Lý thuyết điều khiển tự động bài giảng dành cho sinh viên Đại học và cao đẳng
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (2.73 MB, 144 trang )
TRƯỜNG ĐẠI HỌC PHẠM VĂN ĐỒNG
KHOA KĨ THUẬT CÔNG NGHỆ
----------***----------
BÀI GIẢNG
LÝ THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG
(Bậc ĐH ngành Công nghệ kỹ thuật cơ khí)
(Đào tạo tín chỉ: 02 tín chỉ)
Biên soạn: ThS. Phạm Trường Tùng
Quảng Ngãi, 2014
Lý thuyết điều khiển tự động
ThS. Phạm Trường Tùng
LỜI NÓI ĐẦU
Lĩnh vực điều khiển tự động là một lĩnh vực rất rộng và sâu. Lý thuyết điều
khiển được xây dựng trên nền tảng toán học. Chính vì vậy, lĩnh vực này thực sự
là một thách thức cho nhiều người khi nghiên cứu đến.
Hiện nay, các hệ thống tự động được sử dụng rộng rãi trong công nghiệp
và cuộc sống. Nhằm giúp cho các bạn sinh viên và những người quan tâm đến
lĩnh vực điều khiển thuận lợi cho việc nghiên cứu và học tập, tôi đã tham khảo
và biên soạn bài giảng này.
Bài giảng được biên soạn trên cơ sở chương trình đào tạo môn Lý thuyết
điều khiển tự động của Trường ĐH Phạm Văn Đồng. Quá trình biên soạn tôi có
tham khảo nhiều tài liệu trong và ngoài nước, nhưng nền tảng chính là tài liệu
Modern control engineering của P.N. Paraskevopoulov.
Quá trình biên soạn không tránh những thiếu sót, mong nhận được sự góp
ý của bạn đọc.
Mọi góp ý xin gởi về:
Phạm Trường Tùng – Khoa kĩ thuật công nghệ - Trường ĐH Phạm Văn
Đồng – TP Quảng Ngãi.
E-mail:
1
Lý thuyết điều khiển tự động
ThS. Phạm Trường Tùng
MỤC LỤC
LỜI NÓI ĐẦU ..................................................................................................... 1
MỤC LỤC ............................................................................................................ 2
CHƯƠNG 1. GIỚI THIỆU VỀ HỆ THỐNG ĐIỀU KHIỂN TỰ ĐỘNG ...... 5
1.1. Giới thiệu ................................................................................................ 5
1.2. Lịch sử của hệ thống điều khiển tự động ............................................. 6
1.3. Cấu trúc của một hệ thống điều khiển tự động................................... 9
1.4. Một số các ví dụ điều khiển trong thực tế. ........................................ 15
Bài tập chương 1. ........................................................................................... 16
CHƯƠNG 2. CƠ SỞ TOÁN HỌC ................................................................... 17
2.1. Những tín hiệu cơ bản ............................................................................ 17
2.2. Phép biến đổi Laplace ............................................................................ 20
2.3. Biến đổi Laplace ngược .......................................................................... 29
2.4. Một số ứng dụng biến đổi Laplace ..................................................... 35
Bài tập chương 2 ............................................................................................ 37
CHƯƠNG 3. MÔ HÌNH TOÁN HỌC CỦA HỆ THỐNG ............................ 40
3.1. Giới thiệu ................................................................................................. 40
3.2. Những vấn đề chính của mô hình toán học .......................................... 41
3.3. Các hình thức của mô hình toán học .................................................... 42
3.4. Phương trình vi phân ............................................................................. 43
3.5. Hàm truyền đạt ....................................................................................... 46
3.6. Đáp ứng xung. ......................................................................................... 48
3.7. Phương trình trạng thái ......................................................................... 49
3.8. Sơ đồ khối ................................................................................................ 52
3.9. Graph tín hiệu ......................................................................................... 60
3.10. Mô hình toán học cho các thành phần của hệ thống điều khiển ...... 64
2
Lý thuyết điều khiển tự động
ThS. Phạm Trường Tùng
Bài tập chương 3 ............................................................................................ 74
