Tổng hợp cơ cấu chính - vẽ hoạ đồ vị trí
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (193.6 KB, 24 trang )
O
2
C
B
A
n
1
O
2
S
5
b
Đồ án môn học - Nguyên lý máy Phạm Xuân Điệp - Lớp K36MA
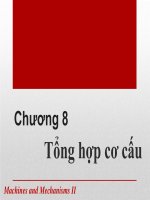
I. TỔNG HỢP CƠ CẤU CHÍNH - VẼ HOẠ ĐỒ VỊ TRÍ
1. Phân tích cấu trúc cơ cấu chính
Đây là lược đồ chính của cơ cấu Máy Bào Loại I
Cơ cấu chính của máy bào loại 1 được tổ chức từ cơ cấu culits, gồm có
6 khâu. Công dụng của máy bào là biến chuyển động quay của bộ phận dẫn
động (thường là máy điện) thành chuyển động tịnh tiến thẳng của bộ phận
công tác (đầu bào). Trên đầu bào ta lắp dao bào để bào các dạng chi tiết khác
nhau.
Đặc điểm truyền động của các khâu: Khâu dẫn O
1
A ta phải giả thiết
quay đều với vận tốc góc ω
1
truyền chuyển động cho con trượt 2 (khâu này
chuyển động song phẳng). Con trượt 2 truyền chuyển động cho culits 3 (culits
3 có chuyển động quay không toàn vòng) lắc qua lại truyền chuyển động cho
thanh truyền 4 (thanh truyền 4 chuyển động song phẳng)và thanh truyền 4
truyền chuyển động cho đầu bào 5 (đầu bào 5 có chuyển động là tịnh tiến
thẳng và khứ hồi).
2. Tính bậc tự do - Xếp loại cơ cấu
1
GVHD: Phan Quang Thế
Đồ án môn học - Nguyên lý máy Phạm Xuân Điệp - Lớp K36MA
a. Tính bậc tự do
Để tính bậc tự do ta áp dụng công thức:
W = 3n – (2P
5
+ P
4
– R + S) (1)
Ở đây n là số khâu động
P
5
là số khớp thấp loại 5
P
4
là số khớp cao loại 4
R là số ràng buộc thừa
S là số bậc tự do thừa
Ta thấy đây là cơ cấu phẳng toàn khớp thấp nên:
n = 5; P
5
= 7; P
4
= 0; R = 0; S = 0;
Vậy thay vào (1) ta tính được bậc tự do của cơ cấu chính là:
W = 3.5 – (2.7 + 0 – 0 + 0) = 15 –14 = 1
b. Xếp loại cơ cấu
Chọn khâu 1 làm khâu dẫn.Ta tách cơ cấu này thành 2 nhóm Axua:
+ Nhóm 4-5 gồm đầu bào 5 và thanh truyền 4.
+ Nhóm 2-3 gồm culits 3 và con trượt 2.
Cả 2 nhóm này đều thuộc nhóm loại 2. Vậy cơ cấu là cơ cấu loại 2.
3. Tổng hợp cơ cấu chính và vẽ hoạ đồ vị trí
a. Xác định kích thước các khâu
Theo bảng số liệu (số liệu 1):
2
GVHD: Phan Quang Thế
0,05H
Đồ án môn học - Nguyên lý máy Phạm Xuân Điệp - Lớp K36MA
H = 460 mm
k = 1,62
mml
OO
400
21
=
25,0
2
=
BO
BC
l
l
Theo lược đồ cấu tạo đã cho của cơ cấu, ta vẽ lược đồ động biểu diễn
cơ cấu ở 3 vị trí: một vị trí trung gian và hai vị trí giới hạn (vị trí biên). ở
những vị trí giới hạn, đường tâm của culits O
3
B tiếp tuyến với vòng tròn quỹ
đạo của tâm chốt tay quay. Vẽ hành trình H của đầu bào 5.
Góc lắc
221
BOB∠=
ψ
của culits 3 xác định theo hệ số về nhanh k đẫ
cho theo công thức:
000
595,42
162,1
162,1
180
1k
1k
180 ≈
+
−
=
+
−
=ψ
Vì trục đối xứng O
2
E của góc culits thẳng góc với phương chuyển động
xx của đầu bào 5 cho nên chiều dài dây cung B
1
B
2
bằng hành trình của đầu
3
GVHD: Phan Quang Thế
Đồ án môn học - Nguyên lý máy Phạm Xuân Điệp - Lớp K36MA
bào. Từ các tam giác vuông O
2
DB
1
và O
2
A
1
O
1
xác định chiều dài
BO
l
2
của
culits O
2
B và chiều dài R của tay quay O
1
A theo công thức:
mm2241,633
2
595,42
sin2
460
2
sin2
H
l
0
BO
2
≈=
ψ
=
mm284,145
2
595,42
sin400
2
sinlR
21
OO
≈⋅≈
ψ
=
Chiều dài l
BC
của thanh truyền BC bằng:
25,0
l
l
BO
BC
2
=
mm310,158241,633.25,0l25,0l
BOBC
2
≈==
Đường chuyển động xx của đầu bào đặt ở giữa đoạn biểu thị độ võng
DE của cung B
1
B
2
có bán kính O
2
B
1
(theo giả thiết). Khi đó khoảng cách
h
từ
trục xx tới tâm quay của culits:
mm618,611
2
595,42
cos1
2
241,633
2
cos1
2
l
2
2
cosll
l
2
DE
BOMOh
BO
BOBO
BO22
2
22
2
≈
+=
ψ
+=
ψ
−
−=−==
Trong bài này, khoảng chừa trước và khoảng chừa sau bằng nhau. Mỗi
khoảng ấy bằng 0,05H = 0,05 x 460 = 23 mm. Bằng phương pháp vẽ ta xác
định được các góc ứng với các khoảng chừa trong hanh trình làm việc và hành
trình về không.
