ĐỒ ÁN TRUYỀN ĐỘNG ĐIỆN ĐỘNG CƠ 1 CHIỀU ( ĐẠI HỌC BÁCH KHOA)
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (2.99 MB, 47 trang )
Đồ án môn học: Điều khiển truyền động điện
GVHD: Lê Tiến Dũng
TRƯỜNG ĐẠI HỌC BÁCH KHOA
KHOA ĐIỆN
BỘ MÔN TỰ ĐỘNG HỐ
ĐỒ ÁN MƠN HỌC
ĐIỀU KHIỂN TRUYỀN ĐỘNG ĐIỆN
CHUN NGÀNH:
KỸ THUẬT ĐIỀU KHIỂN VÀ TỰ ĐỘNG HÓA
Sinh viên thực hiện:
Số thẻ sinh viên
: 105170368
Nhóm HP/ Lớp
: 17Nh33B / 17TDH2
Giảng viên hướng dẫn : PGS.TS LÊ TIẾN DŨNG
Đà Nẵng, tháng …… năm 20….
Trang 1
Đồ án môn học: Điều khiển truyền động điện
GVHD: Lê Tiến Dũng
MỤC LỤC
CHƯƠNG 1: GIỚI THIỆU BÀI TỐN, TÍNH TỐN THIẾT KẾ PHẦN
ĐỘNG LỰC
1.1
Giới thiệu bài tốn …………………………………………...…6
1.2
Phân tích u cầu của hệ truyền động điện……………………..7
1.2.1
Phân tích yêu cầu bài toán………………………………………7
1.2.2
Cấu trúc chung của một hệ truyền động điện …………………..7
1.3
Quy đổi tải về trục động cơ…………………………………….8
1.3.1
Phân tích yêu cầu của tải ……………………………………….8
1.3.2
Quy đổi các đại lượng cơ học…………………………………...9
1.4
Tính chọn cơng suất động cơ……………………………………12
1.5
Tổng hợp đặc tính tải yêu cầu…………………………………...13
1.6
Lựa chọn động cơ và hộp số…………………………………….14
1.7
Thông số bộ biến đổi công suất…………………………………17
1.7.1
Xác định yêu cầu của hệ truyền động điện…………………...…17
1.7.2
Lựa chọn bộ biến đổi cơng suất ………………………………..17
1.7.3
Tính chọn Thyristor cho bộ biến đổi cơng suất…………………18
1.8
Tính chọn các cảm biến…………………………………………19
1.8.1
Tính chọn cảm biến tốc độ………………………………………19
1.8.2
Tính chọn cảm biến dịng điện………………………………….20
1.9
Lựa chọn thiết bị bảo vệ…………………………………………21
1.9.1
Lựa chon aptomat………………………………………………..21
1.9.2
Lựa chon cầu chì………………………………………………. 21
1.10
Lựa chọn bộ điều khiển ………………………………………..22
CHƯƠNG 2: MƠ HÌNH HĨA HỆ THỐNG TRUYỀN ĐỘNG ĐIỆN
2.1
Mơ hình tốn học tổng qt của hệ thống ….…………………..24
2.2
Xây dựng mơ hình tốn học động cơ 1 chiểu KTDL ………….24
2.3
Mơ hình tốn học các khâu trong hệ thống ……………………28
2.3.1
Mơ hình tốn học của bộ chỉnh lưu cầu 3 pha có điều khiển ….28
Trang 2
Đồ án môn học: Điều khiển truyền động điện
GVHD: Lê Tiến Dũng
2.3.2
Mơ hình tốn học của cảm biến ………………………………..31
2.4
Xây dựng mơ hình tốn học của hệ thống
………………….32
CHƯƠNG 3: TỔNG HỢP HỆ THỐNG TRUYỀN ĐỘNG ĐIỆN
3.1.
Tổng hợp mạch vòng dòng điện……………………………….31
3.2
Tổng hợp mạch vịng tốc độ
……………………………….37
CHƯƠNG 4:MƠ PHỎNG, KIỂM NGHIỆM VÀ ĐÁNH GIÁ CHẤT
LƯỢNG
4.1.