CHƯƠNG 4. PHÂN TÍCH HỆ THỐNG ĐIỀU KHIỂN TRONG MIỀN
THỜI GIAN ....................................................................................................... 77
4.1. Giới thiệu ................................................................................................. 77
4.2. Đáp ứng của hệ thống ............................................................................ 77
4.3. Đáp ứng thời gian của hệ thống bậc một và bậc hai......................... 84
Bài tập chương 4. ........................................................................................... 90
CHƯƠNG 5. ỔN ĐỊNH CỦA HỆ THỐNG .................................................... 93
5.1. Giới thiệu ................................................................................................. 93
5.2. Định nghĩa về ổn định ............................................................................ 93
5.3. Các tiêu chuẩn ổn định đại số ............................................................... 99
Bài tập chương 5. ......................................................................................... 110
CHƯƠNG 6. CÁC PHƯƠNG PHÁP THIẾT KẾ BỘ ĐIỀU KHIỂN ...... 112
6.1. Giới thiệu về bộ điều khiển PID .......................................................... 112
6.2. Các bộ điều khiển PD ........................................................................... 113
6.3. Bộ điều khiển PI Hàm truyền đạt của bộ điều khiển PI là: ............. 117
6.4. Bộ điều khiển PID................................................................................. 119
6.5. Thiết kế bộ điều khiển PID sử dụng các phương pháp Ziegler –
Nichols. ......................................................................................................... 124
Bài tập chương 6. ......................................................................................... 127
CHƯƠNG 7. MÔ PHỎNG HỆ THỐNG TỰ ĐỘNG BẰNG
MATLAB\SIMULINK .................................................................................... 129
7.1. Giới thiệu Matlab ................................................................................. 129
7.2. Các lệnh cơ bản trong Matlab ............................................................. 130
7.2.1. Định nghĩa biến .............................................................................. 130
7.2.2. M-file ............................................................................................... 130
7.3. Matlab/Simulink trong điều khiển tự động ....................................... 131
3
Lý thuyết điều khiển tự động
ThS. Phạm Trường Tùng
7.3.1. Mở Simulink ................................................................................... 131
7.3.2. Lập mô hình với Simulink ............................................................. 132
Bài tập chương 7:......................................................................................... 135
BÀI TẬP TỔNG HỢP .................................................................................... 139
BẢNG ĐỐI CHIẾU CÁC TỪ THUẬT NGỮ TIẾNG ANH ....................... 142
TÀI LIỆU THAM KHẢO .............................................................................. 143
4
Lý thuyết điều khiển tự động
ThS. Phạm Trường Tùng
CHƯƠNG 1. GIỚI THIỆU VỀ HỆ THỐNG ĐIỀU KHIỂN TỰ ĐỘNG
Mục tiêu :
Giúp sinh viên có một cái nhìn cơ bản về các khái niệm của hệ thống điều
khiển tự động.
- Sinh viên biết được khái niệm hệ thống và hệ thống điều khiển tự động.
- Phân biệt được hệ thống kín và hở
- Phân biệt được các dạng bài toán trong lý thuyết điều khiển.
- Phân tích được nguyên lý hoạt động của một số hệ thống điều khiển tự
động.
1.1.
Giới thiệu
Một hệ thống điều khiển tự động là một tập hợp các thành phần hoạt
động cùng nhau theo một phương pháp nào đó làm cho hệ thống hoạt động
một cách tự động để đạt được một kết quả mà ta đặt trước.
Một cuộc điều tra gần đây với nhiều máy móc và vật dụng khác nhau được
sản xuất ngày nay đã đi đến kết luận rằng
chúng có một phần hoặc toàn bộ đã được
tự động hóa.
Tủ lạnh, máy nước nóng, máy giặt,
thang máy, TV điều khiển từ xa, hệ thống
Hình 1.1. Máy điều hòa nhiệt độ
thông tin liên lạc toàn cầu và Internet là
các sản phẩm được điều khiển tự động
ứng dụng trong cuộc sống.
