Thí nghiệm truyện động điện ppt
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (560.83 KB, 32 trang )
BÁO CÁO THÍ NGHIỆM
ĐIỀU CHỈNH TỰ ĐỘNG TRUYỀN ĐỘNG ĐIỆN
***$$$***
BÀI THÍ NGHIỆM 1: TỔNG HỢP MẠCH VÒNG DÒNG ĐIỆN
I.TỔNG HỢP MẠCH VÒNG DÒNG ĐIỆN:
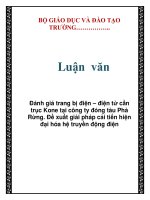
Hình 1: sơ đồ mạch vòng điêu chỉnh dòng điện
Trong đó:
u
u
u
L
T
R
=
: Hằng số thời gian điện từ của mạch phần ứng
u v k ud s
R R R R R= + + +
u b k ud
L L L L= + +
i s
K R=
: Điện trở của sensor
i s
T R C=
: Hằng số thời gian của sensor dòng điện
Viết gọn lại ta có sơ đồ như trên hình 2 ,ta có hàm truyền của đối tượng điều khiển của mạch vòng
điều chỉnh dòng điện:
Sinh viªn: Vò Thµnh Lu©n
8/2/2014
Líp : §TT – 47§H1 Trang: 1
(1 )
i
i
K
pT
+
1/
(1 )
u
u
R
pT
+
K
Φ
Κ Φ
Jp
1
K
Φ
id
U
i
U
( )
dk
U p
d
U
( )
+
( )
−
ω
( )
−
BÁO CÁO THÍ NGHIỆM
ĐIỀU CHỈNH TỰ ĐỘNG TRUYỀN ĐỘNG ĐIỆN
***$$$***
Từ sơ đồ trên hình 1 và hình 2 ta có hàm truyền của đối tượng điều khiẻn của mạch vòng điều
chỉnh dòng điện :
1
( ) . /
( ) (1 )(1 )(1 )
i cl i u
oi
dk dk u
U p K K R
S p
U p pT pT pT
( ) = =
+ + +
(1)
Trong đó:
dk
T ≈
100
sµ
,
2.5v
X ms≈ 2.5
,
u
T ms≈100
Thay
si i v dk
T T T T= + +
<<
u
T
, bỏ qua các hệ số bậc cao ta có :
. /
(1 )(1 )
cl i u
oi
si u
K K R
S p
pT pT
( ) =
+ +
(2)
Áp dụng tiêu chuẩn tối ưu môdul ta có hàm truyền của hệ thống kín như sau:
2 2
1
( )
1 2 2
oMi
F p
p p
=
+ τ + τ
(3)
Mặt khác trên hình 2 ta có:
( ).
( )
1 ( ).
i oi
oMi
i oi
R p S
F p
R p S
=
+
⇒
( )
.
oMi
i
oi oMi oi
F
R p
S F S
=
−
⇒
2 2
2 2
1
1 2 2
( )
. /
1
(1 )
(1 )(1 ) 1 2 2
i
cl i u
si u
p p
R p
K K R
pT pT p p
+ τ + τ
=
−
+ + + τ + τ
Chọn
τ
= min(
si
T
,
u
T
) =
si
T
Vậy ta có hàmh truyền của bộ điều chỉnh dòng điện :
1 .
1
( ) (1 )
2 . . . / 2. . .
u u u
i
cl i si u cl i si u
pT R T
R p
p K K T R K K T pT
+
= = +
(4)
( )
i
R p
là khâu tích phân ti lệ (PI).