Mơ hình mơ phỏng trên Matlab ………………………………..40
4.1.1
Sơ đồ tổng thể hệ thống truyền động …………………………40
4.1.2
Thông số của động cơ một chiều kích từ độc lập
4.1.3
Thơng số bộ điều khiển của hệ thống …………………………41
4.1.4
Khối điều khiển công suất ………………………………………41
4.1.5
Khâu tạo tín hiệu đặt tốc độ ……………………………………..42
4.1.6
Khâu tạo tín hiệu momen ………………………………………..42
4.2
Kết quả mô phỏng và đánh giá ………………………………….43
4.2.1
Tốc độ của động cơ ……………………………………………..43
4.2.2
Momen của động cơ ……………………………………………43
4.2.3
Dòng điện của động cơ …………………………………………44
4.2.4
Đồ thị của động cơ sau giảm tốc ……………………………….44
Trang 3
……………40
Đồ án môn học: Điều khiển truyền động điện
GVHD: Lê Tiến Dũng
DANH MỤC HÌNH ẢNH VÀ BẢNG
Hình 1.1
Sơ đồ hệ thống truyển động điện
………………………….6
Hình 1.2
Sơ đồ tốc độ mong muốn của tải
………………………….6
Hình 1.3
Cấu trúc chung của hệ thống
Hình 1.4
Đồ thị tốc độ động cơ
………………………………………..10
Hình 1.5
Đồ thị momen phụ tải
………………………………………..11
Hình 1.6
Đồ thị cơng suất động cơ ………………………………………..12
Hình 1.7
Sơ đồ bốn góc phần tư
…………………………………7
………………………………………..14
Hình 1.8
Động cơ 148867 RE 40 Ø40 mm, Graphite Brushes, 150
Watt…15
Bảng 1.1 Thơng
số
của
………………………………………...15
động
Bảng 1.2 Thơng
số
của
………………………………………...16
hộp
cơ
số
Hình 1.9 Tốc độ u cầu của động cơ khi gắn giảm tốc
……………..16
Hình 1.10 Momen
của động
…………………………..17
cơ
khi
gắn
giảm
tốc
Hình 1.11
Mạch chỉnh lưu cầu 3 pha gồm 2 bộ mắc song
song ngược……...18
Hình 1.12 Thyristor
………………………………………...19
Hình 1.13 Cảm
biến
tốc
………………………………………...20
Trang 4
40TPS12A
độ
HA25
Đồ án mơn học: Điều khiển truyền động điện
Hình 1.14 Cảm
biến
…………………………..20
GVHD: Lê Tiến Dũng
dịng
điện
HST21-50A
Hình 1.15
Aptomat
CHIINT
…………………………………21
NXB-63-C63
Hình 1.16
Cầu
chì
R015-5A
…………………………………22
của
CNYJ
Hình 1.17 Sơ
đồ
khối
của
………………………………………..22
hệ
thống
Bảng 1.3 Thơng số các
……………………23
trong
hệ
thành
phần
Hình 2.1 Mơ
hình
tổng
qt
…………………………………24
Bảng 2.1 Danh sách các
…………………………..24
Hình 2.2 Mơ hình tốn
……………………26
Hình 2.3 Sơ đồ khối
……………………27
khối
học
mơ
của
có
của
hình
trong
động
truyền
hệ
cơ
đạt
thống
thống
hệ
thống
một
chiều
động
cơ
Hình 2.4 Hàm truyền động cơ sau khi thay các hệ số
……………………28
Hình 2.5 Bộ chỉnh lưu cầu 3 pha kép có điều khiển
……………………29
Hình 2.6 Đồ thị điện
……………………30
áp
sử
dụng
ngun
lý
arcos
Hình 2.7 Mơ hình tốn học bộ biến đổi chỉnh lưu cầu 3 pha
……………..31
Hình 2.8 Mơ hình tổng
……………………32
qt
từ
Hình 2.9 Mơ
hình
tốn
học
…………………………………33
Trang 5
tốc
của
độ
mong
hệ
muốn
thống
Đồ án môn học: Điều khiển truyền động điện
GVHD: Lê Tiến Dũng
Hình 3.1 Tổng
hợp
mạch
…………………………34
vịng
Hình 3.2 Sơ đồ mạch
…………………..35
điều
vịng
Hình 3.3 Mạch
vịng
dịng
………………………….36
Hình 3.4 Mơ
hình
mạch
………………………….37
dịng
khiển
điện
vịng
sau
dịng
Hình 3.5 Mạch
vịng
………………………………………………37
thể
mơ
Hình 4.3 Thơng
số
điều
…………………………..41
khiển
Hình 4.4 Khối điều khiển
…………………………..41
bộ
Hình 4.6 Tín
hiệu
momen
…………………………..42
Hình 4.8 Momen
của
động
…………………………..43
Hình 4.10 Dịng
điện
đặt
…………………………………44
Trang 6
xấp
xỉ
độ
xỉ
hệ
và
vào
thống
cơ
hệ
đổi
theo
và
cơ
điện
của
theo
Hình 4.7 Tốc
độ
động
cơ
…………………………………43
xỉ
động
độ
độ
xấp
của
biến
Hình 4.5 Tín
hiệu
đặt
tốc
…………………………..42
điện
khi
xấp
phỏng
Hình 4.2 Thơng
số
của
………………………………………...40
dịng
tốc
Hình 3.6 Mạch
vịng
tốc
độ
………………………………………..38
Hình 4.1 Sơ đơ tổng
……………………40
điện
thống
cơng
suất
thời
gian
thời
gian
tốc
độ
momen
động
đặt
tải
cơ
Đồ án môn học: Điều khiển truyền động điện
GVHD: Lê Tiến Dũng
Hình 4.11 Tốc độ động cơ sau giảm tốc và tốc độ yêu cầu
…………….44
Hình 4.12 Momen động cơ sau giảm tốc và momen động cơ yêu
cầu ……..45
CHƯƠNG 1: GIỚI THIỆU BÀI TỐN, TÍNH TỐN THIẾT KẾ
PHẦN ĐỘNG LỰC
1.1 Giới thiệu bài tốn:
Hình 1.1: Sơ đồ hệ thống truyền động điện.