Thiết bị điện năng, các lò phản ứng
(phản ứng hạt nhân và phản ứng hóa học),
hệ thống giao thông (xe hơi, máy bay, tàu
biển, trực thăng, tàu ngầm…), robot ( lắp
Hình 1.2. Robot TOSY, một sản
phẩm mang công nghệ tự động
hóa cao của người Việt Nam
ráp, hàn…), hệ thống vũ khí ( điều khiển tên
lửa, rađa…), máy tính ( máy in, điều khiển
ổ đĩa, băng từ…), sản xuất nông nghiệp
(nhà sinh thái, hệ thống tưới tiêu…) là các hệ thống điều khiển trong sản xuất,
quốc phòng.
5
Lý thuyết điều khiển tự động
ThS. Phạm Trường Tùng
Tất cả các ví dụ trên đây đưa đến kết luận
rằng hệ thống điều khiển tự động được sử dụng
trong tất cả các lĩnh vực hoạt động kĩ thuật của
nhân loại và đóng góp vào việc phát triển công
nghệ hiện đại.
Hình 1.3. Hệ thống tên lửa
Hệ thống điều khiển tự động là một đối
tượng không chỉ đáp ứng cho nhu cầu kĩ thuật
công nghệ mà còn cho các lĩnh vực khác như là sinh học, y học, kinh tế, quản lý
và khoa học xã hội. Cá biệt, về mặt sinh học, một hệ thống tự động có thể bắt
chước sinh vật ở các hệ điều khiển sẵn có của nó. Để hiểu được quan điểm này,
chúng ta xem một ví dụ về cơ thể con người, nơi mà có một số lượng lớn các quá
trình được thực hiện một các tự động: như việc bị đói, sự khát nước, sự tiêu hóa
thức ăn, sự hô hấp, điều tiết nhiệt độ cơ thể, hệ tuần hoàn của máu, việc tái sản
xuất tế bào, việc tự chữa lành vết thương… Rõ ràng là không một hình thái sống
nào có thể tồn tại nếu như không có các hệ thống điều khiển tự động, nó chi phối
tất các quá trình trong mọi tổ chức sống.
1.2.
Lịch sử của hệ thống điều khiển tự động
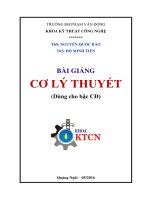
Hệ thống điều khiển tự động đã tồn tại từ thời cổ đại.
Một hệ thống điều khiển tự động cổ
điển nổi tiếng là bộ điều khiển đóng mở cửa
đền thờ của Heron Alexandria ( hình 1.5).
Hệ thống được thiết kế để mở cửa đền thờ
Hình 1.4. Heron Alexandria –
người đã tạo ra các hệ thống
điều khiển tự động từ thời cổ
đại
một cách tự động khi lửa được đốt trên bệ
thờ được đặt bên ngoài đền thờ và đóng cửa
khi lửa tắt.
Hệ thống hoạt động như sau: lửa đốt
nóng không khí ở dưới bệ thờ, không khí
nóng sẽ đẩy nước từ thùng chứa vào trong
xô. Vị trí của thùng chứa nước đã được cố
định, trong khi đó xô nước đang treo từ sợi
Hình 1.5. Hệ thống tự động
đóng mở của đền thờ
dây thừng được quấn quanh hệ thống cơ (
6
Lý thuyết điều khiển tự động
ThS. Phạm Trường Tùng
trục cửa ) với một trọng khối. Khi xô nước trống, hệ thống cơ dưới tác dụng của
trọng khối giữ cho cửa đóng. Khi xô nước
được làm đầy với một lượng nước tương
đương từ thùng chứa, nó sẽ di chuyển xuống,
trong khi trọng khối di chuyển lên. Kết quả là
làm xoay trục cửa và làm cửa mở. Khi lửa
Hình 1.6. Hệ thống rót rượu tự
động của Heron Alexandria
tắt, nước từ xô nước sẽ trở về lại thùng chứa,
trọng khối di chuyển xuống làm cho cửa
đóng lại.
Ngoài hệ thống này, Heron Alexandria còn tạo ra nhiều hệ thống tự động
khác nữa.
