Bài tập robot công nghiệp
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (243.25 KB, 9 trang )
ROBOT CÔNG NGHIỆP
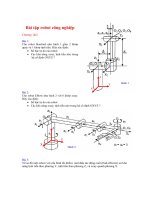
Bài 1. Xác định vector dịch chuyển khi quay quanh vector y của F so với F
1
0
Xác định tọa độ của điểm 2 so với hệ tọa độ F nếu biết các tham số: a=4, b=5, c=6 và
0
°
=60
1
Dễ thấy mp X0OZ0 và mp X1OZ1 đồng phẳng.
Trong mp X1OZ1: OA = = =
Ta có: = => góc X0OZ1 =
1
tan(AOZ1) =
=
=> góc AOZ1 =
=> góc AOX0 = 51- 30 =
=> Sin () = hay e = sin (). = 2,29
Cos () = hay d= . cos () = 5,97
Vậy tọa độ của điểm 2 so với hệ tọa độ Fo (Xo Yo Zo) = (d,c,e) = (5,97 ;6 ;-2,29)
(Dấu – vì nằm phía bên kia so với trục Zo)
Bài 2. Tìm tọa độ của điểm 2 so với hệ tọa độ F nếu biết các tham
0
°
số: a=4, b=5, c=6, g=3.5 và =60
1
Theo bài 1 ta có d= 5,97; e= 2,29 và c =6
Vì hệ trục tịnh tiến theo Xo 1 khoảng g= 3,5 nên ta có:
Sau khi thực hiện phép tịnh tiến theo Xo:
d1= d + 3,5 = 5,97 + 3,5 = 9,47
e1= e = 2,29 và c1=c =6
Vậy tọa độ của điểm 2 so với hệ tọa độ Fo (Xo Yo Zo) = (d1,c1,e1) = (9,47;6 ; -2,29) .
(Dấu – vì nằm phía bên kia so với trục Zo)
Bài 3. Dịch chuyển tọa độ 10cm theo trục Xo.
Quay 1 góc 90 độ quanh trục Zo
Xác định ma trận chuyển đổi F2/Fo.
Ta có H = Rot(Zo,90) Trans(10,0,0)
Bài 4. Dịch chuyển tọa độ 10cm theo trục Xo
Quay một góc 90 xung quanh trục Z1
Xác định ma trận chuyển đổi F / F
2 0
=Trans(10,0,0) Rot(,)
Bài 5.
X=
X=Trans (0.5,1,0.75) RPY
X=
Bài 6. ϴ1 = 2700, ϴ2 = 900,d3 = 200 mm
Lien
ϴ
di
ai
ti
1
270o
800
600
0o
2
90o
275
550
180o
3
0o
175
0
0o
Ta có : T2 = Ao1 . A21 . A23
=
=
Ma trận thuần nhất giữa vật và tay máy :
X = C . Tn .Gk
Ta có : C = Trans ( 0,0,500) . Rot (XR , 90o) . Rot (YR+, 90o)
==
Gk = Trans (0, 0, 175). Rot (Z3, -90o)
=
Ta có:
X = C.T3.Gk =
=
=
=
X=