Cơ cấu công tác bao gồm 1 băng tải được cố định bởi 2 bánh đà có bán
kính r = 0.15m. Một bánh đà đóng vai trị là rịng rọc, một bánh đà được nối với
trục động cơ. Ta sử dụng một động cơ một chiều kích từ độc lập để nối vào trục
bánh đà. Khi làm việc động cơ sẽ tạo ra một momen làm quay bánh đà làm băng
tải quay theo, chiều quay của động cơ cùng chiều với di chuyển của băng tải.
Trên băng tải ta đặt một vật M có khối lượng là 4kg, mục tiêu của bài toán là
điều khiển tốc động động cơ để tốc độ băng tải để có được tốc độ đúng như
mong muốn. Nguồn điện cung cấp cho hệ theo như yêu cầu đề bài là nguồn điện
3 pha 220V/ 380V. Sơ đồ tổng quát của hệ truyền động điện được mơ tả như
trên hình 1.1.
Tốc độ u cầu của hệ như sau bao gồm các giai đoạn: Tăng tốc, ổn định
vận tốc, giảm tốc, đảo chiều.
Trang 7
Đồ án môn học: Điều khiển truyền động điện
GVHD: Lê Tiến Dũng
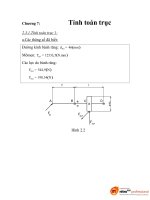
Hình 1.2:
Sơ đồ tốc độ mong muốn của tải.
1.2 Phân tích các yêu cầu của hệ truyền động điện:
1.2.1 Yêu câu bài toán:
Mục tiêu của bài toán là ta phải thiết kế một hệ truyền động điện hoàn
chỉnh bao gôm các thành phần động cơ, bộ biến đổi, bộ điều khiển, cảm biến tốc
độ, cảm biến dòng điện…tạo thành một hệ kín. Ta phải xác định được tốc độ
của băng tải với tải M trên đó rồi đưa các giá trị này về bộ điều khiển kết hợp
với các thuật tốn điều khiển để điều khiển góc mở các van công suất của bộ
biến đổi công suất. Đảm bảo việc tính chọn các linh kiện trong hệ thống phù
hợp với u cầu bài tốn, đảm bảo tính ổn định, chính xác.
Việc thiết kế bộ điều khiển và các thuật tốn đóng vai trị quan trọng
trong việc điều khiển động cơ chạy đúng với giá trị mong muốn, bám theo
những giá trị đặt. Nguyên lý hoạt động như sau: Bộ điều khiển sẽ lấy giá trị từ
các cảm biến, so sánh với giá trị mong muốn, từ đó xử lí áp dụng các thuật toán
để điều khiển bộ biến đổi công suất để động cơ đáp ứng được những giá trị
mong muốn trong thời gian ngắn nhất, bộ điều khiển có khả năng tự điều chỉnh
khi tải có sự thay đổi hay những nhiễu đặt vào hệ thống. Các bước xây dựng bộ
điều khiển bao gồm: Xác định cấu trúc bộ điều khiển, xây dựng thuật tốn, tính
tốn các tham số, mơ phỏng và chỉnh định.
Vì vậy việc chọn lựa các chi tiết phần cứng và thiết kế phần mềm điều
khiển hệ thống có mối liên hệ chặt chẽ với nhau. Với mục đích cuối cùng là
đảm bảo hệ ổn định, đạt chất lượng cao và đáp ứng tốt yêu cầu của bài toán.
