Chap2-On dinh cua cac he thong dieu khien so.pdf
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (119.97 KB, 11 trang )
Chơng 2
ổn định của hệ thống điều khiển số
Trong chơng này, chúng ta sẽ quan tâm đến một số kỹ thuật cơ bản đợc dùng để
phân tích ổn định các hệ thống điều khiển số.
Nh đã trình bày ở chơng 1, giả thiết ta có hàm truyền của hệ thống điều khiển số
vòng kín có dạng nh sau
( )
( )
( )
( )
( )
( )
1
y z G z N z
r z GH z D z
= =
+
ở đây
( )
1 0GH z+ = đợc gọi là phơng trình đặc tính. Các giá trị của z ứng với
( )
0N z = đợc gọi là không (zeros) và các giá trị của z ứng với
( )
0D z = đợc gọi là các
cực (poles). Tính ổn định của hệ thống sẽ phụ thuộc vào vị trí của các cực hay gốc của
phơng trình
( )
0D z = .
2.1. ánh xạ từ mặt phẳng p vào mặt phẳng z
Đối với các hệ vòng kín liên tục, mặt phảng p đợc sử dụng để khảo sát ổn định của hệ
thống. Tơng tự đối với các hệ thống rời rạc, mặt phẳng z đợc dùng để khảo sát ổn định của
hệ thống. Trong phần này chúng ta sẽ xét đến quan hệ tơng đơng giữa mặt phẳng p của
hệ liên tục và mặt phẳng z của hệ rời rạc.
Trớc tiên chúng ta làm một phép ánh xạ từ nửa trái của mặt phẳng p vào mặt phẳng z.
Nếu phơng trình p j
= + mô tả một điểm trong mặt phẳng p thì dọc theo trục ảo j
ta
có
pT T j T
z e e e
= = (2.1)
Vì 0
= nên
cos sin 1
j T
z e T j T T
= = + = (2.2)
Từ phơng trình (2.2), vị trí của các cực trên trục ảo của mặt phẳng p đã đợc ánh xạ
lên trên vòng tròn đơn vị của mặt phẳng z. Khi
thay đổi dọc theo trục ảo của mặt phẳng p,
góc của các cực trên vòng tròn đơn vị trong mặt phẳng z sẽ thay đổi.
Nếu
đợc giữ nguyên không đổi và tăng giá trị
ở nửa trái mặt phẳng p, thì vị trí
của các cực sẽ di chuyển về phía gốc xa khỏi vòng tròn đơn vị. Tơng tự nếu giảm giá trị
ở
nửa trái mặt phẳng p, thì các cực trong mặt phẳng z sẽ di chuyển xa ra khỏi gốc nhng vẫn
nằm trong vòng tròn đơn vị.
Qua các phân tích trên ta thấy toàn bộ nửa trái của mặt phẳng p sẽ tơng đơng với
phần bên trong của vòng tròn đơn vị trong mặt phẳng z. Tơng tự toàn bộ nửa bên phải của
mặt phẳng p sẽ tơng đơng với miền nằm bên ngoài vòng tròn đơn vị của mặt phẳng z nh
trên hình 2.1.
Nếu một hệ thống liên tục đợc coi là ổn định khi các cực nằm bên trái mặt phẳng p thì
một hệ thống rời rạc đợc coi là ổn định nếu các cực nằm bên trong vòng tròn đơn vị.
Hình 2.1. ánh xạ từ nửa trái mặt phẳng p vào bên trong vòng tròn đơn vị của mặt phẳng z
Từ mặt phẳng z chúng ta có thể phân tích ổn định của hệ thống bằng cách sử dụng
phơng trình đặc tính. Tuy nhiên phơng pháp này chỉ cho chúng ta biết hệ có ổn định hay
không mà không cho chúng ta biết hệ có ổn định hay không khi bị tác động bởi các thông
khác. Sau đây chúng ta sẽ xét một số ví dụ.
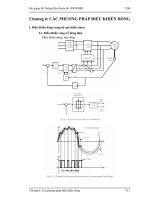
Ví dụ 2.1:
Cho một hệ thống vòng kín có sơ đồ khối nh trên hình 2.1. Xác định xem hệ có ổn
định hay không nếu chu kỳ lấy mẫu 1T s= .
Hình 2.1. Hệ thống vòng kín trong ví dụ 2.1
Lời giải:
Hàm truyền của hệ có dạng nh sau
( )
( )
( )
( )
1
y z G z
r z G z
=
+
ở đây
( )
( )
( )
( )
( )
( )
( )
2
1 1
2
2 1
1 4 4
1 1
2 2
1
T
Tp
T
z e
e
G z Z z Z z
p p p p
z z e
= = =
+ +
( )
( )
2
2
2 1
T
T
e
G z
z e
=
Với 1T s= ta có
( )
1, 729
0,135
G z
z
=
Ta có phơng trình đặc tính nh sau
j
1
Mặt phẳng p
Mặt phẳng z
1
Tp
e
p
4
2p +
( )
r p
( )
e p
( )
*
e p
( )
y p
( )
1, 729 1,594
1 1 0
0,135 0,135
z
G z
z z
+
+ = + = =
hay 1,594z = nằm ngoài vòng tròn đơn vị nên hệ không ổn định
Ví dụ 2.2:
Xác định T sao cho hệ thống trên hình 2.1 là ổn định.
