như
Faraday, Henry, và Maxwell. Họ lấy dạng phương trình đạo hàm riêng qua các đại lượng về trường của
trường điện E và mật độ dòng từ B, và chứa các phép đo về lượng của mật độ điện tích, và mật độ dòng
J ( xem Jackson,1968). Tuy nhiên hầu hết các thiết bị thực tế có thể mơ hình hóa bởi mạch từ và mạch
điện tập trung. Điện trở điện dung và mạch tự cảm tiêu chuẩn chỉ ra trên hình 7.13 dùng các dịng điện I
(ampe), điện tích Q (coulomb), từ thông (weber), và điện thế V (volt) như là các biến động lực. Điện
thế là tích phân của trường điện theo một đường.
2
V 21 =
ị
E ×dl
1
(7.36)
điện tích Q là tích phân của mật độ điện tích q trên tồn bộ thể tích, và dịng điện I là tích phân của thành
phần pháp tuyến của J trên toàn bộ tiết diện. Từ thơng được cho như là tích phân mặt của luồng từ.
F =
ị B ×dA
(7.37)
HÌNH 7.13 Mạch điện với điện dung tự cảm và điện trở tập trung
Khi khơng có các thành phần cơ trong hệ các phương trình động lực học nhận dạng bảo tồn điện tích
và định luật Faraday-Henry về biến đổi dịng.
dQ
= I
dt
(7.38)
df
=V
dt
(7.39)
trong đó =n được gọi là số liên kết dòng, và n là số nguyên. Trong mạch điện từ sự tương tự của các
tính chất cơ bản của cơ học là độ tự cảm L và điện dung C. Chẳng hạn từ thông trong bộ tự cảm thường
phụ thuộc vào dòng I
f = f (I )
(7.40)
đối với bộ tự cảm tuyến tính người ta có định nghĩa về độ tự cảm L tức là =LI. Nếu hệ có biến trạng
thái cơ học như chuyển vị x, khi trong cơ cấu chấp hành nhiễm từ, thì L có thể có chức năng của x.
Trong các phần tử mạch tích lũy điện tích điện dung C được định nghĩa là
Q = CV
(7.41)
trong các thiết bị MEMS và trong microphone điện dung cũng có thể có chức năng của biến dịch chuyển
cơ học tổng quát nào đó.
7-13
Sổ tay Cơ điện tử
Các điện thế ngang qua các phần tử mạch khác nhau có thể là chủ động hoặc bị động. Một nguồn điện
thế thuần túy có thể duy trì một điện thế đã cho nhưng dịng phụ thuộc vào điện thế bị động ngang qua
phần tử mạch khác nhau và được tóm tắt trong định luât mạch của Kirchoff
d
Q
L (x )I +
+ R I = V (t )
dt
C (x )
(7.42)
Các phương trình chuyển động Lagrange đối với các hệ cơ điện
Rõ ràng rằng các phương trình chuyển động Newton-Euler đối với các hệ cơ học có thể rút ra khi
dùng nguyên lý năng lượng được gọi là phương trình Lagrange. Trong phương pháp này người ta đồng
nhất các tọa độ suy rộng {q k}, không nhầm lẫn với điện tích, và viết động năng của hệ T theo các vận
tốc và tọa độ suy rộng, T( q&k ,q k). Tiếp theo các lực cơ học được tách ra thành lực bào tồn và có thể rút ra
từ hàm thế năng W(q k) và phần còn lạic của các lực được biểu diễn bởi lực suy rộng Qk tương ứng với
công sinh ra bởi tọa độ suy rộng thứ k. Các phương trình Lagrange trong các hệ cơ học khi đó nhận dạng
¶ W (qk )
¶T
d ¶ T (q&
k , qk )
+
= Qk
dt
¶ q&
¶
q
¶ qk
k
k
(7.43)
Ví dụ trong hệ lị xo khối lượng giảm chấn tuyến tính với khối lượng m hằng số đàn hồi k, hằng số
giảm chấn nhớt c, và một tọa độ suy rộng q 1=x, phương trình chuyển động có thể rút ra khi dùng
T =
1
1
m x&2 ,n W = kx 2 , Q1 = - cx&,
2
2
trong phương trình Lagrange ở trên. Điều có thể nhận xét về các cơng
thức này là nó có thể mở rộng cho cả mạch điện từ và các bài tốn điện cơ liên kết. Như một ví dụ về
ứng dụng phương trình Lagrange cho bài tốn điện cơ liên kết, hãy xét một thiết bị cơ một chiều, trên
hình 7.14, với cơ cấu chấp hành từ và điện dung điều khiển bởi mạch điện thế tác dụng V(t). Ta có thể
mở rộng phương trình Lagrange cho các mạch bởi xác định điện tích trên điện dung, Q như tọa độ suy
rộng nữa cùng với x, tức là trong công thức Lagrange, q 1=x, q2=Q.