1.2.2 Cấu trúc chung của hệ truyền động điện:
Về cấu trúc, sơ đồ tổng thể của hệ thống (hình 1.3) bao gồm các khâu:
Trang 8
Đồ án môn học: Điều khiển truyền động điện
GVHD: Lê Tiến Dũng
Hình 1.3: Cấu trúc chung của hệ thống.
- Nguồn điện: Theo như yêu cầu đề bài thì nguồn cung cấp cho mạch là nguồn
điện 3 xoay chiều ba pha 220/380.
- Động cơ điện 1 chiều: Biến đổi điện năng thành cơ năng. Hoạt động trên
nguồn điện một chiều. Cuộn kích từ độc lập với cuộn dây phần ứng.
- Bộ biến đổi: bao gồm các van công suất được điều khiển bởi bộ điều khiển có
nhiệm vụ biến đổi nguồn điện xoay chiều thành nguồn 1 chiều cung cấp cho
động cơ với điện áp đặt vào động cơ có thể thay đổi được.
- Bộ điều khiển (controller): Khối điều khiển, là các thiết bị dùng để điều khiển
bộ biến đổi. Khối điều khiển bao gồm các cơ cấu nhận dữ liệu đo lường, các bộ
điều chỉnh tham số và thuật tốn điều khiển.
- Cảm biến dịng điện và encoder: Đóng vai trị là các cảm biến, lấy các thơng
số về dòng điện phần ứng và tốc độ động cơ để đưa về bộ điều khiển.
Một hệ thống truyền động điện được gọi là hệ hở khi khơng có phản hồi, và
được gọi là hệ kín khi có phản hồi, nghĩa là giá trị của đại lượng đầu ra được
đưa trở lại đầu vào dưới dạng một tín hiệu nào đó để điều chỉnh lại việc điều
khiển sao cho đại lượng đầu ra đạt giá trị mong muốn.
Với yêu cầu đề bài như trên, cần lựa chọn các phần tử của hệ thống sao cho
phù hợp.
1.3 Quy đổi tải về trục động cơ:
Trang 9
Đồ án môn học: Điều khiển truyền động điện
GVHD: Lê Tiến Dũng
1.3.1.Phân tích yêu cầu của tải:
Một hệ truyền động điện bao gồm có phần cơ khí. Nó bao gồm các phần tử
chuyển động từ rotor động cơ cho đến cơ cấu sản xuất. Mỗi cơ cấu của truyền
động đều có các đại lượng ω, M, v, F, J.
Để dễ dàng cho việc nghiên cứu và tính tốn, người ta thường tính quy đổi tất
cả các đại lượng đó về trục động cơ. Ngun tắc của tính tốn quy đổi là đảm
bảo năng lượng của hệ trước và sau quy đổi là không thay đổi.
Tốc độ của bẳng tải được mơ tả như trên hình 1.2.
Trong đó có 6 giai đoạn:
Giai đoạn 1: từ thời điểm 0s đến 1s thì tốc độ băng tải tăng theo
chiều thuận từ 0 đến 5m/s.
Giai đoạn 2: thời điểm 1s đến 3s thì tốc độ băng tải giữ nguyên
5m/s.
Giai đoạn 3: thời điểm 3s đến 3.5s thì tốc độ băng tải giảm về 0m/s
Giai đoạn 4: thời điểm 3.5s đến 4s thì động cơ quay với chiều
nghịch tốc độ băng tải tăng lên 5m/s
Giai đoạn 5: thời điểm 4s đến 6s thì tốc độ băng tải giữ nguyên
5m/s.
Giai đoạn 6: thời điểm 6s đến 7s thì tốc độ băng tải giảm về 0m/s.
Nguồn điện cung cấp ở đây là nguồn điện xoay chiều 3 pha 220V/380V
mà động cơ của chúng ta sử dụng là động cơ điện một chiều nên chúng ta phải
sử dụng bộ biến đổi phù hợp.
Hệ thống phải hoạt động ổn định, sai số nằm trong khoảng cho phép, dễ
dàng điều khiển.
1.3.2. Tính tốn quy đổi các đại lượng cơ học:
a) Quy đổi tốc độ dài của băng tải về tốc độ góc của động cơ:
Ta có cơng thức chuyển đổi tốc độ dài và tốc độ góc:
Vbt = r. => =
(1.1)
Trong đó:
Vbt : Tốc độ của băng tải (m/s).
: Tốc độ của trục động cơ (rad/s).
r : Bán kính bánh đà của băng tải (m).