Góc quay của tay quay ứng với khoảng chừa trong hành trình làm việc
là:
0''
111
'
1
7,28≈∠= AOA
θ
, còn góc ứng với khoảng chừa trước trong hành
trình về không là:
0'
111
''
1
1,24≈∠= AOA
θ
; Còn góc ứng với khoảng chừa sau
trong hành trình làm việc là:
0'
212
'
2
4,27≈∠= AOA
θ
, góc ứng với khoảng chừa
sau trong hành trình về không là :
0''
212
''
2
2,23≈∠= AOA
θ
.
4
GVHD: Phan Quang Thế
Đồ án môn học - Nguyên lý máy Phạm Xuân Điệp - Lớp K36MA
b.Vẽ hoạ đồ vị trí
Để vẽ được hoạ đồ vị trí ta chọn một tỷ xích chiều dài
L
µ
. Ta chọn
đoạn biểu diễn chiều dài tay quay
AO
1
l
là
mm50=AO
1
. Như vậy ta tính được
tỷ lệ chiều dài
mm
m
l
AO
L
0029,0
50
284,145
1
≈===
AO
diÔn biÓu o¹n§
thùc dµi é§
1
µ
BẢNG KÍCH THƯỚC VÀ BIỂU DIỄN CÁC KHÂU
THEO
mm
m
0029,0
L
=µ
.
H
AO
1
l
BO
2
l
BC
l
21
OO
l
H b
5
CS
l
Kích thước
thực (m)
0,46 0,145 0,633 0,158 0,4 0,612 0,16 0,250
đoạn biểu
diễn (mm)
158,621 50 218,358 54,590 137,931 210,903 55,172 86,207
Với cơ cấu máy bào loại một ta xác định được 11 vị trí biểu diễn hoạ
đồ chuyển vị. Vị trí các khâu trong hoạ đồ chuyển vị được xác định theo
phương pháp giao điểm.
∗ Cách dựng hoạ đồ vị trí:
Lấy một điểm O
1
bất kỳ, dựng đường tròn tâm O
1
bán kính
mmAO 50
1
=
.
Từ O
1
dựng hệ trục toạ độ O
1
xy, trên chiều âm trục O
1
y ta xác định
được O
2
với khoảng cách:
mmOO 931,137
21
=
và trên chiều dương trục O
1
y ta
lấy
mmMO 903,210
2
=
. Từ M kẻ đoạn
,
11
xx
, trên đó lấy một đoạn có độ dài
5
GVHD: Phan Quang Thế
Đồ án môn học - Nguyên lý máy Phạm Xuân Điệp - Lớp K36MA
bằng đoạn biễu diễn của hành trình H với M là trung điểm của đoạn biểu diễn
đó. Từ O
2
dựng cung tròn bán kính
BO
2
với vị trí đầu và vị trí cuối là 2 vị trí
chết tương ứng (2 vị trí tiếp xúc của culits 3 với đường tròn tâm O
1
bán kính
AO
1
).
Chia đường tròn tâm O
1
bán kính
AO
1
ra làm 8 phần bằng nhau tương
ứng với 8 vị trí, và trên đường tròn đó ta lấy thêm 3 điểm đặc biệt nữa đó là:
vị trí chết bên phải của culits 3 và 2 vị trí khi đầu bào 5 cách vị trí chết tương
ứng một khoảng 0,05H. Đánh số từ 1 đến 11 theo chiều quay của khâu dẫn
bắt đầu từ vị trí chết bên trái của culits 3.
Tương ứng với từng vị trí của khâu dẫn O
1
A ta xác định được vị trí của
culits 3. Từ B
i
ta dựng đường tròn bán kính
BC
. Đường tròn này xẽ cắt trục
,
11
xx tại 2 điểm, điểm C
i
của khâu 4 luôn là điểm nằm bên trái của đường tròn
đó.
Từ cách xác định như trên ta xác định được hoạ đồ vị trí của cơ cấu
Máy Bào Loại I.