HÌNH 7.14 Hệ cơ điện tham số tập trung liên kêt với chuyển động cơ học một bậc tự do x(t)
Khi đó ta thêm vào hàm động năng một hàm năng lượng từ Wm( Q&, x ), và thêm vào thế năng hàm
năng lượng điện trường We(Q,x). Các phương trình này của cả khối lượng và mạch có thể suy ra từ
d ¶ [T + W m ] ¶ [T + W m ] ¶ [W + W e ]
+
= Qk
dt
¶ q&
¶ qk
¶ qk
k
(7.44)
Lực suy rộng phải được thay đổi để phù hợp với hao tán năng lượng trong bộ điện trở và năng lượng
đầu vào của điện thế tác dụng V(t), tức là Q1 = - cx&,Q 2 = - R Q&+ V (t ) . Trong ví dụ này năng lượng từ tỉ lệ
với độ tự cảm R(x), và hàm năng lượng điện tỉ lệ nghịch với điện dung C(x). Áp dụng các phương trình
Lagrange ta thu được các biểu thức đối với các lực điện và từ như là các đạo hàm của các hàm năng
lượng điện và từ tương ứng, tức là
Wm =
7-14
1
1
L (x )Q&2 = LI 2 ,
2
2
We =
1
Q2
2C (x )
(7.45)
Mơ hình các hệ cơ điện tử
Fm =
¶ W m (x ,Q&) 1 2 dL (x )
= I
,
¶x
2
dx
Fe = -
¶ W e (x ,Q )
d
1
= - Q2
¶x
2
dx
é 1 ù
ê
ú
êC (x ) ú
ë
û
(7.46)
Các cơng thức đáng chú ý này rất có lợi vì người ta có thể tính tốn các lực điện từ khi biết sự phụ
thuộc của độ tự cảm và điện dung vào dịch chuyển x. Các hàm này thường có thể tìm được từ các phép
đo điện của L và C.
Ví dụ: Lực điện trên cơ cấu chấp hành MEMS điều khiển răng lược
Hãy xét chuyển động của tấm liên kết đàn hồi giữa hai tấm cố định làm nền như trong cơ cấu chấp
hành điều khiển răng lược MEMS trên hình 7.15. Khi tấm có thể chuyển động có điện thế V tác dụng có
sự tích lũy năng lượng điện trường trong hai khe hở được cho bởi
W e* (V , x ) =
d
1
e0V 2 A 2 0 2
2
d0 - x
(7.47)
trong biểu thức này hàm năng lượng điện được viết thông qua điện thế V thay cho điện tích trên các tấm
Q như trong các phương trình 7.45 và 7.46. Khe hở ban đầu là d 0, và diện tích của tấm là A.
HÌNH 7.15 Ví dụ về lực điện trên các phần tử cơ cấu chấp hành điều khiển răng lược
HÌNH 7.16 Sự suy giảm tần số riêng của thiết bị MEMS với điện thế tác dụng như là
một ví dụ về độ cứng điện âm (từ Adams 1996)
Khi dùng các biểu thức về lực suy ra từ các phương trình Lagrange 7.44, lực điện tích trên tấm được
cho bởi
7-15
Sổ tay Cơ điện tử
Fe =
e V 2A
¶
x
W e* (V , x ) = 0
¶x
d 0 (1 - x 2 / d 2 )2
(7.48)
Biểu thức này chỉ ra rằng độ cứng điện là âm đối với x, điều đó có nghĩa là điện thế sẽ làm giảm tần
số riêng của tấm. Ý tưởng này đã được ứng dụng vào cơ cấu chấp hành điều khiển răng lược MEMS bởi
Adams (1996) trong đó điện thế được dùng để điều chỉnh tần số riêng của gia tốc kế MEMS như chỉ ra
trên hình 7.16
7.9 Định lý Earnshaw và ổn định cơ điện
Người ta vẫn chưa biết rằng các lực điện và từ trong các hệ cơ học có thể sinh ra mất ổn định tĩnh như
người ta đã biết về mất ổn định cong đàn hồi. Đó là hệ quả của tính chất bình phương ngược của các lực
điện và từ. Ta biết rằng thế năng điện từ trường thỏa mãn phương trình Laplace, 2=0. Có một định
lý cơ bản trong lý thuyết thế năng về sự khơng có thể của các giá trị cực tiểu tương đối của thế năng (r)
đối với các nghiệm của phương trình Laplace trừ trên biên. Điều đó được phát biểu trong định lý
Earnshaw (1829) rằng đối với một hệ tĩnh các điện tích, các lưỡng cực điện từ, các dịng khơng đổi
khơng thể có trạng thái ổn định của trạng thái cân bằng mà khơng có các lực động, các lực cơ học và các
lực phản hồi (chẳng hạn xem Moon 1984, 1994).