Trang 10
Đồ án môn học: Điều khiển truyền động điện
GVHD: Lê Tiến Dũng
Từ sơ đồ của tốc độ băng tải mong muốn (Hình 1.2) ta quy đổi về tốc độ các
thời điểm trên trục động cơ:
Tại thời điểm 0s, 3.5s, 7s:
= 0 (rad/s)
Tại thời điểm 1s , 3s, 4s, 6s:
=
Ta có đồ thị tốc độ góc trên trục động cơ:
40
33.33
33.33
30
20
�(rad/s)
10
0
0
0
0
1
2
3
0
4
5
6
-10
-20
-30
-33.33
-33.33
-40
t(s)
Hình 1.4 Đồ thị tốc độ động cơ
b) Quy đổi momen về trục động cơ:
Ta có cơng thức tính momen yêu cầu từ động cơ:
Tem = Jm + r2M + r.fL (1.2)
Bỏ qua momen quán tính Jm và lực cản fL, ta có:
T =r2M
Tại thời điểm từ 0s đến 1s:
Trang 11
(1.3)
7
8
Đồ án môn học: Điều khiển truyền động điện
GVHD: Lê Tiến Dũng
Tại thời điểm từ 1s đến 3s:
Tại thời điểm từ 3s đến 3.5s:
Tại thời điểm từ 3.5s đến 4s:
Tại thời điểm từ 4s đến 6s:
Tại thời điểm từ 6s đến 7s:
Từ các kết quả, ta có đồ thì momen của phụ tải (hình 1.5).
4
3
3
3
3
0
0
6
7
2
T (N.m)
0
0
0
1
2
0
0
3
4
-6
-6
5
-2
-4
-6
-8
t (s)
Hình 1.5 Đồ thị momen phụ tải.
c) Cơng suất u cầu của động cơ:
Ta có cơng thức tính cơng suất động cơ:
P = T.
( 1.4)
Từ công thức trên ta áp dụng vào tính tốn cơng suất của động cơ tại các thời
điểm:
Tại thời điểm 0s:
Trang 12
8
Đồ án môn học: Điều khiển truyền động điện
GVHD: Lê Tiến Dũng
P = 0 (W)
Tại thời điểm 1s:
P = 3.33.33 100 (W)
Từ 1s đến 3s tốc độ động cơ không thay đổi:
P =0.33,330(W)
Tại thời điểm 3s:
P = -6.33,33 -200(W)
Tại thời điểm 3.5s:
P = -6.0 =0 (W)
Tại thời điểm 4s:
P = -6.-33,33 200(W)
Từ 4s đến 6s:
P= 0.-33,330(W)
Tại thời điểm 6s:
P= -33,33.3 = -100 (W)
Tại thời điểm 7s:
P = 0 (W)
Ta có đồ thị công suất của động cơ:
250
200
200
150
100
100
P (W)
50
0
0
0
0
1
0
2
0
3
0
4
5
0
0
6
7
-50
-100
-100
-150
-200
-200
-250
Axis Title
Trang 13
8
Đồ án môn học: Điều khiển truyền động điện
GVHD: Lê Tiến Dũng
Hình 1.6 Đồ thị cơng suất của động cơ
1.4 Tính chọn cơng suất động cơ
1.4.1 Cơng suất đẳng trị:
Từ đồ thị công suất của động cơ được vẽ như hình 1.6, ta dễ dàng tính ra
được cơng suất đẳng trị của động cơ theo công thức:
(1.5)
Động cơ chọn phải có:
Chọn hệ số dự trữ . Lúc này:
1.4.2 Momen đẳng trị yêu cầu:
Từ đồ thị momem của động cơ được vẽ như hình 1.5, ta dễ dàng tính ra
được momen đẳng trị của động cơ theo công thức:
Động cơ chọn phải có:
Chọn hệ số dự trữ . Lúc này:
1.5 Tổng hợp đặc tính tải yêu cầu:
Từ các đồ thị tốc độ ( Hình 1.4), momem ( Hình 1.5) và cơng suất ( Hình 1.6) ta
rút ra được kết luận.
- Với 0 �t 1 :
Tem 0, 0 nên P>0
Động cơ làm việc ở góc phần tư thứ I.
- Với 1 �t 3 :
Tem 0, 0 nên P=0
Trang 14
Đồ án môn học: Điều khiển truyền động điện
GVHD: Lê Tiến Dũng
- Với 3 �t 3.5 :
Tem 0, 0 nên P<0
Động cơ làm việc ở góc phần tư thứ II.
- Với 3.5 �t 4 :
Tem 0, 0 nên P>0
Động cơ làm việc ở góc phần tư thứ III.
- Với 4 �t 6 :
Tem 0, 0 nên P=0
- Với 6 �t 7 :
Tem 0, 0 nên P<0
Động cơ làm việc ở góc phần tư thứ IV.
Vậy động cơ làm việc ở cả 4 góc phần tư.