Lời giải:
Từ ví dụ 2.1 ta có hàm truyền
( )
G z nh sau
( )
( )
2
2
2 1
T
T
e
G z
z e
=
Ta có phơng trình đặc tính nh sau
( )
( )
2
2
2 2
2 1
3 2
1 1 0
T
T
T T
e
z e
G z
z e z e
+
+ = + = =
hay
2
3 2
T
z e
=
Để hệ ổn định thì
2
3 2 1
T
z e
= < hay
1
2 ln
3
T
<
0,549T <
Vậy hệ ổn định nếu chu kỳ lấy mẫu 0,549T s<
2.2. Tiêu chuẩn Jury
Tiêu chuẩn Jury tơng tự nh tiêu chuẩn Routh-Hurwitz đợc sử dụng để phân tích ổn
định của các hệ liên tục. Mặc dù tiêu chuẩn Jury có thể áp dụng cho các phơng trình đặc
tính với bậc bất kỳ nhng việc sử dụng tiêu chuẩn này sẽ trở nên phức tạp khi bậc của hệ
thống là lớn.
Để mô tả tiêu chuẩn Jury, chúng ta biểu diễn phơng trình đặc tính bậc n nh sau
( )
1
1 1 0
...
n n
n n
F z a z a z a z a
= + + + + (2.3)
ở đây 0
n
a > . Từ đây ta có thể xây dựng một dãy nh bảng 2.1. Các phần tử của dãy này
đợc định nghĩa nh sau:
Các phần tử của mỗi hàng chẵn là các phần tử cuối của hàng trớc theo thứ tự ngợc
Các phần tử hàng lẻ đợc định nghĩa nh sau:
0 n k
k
n k
a a
b
a a
= ,
0 1
1
n k
k
n k
b b
c
b b
= ,
0 2
2
n k
k
n k
c c
c
c c
= , ...
Bảng 2.1. Các dãy của tiêu chuẩn Jury
0
z
1
z
2
z
...
n k
z
...
1n
z
n
z
0
a
1
a
2
a
...
n k
a
...
1n
a
n
a
n
a
1n
a
2n
a
...
k
a
...
1
a
0
a
0
b
1
b
2
b
...
n k
b
...
1n
b
1n
b
2n
b
3n
b
...
1k
b
...
0
b
0
c
1
c
2
c
...
n k
c
...
2n
c
3n
c
4n
c
...
2k
c
...
... ... ... ... ...
... ... ... ... ...
0
l
1
l
2
l
3
l
3
l
2
l
1
l
0
l
0
m
1
m
2
m
Điều kiện cần và đủ để gốc của phơng trình đặc tính nằm trong vòng tròn đơn vị là
( )
1 0F > ,
( ) ( )
1 1 0
n
F > ,
0 n
a a< (2.4)
0 1
0 2
0 1
0 2
...
...
n
n
n
b b
c c
d d
m m
>
>
>
>
(2.5)
Khi áp dụng tiêu chuẩn Jury ta thực hiện các bớc sau:
Kiểm tra ba điều kiện (2.4) và dừng nếu một trong ba điều kiện này không đợc thỏa
mãn.
Xây dựng dãy các hệ số nh bảng 2.1 và kiểm tra các điều kiện (2.5). Dừng lại nếu
một trong các điều kiện này không đợc thỏa mãn.
Tiêu chuẩn Jury sẽ trở nên phứa tạp nếu bậc của hệ thống tăng lên. Đối với các hệ
thống bậc 2 và 3 tiêu chuẩn Jury sẽ trở nên đơn giản hơn rất nhiều.
Đối với hệ bậc 2 ta có phơng trình đặc tính nh sau
( )
2 1
2 1 0
F z a z a z a= + +
Gốc của phơng trình đặc tính sẽ không nằm trên hoặc bên ngoài vòng tròn đơn vị nếu
( )
1 0F > ,
( )
1 0F > ,
0 2
a a<
Đối với hệ bậc 3 ta có phơng trình đặc tính nh sau
( )
3 2 1
3 2 1 0
F z a z a z a z a= + + + , ở đây
3
0a >
Gốc của phơng trình đặc tính sẽ không nằm trên hoặc bên ngoài vòng tròn đơn vị nếu
( )
1 0F > ,
( )
1 0F < ,
0 3
a a< ,
0 3 0 1
3 0 3 2
det det
a a a a
a a a a
>
Sau đây chúng ta sẽ xét một số ví dụ.
Ví dụ 2.3:
Cho hàm truyền của một hệ thống có dạng nh sau
( )
( )
( )
( )
1
y z G z
r z G z
=
+
ở đây
( )
2
0,2 0,5
1, 2 0, 2
z
G z
z z
+
=
+
Sử dụng tiêu chuẩn Jury để kiểm tra hệ có ổn định hay không.
Lời giải:
Phơng trình đặc tính của hệ thống có dạng nh sau
( )
2
0,2 0,5
1 1 0
1, 2 0,2
z
G z
z z
+
+ = + =
+
hay
2
0, 7 0z z + =
áp dụng tiêu chuẩn Jury ta có
( )
1 0, 7 0F = > ,
( )
1 2,7 0F = > ,
( )
( )
0 2
0,7 1a a= < =
Ví dụ 2.4:
Cho phơng trình đặc tính của một hệ thống có dạng nh sau
( )
( )
2
0, 2 0, 5
1 1 0
1, 2 0, 2
K z
G z
z z
+
+ = + =
+
Xác định giá trị của K để hệ ổn định.
Lời giải:
Phơng trình đặc tính của hệ thống là