Một ví dụ của định lý Earnshaw là sự không ổn định của lưỡng cực từ (từ tình khơng đổi) gần bề mặt
sắt từ (hình 7.17). Chẳng hạn các ổ đỡ từ dựa trên các lực sắt từ cần có điều khiển phản hồi. Định lý
Earnshaw cũng suy ra rằng nếu có một bậc tự do của lực đàn hồi ổn định thì phải có một bậc tự do nữa
khơng ổn định. Như vậy các vị trí cân bằng đối với hệ điện từ thuần túy của điện tích và lưỡng cực phải
là những điểm yên ngựa. Sự liên quan của các thế năng lực là ở chỗ ma trận đạo hàm bậc hai khơng xác
định dương. Chẳng hạn giả sử có 3 tọa độ vị trí suy rộng {su} đối với tập các điện tích. Khi đó nếu lực
suy rộng tỉ lệ với gradien thế năng, , thì ma trận độ cứng điện suy rộng Kij , cho bởi
é ¶ 2Φ ù
ú
K ij = êê
ú
êë¶ si ¶ s j ú
û
sẽ khơng là xác định dương. Từ đó có nghĩa là ít nhất một giá trị riêng sẽ có độ cứng âm. Ví dụ khác về
mất ổn định cong điện tích là một dầm trong trường điện tích với điện tích sinh ra bởi trường điện tích
trên hai tấm cố định gần nhau như trên hình 7.15. Điện tích trên dầm sẽ bị hút vào hai tấm nhưng bị cản
lại bởi độ cứng đàn hồi của dầm. Khi điện thế tăng độ cứng đàn hồi và điện tổ hợp sẽ giảm cho đến khi
dầm bị mất ổn định cong về phía này hoặc phía kia. Tuy nhiên trước khi mất ổn định cong tần số riêng
của dầm đã tích điện sẽ giảm (hình 7.16). Tính chất này đã được quan sát bằng thực nghiệm trong một
thiết bị MEMS. Mất ổn định đàn hồi từ tương tự được quan sát đối với dầm đàn hồi sắt từ mỏng trong
trường từ tĩnh (xem Moon 1984). Cả hai mất ổn định đàn-từ và đàn-điện được suy ra từ cùng nguyên lý
của đinh lý Earnshaw.
HÌNH 7.17 Lực từ trên một nam châm lưỡng cực gần bán khơng gian sắt từ
vơi thể hiện lưỡng cực ảo
Có những sự ngoại lệ kịch tính đối với định lý ổn định Earnshaw. Một điều chắc chắn là sự nâng lên
của phương tiện vận tải 50 tấn trong trường từ, được biết như là MagLev, hoặc sự treo của các động cơ
7-16
Mơ hình các hệ cơ điện tử
đường ống khí khi dùng các ổ đỡ từ điều khiển phản hồi (xem Moon 1994). Ở đây hoặc là thiết bị dùng
lực phản hồi tức là các trường không phải là tĩnh hoặc là nguồn của một trong các trường từ là siêu dẫn.
Các lực nghịch từ là ngoại lệ đối với định lý Earnshaw, và các vật liệu siêu dẫn có các tính chất giống
như các vật liệu nghịch từ. Các vật liệu mới có tính chất siêu dẫn nhiệt độ cao, như YBaCuO, thể hiện
các lực quay từ thơng, điều đó có thể được dùng cho sự nâng ổn định trong ổ đỡ từ khơng có phản hồi
(xem Moon 1994).
Tài liệu tham khảo
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
Adams, S. G. (1996), Design of Electrostatic Actuators to Tune the Effective Stiffness of Micro-Mechanical Systems,
Ph.D. Dissertation, Cornell Unversity, Ithaca, New York.
Goldstein, H. (1980), Classical Mechanics, Addison-Wesley, Reading, MA.
Jackson, J. D. (1968), Classical Electrodynamics, J. Wiley & Sons, New York.
Lee, C. K. and Moon, F. C. (1989), “Laminated piezopolymer plates for bending sensors and actuators,” J. Acoust.
Soc. Am., 85(6), June 1989.
Melcher, J. R. (1981), Continuum Electrodynamics, MIT Press, Cambridge, MA.
Miu, D. K. (1993), Mechatronics, Springer-Verlag, New York.
Moon, F. C. (1984), Magneto-Solid Mechanics, J. Wiley & Sons, New York.
Moon, F. C. (1994), Superconducting Levitation, J. Wiley & Sons, New York.
Moon, F. C. (1999), Applied Dynamics, J. Wiley & Sons, New York.
Yu, Y.-Y. (1996), Vibrations of Elastic Plates, Springer-Verlag, New York.
7-17