Hình 1.7: Sơ đồ bốn góc phần tư.
1.6 Lựa chọn động cơ và hộp số:
Từ các thơng số đã tính tốn ta chọn động cơ 148867 RE 40 Ø40 mm, Graphite
Brushes, 150 Watt của hãng MAXON sản xuất:
Trang 15
Đồ án môn học: Điều khiển truyền động điện
GVHD: Lê Tiến Dũng
Hình 1.8: Động cơ 148867 RE 40 Ø40 mm, Graphite Brushes, 150 Watt
Bảng tham số của động cơ:
Tên tham số
Công suất định mức
Điện áp định mức
Tốc độ định mức
Tốc độ tối đa
Dòng điện định mức
Dòng điện tối đa
Momen định mức
Momen cực đại
Trở kháng
Cảm kháng
Giá trị
150
24
6940
12000
6
80,2
0,177
2,42
0,299
0,0824
0,033
Đơn vị đo
W
V
Vịng/phút
Vịng/phut
A
A
N.m
N.m
Ω
mH
KT
V/rad/s
B1
2,44x10-4
Nm/rad/s
Bảng 1.1: Thơng số của động cơ
Ta kiểm nghiệm lại động cơ:
- Tốc độ định mức của động cơ:
- Hệ truyền động cần tốc độ 33,33 (rad/s)
Ta thấy rằng tốc độ của động cơ rất cao gấp nhiều lần tốc độ cần thiết nhưng
momen thì rất nhỏ chưa đủ đáp ứng yêu cầu của tải vì vậy chúng ta cần gắn
thêm hộp số phù hợp để tăng momen và giảm tốc độ động cơ.
Vậy hệ số giảm tốc cần thiết nhỏ hơn hoặc bằng: =
Trang 16
Đồ án môn học: Điều khiển truyền động điện
GVHD: Lê Tiến Dũng
- Ta chọn hộp số có thơng số cơ bản sau :
Thông số
Tỷ số
Giá trị
20:1
Bảng 1.2: Thông số của hộp số
Đơn vị
Ta kiểm nghiệm lại hộp số:
- Tốc độ định mức quy đổi: = 36,3 > 33,33 (rad/s)
- Momen định mức quy đổi: Tmax = Tđm.20 = 0,177.20 = 3,54 > 3,06 (N.m)
Vậy hộp số đáp ứng được yêu cầu hệ thống truyền động.
Sau khi chọn được hộp số ta tính lại chính xác tốc độ và momen quy đổi về
trục động cơ như sau :
800
666.6
666.6
600
400
�(rad/s)
200
0
0
0
0
1
2
0
3
4
5
6
-200
-400
-600
-666.6
-666.6
-800
t(s)
Hình 1.9 : Tốc độ yêu cầu của động cơ khi gắn giảm tốc.
Trang 17
7
8
Đồ án môn học: Điều khiển truyền động điện
0.2
0.15
GVHD: Lê Tiến Dũng
0.15
0.15
0.15
0
0
6
7
0.1
T (N.m)
0
0
0
1
2
0
0
3
4
-0.3
-0.3
5
-0.1
-0.2
-0.3
-0.4
t (s)
Hình 1.10 : Momen của động cơ khi gắn giảm tốc.
1.7 Thông số bộ biến đổi công suất :
1.7.1 Phân tích yêu cầu của hệ truyền động điện :
Với đổi tượng điều khiển là động cơ điện một chiều kích từ động lập ta lựa
chọn phương án thay đổi tốc độ động cơ bằng cách thay đổi điện áp phần ừng
đặt vào động cơ. Bởi vì nó có những ưu điểm sau : khơng gây thêm tổn hao
trong động cơ điện nhưng địi hỏi phải có nguồn riêng, có điện áp điều chỉnh
được. Phương pháp này cho phép điều chỉnh tốc độ quay dưới tốc độ định mức
vì khơng thể nâng cao điện áp hơn điện áp định mức của động cơ điện.
1.7.2 Bộ biến đổi công suất :
Với phương án như đã trình bày ở mục 1.6.1 ta lựa chọn hệ chỉnh lưu-động cơ
(T-Đ) với 2 bộ chỉnh lưu cầu 3 pha được mắc song song ngược với nhau, được
mơ tả ở hình 1.7 vơi những lí do sau đây.
- Tốc độ yêu cầu của tải khơng q lớn (33.3 rad/s).
- Có khả năng điều chỉnh cho động cơ hoạt động ở cả 4 góc phần tư
theo yêu cầu của tải.
- Thiết kế đơn giản và dễ điều khiển.