II. ĐỘNG HỌC CƠ CẤU
1. Xác định vận tốc của các điểm ,vận tốc góc của các khâu và vẽ hoạ đồ
vận tốc
a. Xác định vận tốc của các điểm
Giả sử vẽ hoạ đồ vận tốc tại vị trí như hình dưới đây:
6
GVHD: Phan Quang Thế
Đồ án môn học - Nguyên lý máy Phạm Xuân Điệp - Lớp K36MA
(Hình vẽ)
- Vận tốc tại điểm A:
12
AA
vv
=
(do khâu 1 và khâu 2 được nối bằng khớp quay)
2323
AAAA
vvv
+=
(2)
Trong đó :
+
→
1
A
v
có chiều thuận với
1
ω
, phương vuông góc với O
1
A, và có trị số:
AO1A
11
l.v ω=
+
2
A
v
có phương vuông góc với O
1
A, chiều cùng chiều với ω
1
, có trị số:
AO1AA
112
l.vv ω==
+
3
A
v
có phương vuông góc với O
2
B, trị số chưa biết.
+
23
AA
v
có phương song song với O
2
B, trị số chưa biết.
Vậy (2) còn 2 ẩn số là trị số của
3
A
v
và trị số của
23
AA
v
. Nên (2) có thể
giải được bằng phương pháp hoạ đồ véc tơ.
- Vận tốc tại điểm B:
Biết vận tốc tại điểm A
3
dùng định lý đồng dạng ta tìm được vận tốc tại
điểm B
3
:
BO3B
23
l.v ω=
AO3A
23
l.v ω=
→
AO
BO
AB
2
2
33
l
l
.vv =
7
GVHD: Phan Quang Thế
Đồ án môn học - Nguyên lý máy Phạm Xuân Điệp - Lớp K36MA
43
BB
vv
=
(vì tại B thanh truyền 4 và culits 3 được nối với
nhau bằng 1 khớp quay).
+
3
B
v
có phương vuông góc với O
2
B, có chiều theo chiều ω
3
.
- Vận tốc tại điểm C:
54
CC
vv
=
(vì tại C thanh truyền 4 nối với đầu bào 5 bằng 1 khớp
quay).
4444
BCBC
vvv
+=
(3)
+
5
C
v
có phương song song với
,
11
xx , trị số chưa biết.
+
44
BC
v
có phương vuông góc với BC, trị số chưa biết.
Vậy phương trình (3) còn 2 ẩn là trị số của
4
C
v
và
44
BC
v
. Nên (3) có thể
giải được bằng phương pháp vẽ hoạ đồ véctơ.
Vận tốc trọng tâm S
3
của culit 3 và S
4
của thanh truyền 4 được xác định
theo định lý đồng dạng:
BO
SO
BS
l
l
vv
2
32
33
=
BC
BS
CBS
l
l
vv
4
444
=
Do đầu bào 5 chuyển động tịnh tiến theo phương ngang. Nên vận tốc
trọng tâm S
5
của đầu bào có cùng vận tốc với đầu bào:
55
CS
vv
=
Vậy hoạ đồ vận tốc cho vị trí trên như hình vẽ. Từ đó ta đi vẽ hoạ đồ
vận tốc cho 11 vị trí.
8
GVHD: Phan Quang Thế
Đồ án môn học - Nguyên lý máy Phạm Xuân Điệp - Lớp K36MA
(Hình vẽ)
b. Vẽ hoạ đồ vận tốc
Để vẽ được hoạ đồ vận tốc ta phải chọn tỉ lệ xích µ
v
:
mm.sm0304,00029,0
30
100.
30
n.
.
L
1
L1v
≈⋅
π
=µ
π
=µω=µ
Chọn điểm P bất kỳ làm gốc của hoạ đồ vận tốc.
Gọi
1
Pa
là đoạn biểu diễn vận tốc của
1
A
v
ta có:
)(50
....
11
1111
1
11
mmAO
l
Pa
PaPalv
L
AO
LvAOA
===⇒
===
µ
µωµω
Từ điểm a
1
(vì a
2
≡ a
1
) kẻ đường thẳng song song với AB và từ P kẻ
đường thẳng vuông góc với AB, giao của hai đường thẳng này là điểm a
3
. Từ
điểm P kẻ một đoạn có độ dài bằng
AO
BO
Pa
2
2
1
.
theo phương Pa
1
, ta được điểm
b
3
.
Từ điểm b
3
(vì b
4
≡ b
3
) kẻ đường thẳng vưông góc với BC và từ P kẻ
đường thẳng song song với phương ngang. Giao của hai đường thẳng này là
điểm c
4
và c
5
(vì c
4
≡ c
5
).
Hoạ đồ vận tốc của 11 vị trí được vẽ trong bản vẽ.
TRỊ SỐ CÁC ĐOẠN BIỂU DIỄN VẬN TỐC CÁC ĐIỂM
TRÊN CÁC KHÂU CỦA CƠ CẤU VỚI TỈ XÍCH µ
V
Vị trí 1 2 3 4 5 6 7 8 9 10 11
Pa
3
,
mm
0 22,304 32,069 48,148 47,688 30,7 0 2,193 21,407 42,180 40,415
Pb,
mm
0 31,896 42,553 56,701 56,384 41,16 0 3,789 42,918 98,915 93,28
9
GVHD: Phan Quang Thế