Cho đến khoảng giữa thế kỉ thứ 18, hệ thống tự động đã không có một khác
biệt nào so với quy trình đã kể trên. Việc ứng dụng điều khiển đã bắt đầu phát
triển lên giai đoạn 2 từ thế kỉ 18 bởi Jame Watt, người mà năm 1769 đã lần đầu
tiên phát minh ra hệ thống điều chỉnh tốc độ để rồi sau đó đã được ứng dụng
rộng rãi, nhất là trong các đầu máy xe lửa. Thông thường, bộ điều chỉnh này
được sử dụng để điều khiển tốc độ của động cơ hơi nước.
Hệ thống hoạt động như sau:
trong trường hợp vận tốc góc của động
cơ hơi nước tăng lên, lực ly tâm sẽ đẩy
trọng khối m lên và khi đó van hơi
nước sẽ đóng lại. Khi mà van đóng, hơi
nước vào động cơ từ nồi hơi nước giảm
xuống và vận tốc góc của máy hơi
nước sẽ giảm. Ngược lại, khi vận tốc
góc của động cơ hơi nước giảm xuống,
trọng khối m sẽ đi xuống, van hơi nước
Hình 1.6. Hệ thống điều chỉnh tốc sẽ mở, lượng hơi nước vào động cơ sẽ
độ của Jame Watt
tăng lên, kết quả là làm tăng vận tốc
góc. Theo cách này có thể điều chỉnh
được tốc độ động cơ.
7
Lý thuyết điều khiển tự động
ThS. Phạm Trường Tùng
Thời kì này kéo dài đến giữa thế kỉ 19, mang đặc điểm bởi sự phát triển hệ
thống tự động trên cơ sở trực giác mà không có một cơ sở toán học nào cho việc
thiết kế điều khiển.
Đến năm 1868 – Maxwell và năm 1877 – Vyshnegradskill lần đầu tiên sử
dụng cơ sở toán học cho việc thiết kế điều khiển và ứng dụng lý thuyết của họ
đưa ra kết quả bộ điều chỉnh vận tốc ly tâm của Watt. Thành quả toán học của
Routh về sự ổn định được giới thiệu năm 1877 được xem là rất quan trọng.
Lý thuyết về điều khiển tự động và ứng dụng của nó đã được phát triển một
cách nhanh chóng sau đó khoảng 60 năm. Khoảng thời gian 1930 - 1940 là
khoảng thời gian rất quan trọng đối với lịch sử điều khiển tự động, với các lý
thuyết và ứng dụng xuất sắc như của Nyquist và Black được công bố. Trong suốt
những năm đầu thế kỉ XX cho đến thập kỉ 1960, có những nghiên cứu và phát
triển có ý nghĩa đã được công bố như là của Ziegler và Nichols, Bode, Wiener và
Evan.
Tất cả các kết quả của thế kỉ trước cho đến những năm 1960, cấu thành thời
kì điều khiển cổ điển. Sự phát triển ấn tượng của lý thuyết điều khiển cổ điển
được tạo nên bởi sự đòi hỏi của Thế chiến thứ 2.
Sự tiến bộ từ những năm 1960 cho đến ngày nay đặc biệt ấn tượng từ cả hai
lĩnh vực lý thuyết và ứng dụng. Giai đoạn này được xem là giai đoạn của điều
khiển hiện đại với các kết quả ấn tượng của Astrom, Athans, Bellman, Brokett,
Doyle, Francis, Jury, Kailath, Kalman, Luenberger, MacFarlane, Rosenbrock,
Saridis, Wonham, Wolovich, Zames và của nhiều tác giả khác.
Kĩ thuật điều khiển hiện đại được khởi đầu ở Sputnik trong năm 1957 bởi
các nhà sáng tạo của Liên Xô và dự án Apollo của Mỹ với việc đưa con người
lên mặt trăng năm 1969, và đó được xem là sự khởi đầu xuất sắc. Trong những
năm gần đây, một sự phát triển ấn tượng trong điều khiển hệ thống là việc áp
dụng máy tính số. Sức mạnh và sự linh hoạt của nó làm cho nó có thể điều khiển
các hệ thống phức tạp một cách có hiệu quả, bằng cách sử dụng các kĩ thuật chưa
từng được biết đến cho đến nay.