Trang 18
8
Đồ án môn học: Điều khiển truyền động điện
GVHD: Lê Tiến Dũng
Hình 1.11 : Mạch chỉnh lưu cầu 3 pha gồm 2 bộ mắc song song ngược.
1.7.4 Tính chọn Thyristor cho bộ biến đổi công suất :
Điện áp ngược lớn nhất mà thyristor phải chịu:
Trong đó:
điện áp tải, điện áp nguồn xoay chiều, điện áp ngược của van;
các hệ số điện áp ngược và điện áp tải;
Đối với bộ chỉnh lưu cầu 3 pha điều khiển đối xứng thì ;
Điện áp ngược mà thyristor cần chọn:
= 43,68 V
Dòng làm việc của van được tính theo dịng hiệu dụng:
Trong đó:
hệ số xác định dòng điện hiệu dụng ()
: dòng điện tải (A)
Chọn điều kiện làm việc của van có cánh tỏa nhiệt và đầy đủ diện tích tỏa
nhiệt. Khơng có quạt đối lưu khơng khí, với điều kiện đó dịng định mức
của van cần chọn là:
Với hệ số dự trữ dòng điện và chọn bằng 1.5
Trang 19
Đồ án môn học: Điều khiển truyền động điện
GVHD: Lê Tiến Dũng
Chọn thyristor 40TPS12A (Hình 1.8) có các tham số như sau:
Điện áp ngược cực đai: 800-1200V
Dòng điện cực đại: 50A
Đỉnh xung dòng điện: 500A
Dòng điều khiển: 50mA
Điện áp của xung điều khiển: 4V
Sụt áp lớn nhất của thyristor lúc dẫn: 1.23V
Nhiệt độ làm việc cực đại: 125oC
Hình 1.12: Thyristor 40TPS12A
1.8 Tính tốn và chọn các cảm biến:
1.8.1 Chọn cảm biến tốc độ:
Ta chọn cảm biến tốc độ của hãng HA25 của hãng DYNAPAR:
Trang 20
Đồ án môn học: Điều khiển truyền động điện
GVHD: Lê Tiến Dũng
Hình 1.31 Cảm biến tốc độ HA25
Thơng số kĩ thuật:
Điện áp đính mức: 5-26V DC
Dịng tiêu thụ: < 80mA
Cơng nghệ: sử dụng công nghệ quang học.
Tốc độ làm việc tối đa: 8000 (RPM)
Độ phân giải: 2500 (PPR)
Số kênh: 3 kênh
1.8.2 Chọn cảm biến dòng điện
Ta chọn cảm biến dòng HST21 50A của hãng YHDC.
Hình 1.14 Cảm biến dịng điện HST21-50A
Thông số kĩ thuật:
- Giới hạn đo: ±50 A
- Điện áp hoạt động: ± 15 VDC
- Điện áp đầu ra định mức: ±4VDC ± 0.1% (RL =10KΩ)
- Thời gian đáp ứng: < 3 µs
- Dịng tiêu thụ: trong khoảng 15mA
Trang 21
Đồ án môn học: Điều khiển truyền động điện
GVHD: Lê Tiến Dũng
- Nhiệt độ hoạt động: -10oC đến 70oC
1.9 Lựa chọn thiết bị bảo vệ:
1.9.1 Lựa chọn aptomat:
Động cơ có cơng suất định mức là 150W
=> Dịng định mức ở nguồn là : Idm = 0,7 (A)
Ta chọn hệ số dựa trữ k = 1,5 => Itt= 1,05 (A)
Lựa chọn aptomat CHINT NXB-63-C63 có thơng số như sau:
-
Dịng đinh mức : 6A
Dòng cắt ngắn mạch : 6kA
Điện áp định mức :240/415 V
Loại: 3 pha
Hình 1.15: Aptomat CHINT NXB-63 6A
1.9.2 Lựa chọn cầu chì:
Cầu chì bảo vệ động cơ cần 2 điều kiện:
Lấy kt = 1, giả sử khối lượng băng tải và vật đặt trên băng tải trong dây chuyền
nhẹ, nên 2.5 , nên:
(A)
(A)
Ta lựa chọn cầu chì loại: R015-5A của CNYJ có thơng số như sau:
- Dịng định mức 5 A
- Điện áp hoạt động < 500V
- Dòng cắt cực đại: 100 A (AC), 5kA (DC).
Trang 22
Đồ án môn học: Điều khiển truyền động điện
GVHD: Lê Tiến Dũng
Hình 1.16: Cầu chì R015-5A của CNYJ.
1.10 Lựa chọn bộ điều khiển:
Theo như yêu cầu, ta cần phải sử dụng 2 mạch vòng điều khiển để điều khiển
hệ thống đó là:
Mạch vịng tốc độ: Dùng để kiểm sốt tốc độ động cơ theo tốc độ mong muốn.