Kết quả khi tổng hợp mạch vòng dòng điện bằng tiêu chuẩn tối ưu môdul ta có :
( )
oMi
F p
( )
( )
i
id
U p
U p
=
=
2 2
1
1 2 2
si si
T p T p+ +
(5)
Sinh viªn: Vò Thµnh Lu©n
8/2/2014
Líp : §TT – 47§H1 Trang: 2
i
R
oi
S
id
U
( )
−
( )I p
( )
i
U p
BÁO CÁO THÍ NGHIỆM
ĐIỀU CHỈNH TỰ ĐỘNG TRUYỀN ĐỘNG ĐIỆN
***$$$***
II.TÍNH TOÁN CÁC THÔNG SỐ CỦA HỆ TRUYỀN ĐỘNG ĐỘNG CƠ ĐIỆN 1 CHIỀU
KÍCK TỪ ĐỘC LẬP VÀ TIẾN HÀNH MÔ PHỎNG TRÊN MÁY TÍNH BẰNG PHẦN
MỀM MATLAB
CÁC THÔNG SỐ CHO TRƯỚC
dm
P
: Công suất định mức của động cơ = 1.5 KW
dm
U
: Điện áp đinh mức phần ứng = 272 V
dm
n
: Tốc đo quay định mức = 1552 v/ph
dm
η
: Hiệu suất danh định của đọng cơ = 90
%
L : Điện cảm phần ứng = 0.2H
i
T
: Hằng số thời gian máy biến dòng = 0.002 s
v
T
: Hằng số thời gian bộ chỉnh lưu = 0.0025 s
dk
T
: Hằng số thời gian mạch điều khiển mạch chỉnh lưu = 0.0001 s
T
ω
: Hằng số thời gian máy phát tốc = 0.001 s
Các phương trình phản ứng phần ứng đọng cơ điện 1 chiều:
( )
u u u u f
U E I R R= + +
u
U
: Điện áp phần ứng
u
E
: Sức điện đông phần ứng
u
R
: Điện trở mạch phần ứng
f
R
: Điện trở phụ trong mạch phần ứng
u
I
: Dòng điện trong mạch phần ứng
u u cf b ct
R r r r r= + + +
u
r
: Điện trở cuộn dây phần ứng
cf
r
: Điện trở cực từ phụ
b
r
: Điện trở cuộn bù
ct
r
: Điện trở tiếp xúc chổi than
.
2
u
pN
E K
a
= Φ ω = .Φ.ω
π
p : số đôi cực
N : số thanh dẫn tác dụng của cuộn dây phấn ứng
Φ
: từ thông
ω
:tốc độ góc
2
pN
K
a
=
π
hệ số cấu tạo của động cơ
. .
u e
E K n = Φ
n : tốc độ rôto
2
60 9,55
n nπ
ω = =
(6)
Sinh viªn: Vò Thµnh Lu©n
8/2/2014
Líp : §TT – 47§H1 Trang: 3
BÁO CÁO THÍ NGHIỆM
ĐIỀU CHỈNH TỰ ĐỘNG TRUYỀN ĐỘNG ĐIỆN
***$$$***
dm
ω
=
rad/s162
55.9
1552
55.9
==
dm
n
(7)
e
K
=
9,55
K
= 0.105K (8)
Phương trình đặc tính cơ điện :
2
(
u f
u
u
R R
U
I
K K
+
ω = −
Φ Φ)
Phương trình đặc tính cơ :
2
(
u f
u
R R
U
M
K K
+
ω = −
Φ Φ)
(9)
Trong đó :
dt
u
M
I
K
=
Φ
dt
M
=
co
M
= M
Tính mômen định mức:
.
dm dm dm
P M= ω
⇒
dm
dm
dm
P
M =
ω
=
Nm 58.9
162
1552
=
⇒
dm
dm
dm
P
I
U
=
=
A 71.5
272
1552
=
(10)
⇒
dm
dm
M
K
I
Φ =
=
7.1
71.5
58.9
=
(11)
Tính gần đúng
u
R
theo cong thức :
0,5(1 )
dm
u dm
dm
U
R
I
= −η
=
3.2
95.5
272
)9,01(5.0 Ω=−
u b k ud
L L L L= + +
= 0.2H
⇒
u
u
u
L
T
R
=
: Hằng số thời gian phần ứng
⇒
u
T =
s 0,087
3.2
2.0
=
(12)
Từ sơ đồ cấu trúc hệ điều khiển tốc độ trên hình 2-3 ta có:
.
dm cl dk
U K U=
Chọn
dk
U
= 10V ta có :
cl
K
=
dm
dk
U
U
=
27
10
272
=
(13)
Sinh viªn: Vò Thµnh Lu©n
8/2/2014
Líp : §TT – 47§H1 Trang: 4
BÁO CÁO THÍ NGHIỆM
ĐIỀU CHỈNH TỰ ĐỘNG TRUYỀN ĐỘNG ĐIỆN
***$$$***
Hàm truyền của bộ điều chỉnh dòng điện :
.