Sự khác nhau về cách tiếp cận giữa điều khiển hiện đại và cổ điển như sau:
vấn đề chính mà hệ thống điều khiển cổ điển nghiên cứu là hệ thống một đầu vào
8
Lý thuyết điều khiển tự động
ThS. Phạm Trường Tùng
một đầu ra. Phương thức thiết kế thường được sử dụng là đồ thị ( ví dụ: quỹ đạo
nghiệm số, biểu đồ Bode hoặc Nyquist…) và do đó nó không cần yêu cầu về
toán học cao cấp. Trong khi đó, vấn đề chính mà hệ thống điều khiển hiện đại
nghiên cứu là hệ thống phức tạp nhiều đầu vào nhiều đầu ra. Phương thức thiết
kế thường sử dụng là sự phân tích dựa trên yêu cầu về toán học cao cấp.
Trong những ứng dụng kĩ thuật điều khiển ngày nay, cả hai phương pháp
điều khiển hiện đại và cổ điển đều được sử dụng. Khi mà điều khiển cổ điển
tương đối đơn giản dễ áp dụng hơn là hệ hiện đại, một kĩ sư điều khiển có thể
chấp nhận theo cách tiếp cận chính sau: những trường hợp đơn giản, khi mà yêu
cầu kĩ thuật thiết kế không đòi hỏi quá khắt khe, anh ta có thể sử dụng kĩ thuật
điều khiển cổ điển, trong trường hợp yêu cầu kĩ thuật đòi hỏi quá khắt khe, anh
ta có thể sử dụng kĩ thuật điều khiển hiện đại.
Ngày nay, hệ thống điều khiển tự động rất quan trọng trong lĩnh vực nghiên
cứu khoa học và phát triển kĩ thuật. Trên toàn thế giới, một số lượng lớn những
nghiên cứu nhằm mục đích phát triển những kĩ thuật điều khiển mới và ứng dụng
chúng vào những lĩnh vực hoạt động của con người nếu có thể.
Cấu trúc của một hệ thống điều khiển tự động.
1.3.
Một hệ thống là sự bao gồm các thành phần ( được nối vào nhau một
cách thích hợp ) mà nó hoạt động cùng nhau theo một kiểu nào đó để thi
hành một nhiệm vụ nào đó.
Để một hệ thống thi hành một nhiệm vụ nào đó, nó phải được kích thích
bởi một tín hiệu vào đúng cách. Hình 1.7 cho ta một cái nhìn đơn giản của khái
niệm trên. Chú ý rằng đáp ứng y(t) có thể được gọi là ứng xử hoặc kết quả của hệ
thống.
u(t)
Hệ thống
Tác nhân kích thích
y(t)
Đáp ứng của hệ thống
Hình 1.7. Sơ đồ nguyên lý của hệ thống với đầu vào và đầu ra
Sử dụng kí hiệu, đầu ra y(t) có mối quan hệ với tín hiệu vào u(t) theo
phương trình:
y(t) = T.u(t)
-
(1.1)
Với T là một toán tử.
9
Lý thuyết điều khiển tự động
ThS. Phạm Trường Tùng
Có 3 phần tử trong phương trình (1.1): đầu vào u(t), toán tử hệ thống T, đầu
ra y(t). Trong hầu hết các bài toán công nghệ, ta thường biết được 2 trong 3 phần
tử này và chúng ta phải đi tìm phần tử thứ 3. Do đó, sẽ có 3 bài toán công nghệ
cơ bản phát sinh, đó là:
1. Bài toán phân tích: Ở đây, chúng ta biết được tín hiệu vào u(t) và toán tử hệ
thống T, và chúng ta phải đi tìm tín hiệu ra y(t).
2. Bài toán tổng hợp: Ở đây, người ta cho đầu vào và đầu ra, yêu cầu ta thiết
kế hệ thống T.
3. Bài toán về đo lường: Ở đây, người ta cho hệ thống T và đầu ta y(t), yêu cầu
ta đo đại lượng đầu vào x(t).