Mạch vòng dòng điện: Kiểm sốt dịng điện phần ứng của động cơ (khi khởi
động động cơ).
Sơ đồ khổi mô ta hệ thống tổng quát được thể hiện ở hình 1.9 :
Hình 1.17 Sơ đồ khối hệ thống
Trang 23
Đồ án môn học: Điều khiển truyền động điện
GVHD: Lê Tiến Dũng
Bảng 1.1: Thông số các thành phần trong hệ thống
Tên chi tiết
Thông số
Động cơ MAXON 148867 RE 40 -Công suất định mức: 150W
Ø40 mm, Graphite Brushes, 150 - Điện áp định mức : 24V
Watt
- Tốc độ định mức : 6940 rpm
- Dòng điện định mức : 6 A
- Momen định mức: 0,177 N.m
Encoder HA25
Cảm biến dòng HST21 50A
Thyristor 40TPS12A
-Điện áp đính mức: 5-26V DC
-Dịng tiêu thụ: < 80mA
-Cơng nghệ: sử dụng công nghệ quang học.
-Tốc độ làm việc tối đa: 8000 (RPM)
-Số kênh: 3 kênh
-Giới hạn đo: ±50 A
- Điện áp đầu ra định mức: ±4VDC ± 0.1%
(RL =10KΩ)
-Thời gian đáp ứng: < 3 µs
- Dịng tiêu thụ: trong khoảng 15mA
-Điện áp ngược cực đai: 800-1200V
-Dòng điện cực đại: 40A
-Dòng điều khiển: 50mA
-Điện áp của xung điều khiển: 4V
Cuộn cảm L
Aptomat CHINT NXB-63-C63
Cầu chì R015-5A
0,01 H
- Dịng đinh mức : 4A
- Dòng cắt ngắn mạch : 6kA
- Điện áp định mức :240/415 V
- Loại: 3 pha
- Dòng định mức 5 A
- Điện áp hoạt động < 500V
- Dòng cắt cực đại: 100 A (AC), 5kA (DC).
CHƯƠNG 2: MƠ HÌNH HĨA HỆ THỐNG TRUYỀN
ĐỘNG ĐIỆN
Mơ hình hóa là xác định và tính tốn các phương trình tốn học của các
chi tiết trong hệ thống dựa trên nguyên lý, thông tin, tính chất của các đối tượng
Trang 24
Đồ án môn học: Điều khiển truyền động điện
GVHD: Lê Tiến Dũng
trong hệ thống. Kết quả của quá trình này cho phép chúng ta xây dựng hệ thống
có thể hoạt động với các thông số gần như trong thực tế để có thể mơ phỏng,
kiểm nghiệm và tiết kệm chi phí hơn so với làm thực tế.
2.1 Mơ hình tốn tổng qt của hệ thống:
Hình 2.1 Mơ hình tổng qt của hệ thống.
Từ những bước xác định thành phần ở chương 1, hệ thống truyền động
điện của đề tài gồm các bộ phận sau và ta cần tìm ra các mơ tả tốn học của
từng bộ phận:
Thành phần
Bộ điều khiển
Đầu vào
: tốc độ đặt
: tốc độ phản hồi
i
: Dòng điện phản hổi
Đầu ra
Vc : Điện áp điều khiển
Va: Điện áp phần ứng động cơ
Bộ chỉnh lưu cầu Vc : Điện áp điều khiển
3 pha
Va : Điện áp phần ứng động cơ
Động cơ một
: Dòng điện động cơ
chiều
: Tốc độ động cơ
Cảm biến dòng
: Dòng điện động cơ
I: Dòng điện phản hồi
: Tốc độ phản hỏi
Cảm biến tốc độ
: Tốc độ động cơ
Bảng 2.1: Danh sách các khối có trong hệ thống.
2.2. Mơ hình tốn học của động cơ điện một chiều kích từ độc lập
Động cơ điện một chiều kích từ độc lập được sử dụng rộng rãi trong thực
tế.Khi đặt lên dây quấn kích từ một điện áp nào đó thì trong dây quấn kích từ
sẽ có dịng điện và mạch từ của máy sẽ có từ thơng Ф. Tiếp đó đặt một giá trị
điện áp V lên mạch phần ứng thì trong dây quấn phần ứng sẽ có dòng điện ia
chạy qua, tương tác giữa dòng điện phần ứng và từ thơng kích từ tạo thành
mơmen điện từ. Vậy ta có các phương trình cơ bản của động cơ một chiều.
Trang 25