1
(1 )
2. . .
u u
i
cl i si u
R T
R
K K T pT
= +
(14)
si i v dk
T T T T= + +
=0.002+0.0025+0.0001=4.6*
3
10
−
s
u
T
=0.087 s
u
R
=2.3 Ω
cl
K
=27
Chọn
id
U
= 7V
id
i
dm
U
K
I
=
=
23.1
71.5
7
=
(15)
⇒
i
R =
)
p*087.0
1
1( 655.0)
p*087.0
1
1(
10*6.4*23.1*27*2
087.0*3.2
3
+=+
−
(16)
2
(
u
c
JR
T
K
=
Φ)
=
2
)7.1(
3.2*45.2
=2 s (17)
2
(
u
c
R
T KΦ)
=
6765.0
2*7.1
3.2
=
(18)
Sơ đồ mô phỏng mạch vòng dòng điện có thể dùng mô hình sau:
Với step có thể như sau:
Sinh viªn: Vò Thµnh Lu©n
8/2/2014
Líp : §TT – 47§H1 Trang: 5
BÁO CÁO THÍ NGHIỆM
ĐIỀU CHỈNH TỰ ĐỘNG TRUYỀN ĐỘNG ĐIỆN
***$$$***
BÀI THÍ NGHIỆM 2: TỔNG HỢP MẠCH VÒNG TỐC ĐỘ
Sinh viªn: Vò Thµnh Lu©n
8/2/2014
Líp : §TT – 47§H1 Trang: 6
BÁO CÁO THÍ NGHIỆM
ĐIỀU CHỈNH TỰ ĐỘNG TRUYỀN ĐỘNG ĐIỆN
***$$$***
Kết quả khi tổng hợp mạch vòng dong điện bằng tiêu chuẩn môdul tối ưu ta có:
( )
oMi
F p
( )
( )
i
id
U p
U p
=
=
2 2
1
1 2 2
si si
T p T p+ +
(19)
Vậy sơ đồ cấu trúc của hệ diieù chỉnh tốc đọ còn lai như tren hình 3, trong đó ta lấy hàm truyền đạt
của mạch vòng dòng điện là khâu quán tính bậc nhất, bỏ qua các bậc cao.
Hình 3 : Sơ đồ cấu trúc hệ điều chỉnh tốc độ
I.TỔNG HỢP MẠCH VÒNG TỐC ĐỘ:
Viết gọn sơ đồ hình 2-3 ta có sơ đồ mạch vòng điều chỉnh tốc độ như hình 2-4 :
( ) (1 )
u
o
i c s
R K
S p
K K T pT
ω
ω
ω
( ) =
Φ +
(20)
Với :
2
s i s
T T T T
ω ω ω
= + →
rất nhỏ
Áp dụng tiêu chuẩn môdul tối ưu:
Sinh viªn: Vò Thµnh Lu©n
8/2/2014
Líp : §TT – 47§H1 Trang: 7
R
ω
1
1 2 )
si
T p
+
( ).
u
c
R
K T p
Φ
1 )
K
T p
ω
ω
+
d
U
ω
U
ω
( )
−
( )
i
U p
ω
id
U
R
ω
o
S
ω
d
U
ω
( )U p
ω
p
ω ( )
( )
−
BÁO CÁO THÍ NGHIỆM
ĐIỀU CHỈNH TỰ ĐỘNG TRUYỀN ĐỘNG ĐIỆN
***$$$***
Hình 4
2 2
1
( )
1 2 2
OM
F p
p p
ω
=
+ τ + τ
(21)
( )
.
oM
o oM o
F
R p
S F S
ω
ω
ω ω ω
=
−
2 2
2 2
1
1 2 2
( )
.
1
(1 )
.( ). (1 ) 1 2 2
u
i c s
p p
R p
R K
K K T p T p p
ω
ω
ω
+ τ + τ
=
−
Φ + + τ + τ
1
( )
.