Bài toán về thiết kế điều khiển không thuộc vào 3 bài toán trên và nó sẽ
được định nghĩa riêng ở dưới đây.
Định nghĩa 1.3.1
Cho một hệ thống T được điều khiển và đáp ứng mong muốn của hệ thống
là y(t), tìm một tín hiệu vào u(t) thích hợp, theo đó, khi mà tín hiệu này đặt vào
hệ thống T, đầu ra của hệ thống có đáp ứng mong muốn y(t). Ở đây, tín hiệu vào
u(t) thích hợp đó được gọi là tín hiệu điều khiển.
Từ định nghĩa 1.3.1 thấy rằng bài toán về thiết kế điều khiển là một bài
toán tổng hợp tín hiệu: cụ thể là tổng hợp tín hiệu điều khiển u(t). Tuy nhiên,
trong thực tế bài toán thiết kế điều khiển được đơn giản hóa bằng việc thiết kế bộ
điều khiển ( xem định nghĩa 1.3.4).
Hệ thống điều khiển chia thành hai bộ phận: là hệ thống hở và hệ thống
kín.
Định nghĩa 1.3.2
Một hệ thống hở ( open – loop - hình 1.8a) là một hệ thống mà đầu vào u(t)
không phụ thuộc vào đầu ra y(t) ( u(t) không phải là một hàm của y(t)).
Định nghĩa 1.3.3
Một hệ thống kín ( closed-loop – hình 1.8b) và một hệ thống mà đầu vào
u(t) phụ thuộc vào đầu ra y(t) ( u(t) là một hàm của y(t)).
10
Lý thuyết điều khiển tự động
ThS. Phạm Trường Tùng
Hình 1.8. Hai kiểu hệ thống, hệ mở (a); hệ kín (b)
Trong hệ thống điều khiển, tín hiệu điều khiển u(t) không phải là đầu ra của
một máy phát, nhưng là đầu ra của một thành phần khác mới được ta thêm vào
để có thể điều khiển được. Thành phần mới thêm vào được gọi là bộ điều khiển
– controller ( trong trường hợp đặc biệt có thể gọi là bộ điều chỉnh hay bộ phận
bù).
Hơn nữa, trong các hệ thống điều khiển, bộ điều khiển được kích thích bởi
một tín hiệu r(t), được gọi là tín hiệu đặt. Tín hiệu đặt r(t) chỉ rõ kết quả mong
muốn ( mong muốn đầu ra y(t) của hệ thống kín hoặc hở). Theo đó, chúng ta
nhắm đến việc thiết kế một bộ điều khiển thích hợp sao cho đầu ra y(t) càng gần
r(t) càng tốt. Trong thực tế, trong một hệ thống hở, bộ điều khiển chỉ chịu kích
thích bởi tín hiệu r(t) và nó được thiết kế sao cho đầu ra u(t) của nó là một tín
hiệu đầu vào thích hợp để điều khiển hệ thống. Trong hệ thống kín, bộ điều
khiển không chỉ chịu kích thích bởi r(t) mà
còn bởi đầu ra y(t). Do đó, trong trường hợp
này, tín hiệu điều khiển u(t) phụ thuộc cả hai
r(t) và y(t). Để có thể hiểu dễ dàng hơn về hệ
kín và hệ hở, chúng tôi giới thiệu một số các
ví dụ sau.