.2 (1 )
.( ). (1 )
u
i c s
R p
R K
p p
K K T p T
ω
ω
ω
=
τ + τ
Φ +
Chọn
τ
=
s
T
ω
ta có:
(
( )
. .2.
i c
u s
K K T
R p
R K T
ω
ω ω
Φ)
=
(22)
Vậy khâu này là khâu tỉ lệ (P)
Tiêu chuẩn này được sử dụng khi hê thống khởi động đã mang tải,lúc đó ta không coi
c
T
là nhiều
nữa.
Áp dụng tiêu chuẩn tối ưu đói xứng môdul :
2 2 3 3
1 4
( )
1 4 8 8
ODx
p
F p
p p p
+ τ
=
+ τ + τ + τ
(23)
( )
.
oMi
o oMi
F
R p
S F S
ω
ω
ω ω
=
−
⇒
2 2 3 3
2 2 3 3
1 4
1 4 8 8
( )
.
1 4
(1 )
.( ). (1 ) 1 4 8 8
u
i c s
p
p p p
R p
R K
p
K K pT pT p p p
ω
ω
ω
+ τ
+ τ + τ + τ
=
+ τ
−
Φ + + τ + τ + τ
Chọn
ω
τ
=
s
T
ω
ta có:
2 2
1 4
( )
.
.8
.( )
s
u
i c
T p
R p
R K
p
K K T
ω
ω
ω
+
=
τ
Φ
(24)
Vậy
R
ω
lá khâu tỉ lệ,tích phân (PI).
Đó lá khâu vô sai cấp 2 đối với đại lưọng đặt và vô sai cấp 1 đối với đại lượng nhiễu
c
I
.
Sau khi tổng hợp ra các bộ điều chỉnh , ta có sơ đồ cấu trúc của hệ thống điều khiển tốc độ động cơ
điện 1 chiều như hình 5
Sinh viªn: Vò Thµnh Lu©n
8/2/2014
Líp : §TT – 47§H1 Trang: 8
BÁO CÁO THÍ NGHIỆM
ĐIỀU CHỈNH TỰ ĐỘNG TRUYỀN ĐỘNG ĐIỆN
***$$$***
Hình 5 : Sơ đồ cấu trúc hệ truyền động T-Đ
II.TÍNH TOÁN CÁC THÔNG SỐ CỦA HỆ TRUYẾN ĐỘNG ĐỘNG CƠ MỘT CHIỀU
KÍCH TỪ MỘT CHIỀUVÀ MÔ PHỎNG TRÊN MÁY TÍNH BẰNG PHẦN MẾM
MATLAB
Cũng trên hình 3 ta có:
.
d
U K
ω ω
= ω
Chọn :
d
U
ω
=
10V
⇒
K
ω
=
062.0
162
10
=
(25)
Trong công thức (2-14) ta có :
2
s si
T T
ω ω
Τ = +
Với
sω
Τ
=1ms ,
si
T
=4,6.
3
10
−
s
c
T
=
2
( )
u
JR
KΦ
=
2
7.1
3.2*45.2
=2 s (26)
⇒
T
ϖ
S
=10
3−
+4.6*10
3−
=5.6*10
-3
s
Khi tổng hợp mạch vòng tôc độ theo tiêu chuẩn môdul tối ưu ta có:
.( ).
( )
. .2
i c
u s
K K T
R p
R K
ω
ω ω
Φ
=
Τ
=
3
10*6.5*2*062.0*6.2
2*7.1*23.1
−
=2316 (27)
( ).
u
c
R
K TΦ
=
2*7.1
3.2
=0.6765 (28)
Khi tổng hợp mạch vòng tốc độ theo tiêu chuẩn môdul đối xứng ta có:
2
.
( )
.
.8.
.( ).
s
u
s
i c
p
R p
R K
p
K K T
ω
ω
ω
ω
1+ 4Τ
=
Τ
Φ
(Khâu PI)
Sinh viªn: Vò Thµnh Lu©n
8/2/2014
Líp : §TT – 47§H1 Trang: 9
R
ω
1
1 2
si
T p
+
i
K
1
( ).
u
c
R
K T p
Φ
1 )
K
T p
ω
ω
+
d
U
ω
( )U p
ω
( )
−
( )
i
U p
p
ω ( )
BÁO CÁO THÍ NGHIỆM
ĐIỀU CHỈNH TỰ ĐỘNG TRUYỀN ĐỘNG ĐIỆN
***$$$***
⇒
2339
*10*855.0
1
*10*855.0
*02.01
*)10*6.5(*8*
2*7.1*23.1
062.0*3.2
*10*6.5*41
)(
55
23
3
+=
+
=
+
=
−−
−
−
pp
p
p
p
pR
ω
Mô phỏng hệ điều khiển tốc đọ khi dùng Simulink
a) Bộ điều chỉnh tốc đọ tổng hợp theo tiêu chuẩn môdul đối xứng(PI)
Sơ đồ mô phỏng tốc độ khi tổng hợp theo phương pháp môdul đối xứng sử dụng bộ điều chỉnh
tương tự PI
Trong đó Tốc độ đặt được khai báo:
Sinh viªn: Vò Thµnh Lu©n
8/2/2014
Líp : §TT – 47§H1 Trang: 10
BÁO CÁO THÍ NGHIỆM
ĐIỀU CHỈNH TỰ ĐỘNG TRUYỀN ĐỘNG ĐIỆN
***$$$***
PID được khai báo:
Khi đó:
U điều khiển:
Sinh viªn: Vò Thµnh Lu©n
8/2/2014
Líp : §TT – 47§H1 Trang: 11
BÁO CÁO THÍ NGHIỆM
ĐIỀU CHỈNH TỰ ĐỘNG TRUYỀN ĐỘNG ĐIỆN
***$$$***
Dòng điện:
Sinh viªn: Vò Thµnh Lu©n
8/2/2014
Líp : §TT – 47§H1 Trang: 12
BÁO CÁO THÍ NGHIỆM
ĐIỀU CHỈNH TỰ ĐỘNG TRUYỀN ĐỘNG ĐIỆN
***$$$***
Tốc độ
Tốc độ 1:
Sinh viªn: Vò Thµnh Lu©n
8/2/2014
Líp : §TT – 47§H1 Trang: 13
BÁO CÁO THÍ NGHIỆM
ĐIỀU CHỈNH TỰ ĐỘNG TRUYỀN ĐỘNG ĐIỆN
***$$$***
b)Khi tổng hợp theo phương pháp modul tối ưu
Trong đó tốc độ đặt được khai báo giống như trên.
Khi đó:
U điều khiển:
Sinh viªn: Vò Thµnh Lu©n
8/2/2014
Líp : §TT – 47§H1 Trang: 14
BÁO CÁO THÍ NGHIỆM
ĐIỀU CHỈNH TỰ ĐỘNG TRUYỀN ĐỘNG ĐIỆN
***$$$***
Dòng tải:
Dòng điện:
Sinh viªn: Vò Thµnh Lu©n
8/2/2014
Líp : §TT – 47§H1 Trang: 15
BÁO CÁO THÍ NGHIỆM
ĐIỀU CHỈNH TỰ ĐỘNG TRUYỀN ĐỘNG ĐIỆN
***$$$***
Tốc độ:
Sinh viªn: Vò Thµnh Lu©n
8/2/2014
Líp : §TT – 47§H1 Trang: 16
BÁO CÁO THÍ NGHIỆM
ĐIỀU CHỈNH TỰ ĐỘNG TRUYỀN ĐỘNG ĐIỆN
***$$$***
Tốc độ 1:
BÀI THÍ NGHIỆM 3:TỔNG HỢP MẠCH VÒNG VỊ TRÍ
I.Tổng hợp mạch vòng vị trí:
Sơ đồ cấu trúc của hệ điều khiển vị trí:
Sinh viªn: Vò Thµnh Lu©n
8/2/2014
Líp : §TT – 47§H1 Trang: 17
BÁO CÁO THÍ NGHIỆM
ĐIỀU CHỈNH TỰ ĐỘNG TRUYỀN ĐỘNG ĐIỆN
***$$$***
2
) 1 1
.
( ) 1 2 2
d s s
p
p T p T p K
ω ω ω
ω(
=
ω + +
: Khi tổng hợp mạch vòng tốc độ theo tiêu chuẩn môdul tối ưu
2 2 3 3
) 1 1
.
( ) 1 4 8 8 .
d s s s
p
p T p T p T p K
ω ω ω
ω(
=
ω + + + ω
: Khi tổng hợp mạch vòng tốc độ theo tiêu chuẩn
môdul đối xứng
Ta có sơ đồ cấu trúc như sau :
Sinh viªn: Vò Thµnh Lu©n
8/2/2014
Líp : §TT – 47§H1 Trang: 18
R
ω
1
1 2
si
T p
+
i
K
1
( ).
u
c
R
K T p
Φ
1
K
T p
ω
ω
+
R
ϕ
1
Jp
1
K
T p
ϕ
ϕ
+
( )
−
( )
−
d
ϕ
d
U
ω
U
ω
id
U
ϕ
id
U
R
ϕ
2
2 2 3 3
) 1 1
.
( ) 1 2 2
) 1 1
.
( ) 1 4 8 8 .
d s s
d s s s
p
p T p T p K
p
p T p T p T p K
ω ω ω
ω ω ω
ω(
=
ω + +
ω(
=
ω + + + ω
r
K
p
d
ϕ
1
K
T p
ϕ
ϕ
+
(-)
ϕ
BÁO CÁO THÍ NGHIỆM
ĐIỀU CHỈNH TỰ ĐỘNG TRUYỀN ĐỘNG ĐIỆN
***$$$***
Trong đó
r
K
=
1
i
: Hệ số khuyêch đại của bộ truyền lực
2
s si
T T
ω ω
Τ = +
=
s
T
ω
+ 2(
dk v i
T T T+ +
)
Tổng hợp mạch vòng vị trí cũng tương tự như tổng hợp mạch vòng tốc độ, ta dùng tiêu chuẩn tối
ưu môdul và hàm truyến đạt của mạch vòng tốc độ lấy là khâu bậc 2 bỏ qua các khâu bậc
cao.Vậy :
) 1 1
.
( ) 1 2
d s
p
p T p K
ω ω
ω(
=
ω +
: Khi tổng hợp theo tiêu chuẩn môdul tối ưu
) 1 1
.
( ) 1 4 .
d s
p
p T p K
ω
ω(
=
ω + ω
: Khi tổng hợp theo tiêu chuẩn môdul đối xứng
1)Nếu tổng hợp mạch vòng tôc độ theo tieu chuẩn môdul tối ưu ta cos hàm truyền của đối tượng
. / .
(1 2 ). .(1 )
r
s
K K K
S
T p P pT
ϕ
οϕ
ω ϕ
ω
=
+ +
Áp dụng tiêu chuẩn môdul tối ưu ta có:
Hình 6
1
( )
.
1
.2
.(1 2 ) 1
( ) .
.
. .2 . .
r
s
D
s
D
r r
R p
K K
p
p
K T p T
R p K K p
K K T
K K
K K T K K T
ω
ϕ
ω ω ϕ
ϕ ϕ
ω ω ω
ϕ
ϕ ϕ ϕ ϕ
=
+ τ
τ
+ +
= +
= =
Chọn
τ
=
T
ϕ
ta có :
( ) .
D
R p K K p
ϕ ϕ
= +
Với :
. .2
r
K
K
K K T
ω
ϕ
ϕ ϕ
=
và
.
. .
s
D
r
K T
K
K K T
ω ω
ϕ ϕ
=
R
ϕ
là khâu tỉ lệ đạo hàm PD
2)Khi tổng hợp mạch vòng tốc độ dùng tiêu chuẩn tối ưu đối xứng ta có hàm truyền của đối tượng
Sinh viªn: Vò Thµnh Lu©n
8/2/2014
Líp : §TT – 47§H1 Trang: 19
R
ϕ
S
ϕ
U
ω
ω
U
ω
BÁO CÁO THÍ NGHIỆM
ĐIỀU CHỈNH TỰ ĐỘNG TRUYỀN ĐỘNG ĐIỆN
***$$$***
. / .
(1 4 ). .(1 )
r
s
K K K
S
T p P pT
ϕ
οϕ
ω ϕ
ω
=
+ +
.Áp dụng tiêu chuẩn tối ưu môdul ta có:
Chọn
τ
=
s
T
ω
ta có :
.(1 4 )
. .2
s
r
K
K T p
K K T
ω
ϕ ω
ϕ ϕ
= +
.Đây là khâu tỷ lệ đạo hàm
II.TÍNH TOÁN CÁC THÔNG SỐ CỦA HỆ TRUYẾN ĐỘNG ĐỘNG CƠ MỘT
CHIỀU KÍCH TỪ MỘT CHIỀUVÀ MÔ PHỎNG TRÊN MÁY TÍNH BẰNG
PHẦN MẾM MATLAB
Ta có :
. 2 . .l r n r= ϕ = π
: Chiều dài quãng đường cần di chuyển = 100 (m)
r : Bán kính trục truyền tải cuối cùng = 0.32 (cm)
T
ϕ
: Hằng số thời gian bộ cảm biến vi trí = 0.3 (s)
1
2
n
r
= =
π
2
10*32.0*2
100
−
Π
= 497 (vòng)
1
r
ϕ =
=
2
π
n = 2
Π
*497=994
Π
(rad)
Tín hiệu xác định vị trí đặt phải xấp xỉ tín hiệu phản hòi tức là:
d
K U
ϕ ϕ
ϕ =
⇒
K
ϕ
=
Π994
10
=3.2*10
-3
r
K
: Hệ số khuyếch đại của bọ truyền lực
0
. .
t
r r
K dt K tϕ = ω = ω.
∫
⇒
r
K
t
ϕ
= =
ω.
2*162
314
=0.97
Bộ điều chỉnh vị trí :
(1 2 )
. .2
s
r
K
R T p
K K T
ω
ϕ ω
ϕ ϕ
= +
R
ϕ
=
)*01.01(33)*10*6.5*21(
3.0*2*10*2.3*97.0
062.0
3
3
pp +=+
−
−
(Khi mạch vòng tốc độ tổng hợp theo tiêu chuẩn môdul tối ưu)
R
ϕ
=
)*02.01(33)*10*6.5*41(
3.0*2*10*2.3*97.0
062.0
3
4
pp +=+
−
−
(Khi mạch vòng tốc độ tổng hợp theo tiêu chuẩn môdul đối xứng)
Mô phỏng hệ điều khiển vị trí khi dùng Simulink
Sinh viªn: Vò Thµnh Lu©n
8/2/2014
Líp : §TT – 47§H1 Trang: 20
BÁO CÁO THÍ NGHIỆM
ĐIỀU CHỈNH TỰ ĐỘNG TRUYỀN ĐỘNG ĐIỆN
***$$$***
a)Bộ điều chỉnh vị trí tổng hợp theo tiêu chuẩn tối ưu(khi mạch vòng tốc độ tổng hợp theo tiêu
chuẩn môdul đối xứng)
Trong đó bộ điều chỉnh tốc độ (PID) được khai báo:
Bộ điều chỉnh vị trí được khai báo như sau:
Tốc độ đặt:
Sinh viªn: Vò Thµnh Lu©n
8/2/2014
Líp : §TT – 47§H1 Trang: 21
BÁO CÁO THÍ NGHIỆM
ĐIỀU CHỈNH TỰ ĐỘNG TRUYỀN ĐỘNG ĐIỆN
***$$$***
Khi đó:
U điều khiển:
Sinh viªn: Vò Thµnh Lu©n
8/2/2014
Líp : §TT – 47§H1 Trang: 22
BÁO CÁO THÍ NGHIỆM
ĐIỀU CHỈNH TỰ ĐỘNG TRUYỀN ĐỘNG ĐIỆN
***$$$***
Dòng tải:
Sinh viªn: Vò Thµnh Lu©n
8/2/2014
Líp : §TT – 47§H1 Trang: 23
BÁO CÁO THÍ NGHIỆM
ĐIỀU CHỈNH TỰ ĐỘNG TRUYỀN ĐỘNG ĐIỆN
***$$$***
DÒng điện:
Tốc độ:
Sinh viªn: Vò Thµnh Lu©n
8/2/2014
Líp : §TT – 47§H1 Trang: 24
BÁO CÁO THÍ NGHIỆM
ĐIỀU CHỈNH TỰ ĐỘNG TRUYỀN ĐỘNG ĐIỆN
***$$$***
Tốc độ 1:
Vị trí:
Sinh viªn: Vò Thµnh Lu©n
8/2/2014
Líp : §TT – 47§H1 Trang: 25