Một ví dụ rất đơn giản của một hệ
Hinh 1.9. Máy giặt – một mô
hình hệ thống hở
thống hở là máy giặt quần áo ( hình 1.9). Ở
đây, tín hiệu đặt r(t) chỉ định những điều kiện
hoạt động khác nhau mà chúng ta thiết lập
trên “bộ lập chương trình”, như là nhiệt độ nước, khoảng thời gian thay đổi chu
11
Lý thuyết điều khiển tự động
ThS. Phạm Trường Tùng
kì giặt, khoảng thời gian vắt quần áo… Những điều kiện hoạt động đó được chọn
lựa một cách cẩn thận để hoàn thành việc giặt quần áo một cách thõa đáng. Bộ
điều khiển ở đây chính là bộ “lập chương trình” với tín hiệu ra của nó là tín hiệu
điều khiển. Tín hiệu điều khiển này là đầu vào và là động lực cho máy giặt thực
hiện hoạt động theo mong muốn được thể hiện qua tín hiệu đặt r(t). Đầu ra y(t)
của hệ thống là chất lượng giặt giũ. Trong suốt quá trình hoạt động của máy giặt,
đầu ra ( được hiểu như là việc quần áo đã được giặt tốt hay chưa) đã không được
đưa vào hệ thống để xem xét. Máy giặt chỉ thực hiện theo một chuỗi các hoạt
động được chứa trong u(t) mà không xét đến sự ảnh hưởng của y(t). Điều đó có
nghĩa là u(t) không phải là một hàm của y(t) và theo đó, máy giặt chính là một
kiểu ví dụ cho hệ thống vòng hở. Một số các ví dụ khác như là hệ thống lò sưởi
điện, hệ thống báo giờ, thang máy, đèn giao thông, hệ thống viễn thông quốc tế,
máy tính, internet….
Một ví dụ rất đơn giản để giới thiệu về hệ thống vòng kín là máy nước
nóng. Ở đây, hệ thống là máy nước nóng và
đầu ra là nhiệt độ của nước. Chúng ta hãy
xem xét nhiệt độ của nước trong khoảng từ
650C đến 700C.
Trong ví dụ này, nước được đun nóng
bởi năng lượng điện bằng một điện trở bằng
một dòng điện chạy qua. Bộ điều khiển là
một bộ điều chỉnh nhiệt độ với cách làm việc
như là những công tắt như sau: nếu nhiệt độ
Hình 1.10. Hệ thống nước
nóng - một mô hình hệ thống
kín
lớn hơn 700C thì công tắt mở và ngắt dòng
điện. Kết quả là nhiệt độ nước bắt đầu giảm
xuống và khi nhiệt độ xuống dưới 650C,
công tắt sẽ đóng và dòng
điện được cung cấp trở
lại. Sau đó, nhiệt độ lại
Hình 1.11. Sơ đồ khối của hệ thống nước nóng
tăng lên đến 700C và
công tắc lại mở. Quá
12
Lý thuyết điều khiển tự động
ThS. Phạm Trường Tùng
trình cứ lặp đi lặp lại liên tục giữ nhiệt độ nước trong khoảng nhiệt độ cho phép,
trong trường hợp này là từ 65 đến 700C.
Xem xét một cách cẩn thận ví dụ trên chỉ ra rằng bộ điều khiển ( bộ điều
chỉnh nhiệt độ ) cung cấp một tín hiệu vào u(t) thích hợp để làm nóng nước. Rõ
ràng là tín hiệu u(t) nhất định chịu sự tác động của đầu ra y(t), u(t) không chỉ là
một hàm của r(t) mà còn là một hàm phụ thuộc vào y(t). Theo cách đó, chúng ta
có một ví dụ đặc trưng về hệ thống vòng kín.
Những ví dụ khác về hệ thống vòng kín có thể kể đến như là tủ lạnh, bộ ổn
áp, hệ thống điều khiển mực chất lỏng, bộ điều chỉnh vị trí, điều chỉnh vận tốc,
hệ thống điều khiển phản ứng hạt nhân, robot, hệ điều khiển máy bay… Tất cả
các hệ thống vòng kín đều có nguyên tắc hoạt động giống như máy nước nóng
đã được trình bày ở trên.
Cần chú ý rằng trong một số trường hợp hệ thống không chỉ hoàn toàn là tự
động. Con người có thể tác động như là một bộ điều khiển hoặc là một phần của
bộ điều khiển, ví dụ như việc lái xe, đi bộ, và nấu nướng. Trong trường hợp lái
xe, xe là một hệ thống và đầu ra của hệ thống là góc rẽ hoặc/ và tốc độ của xe.
Người lái xe điều khiển chiếc xe và tác động nó như sau: anh ta đạp vào chân ga
nếu như tốc độ của xe xuống quá thấp và xoay vô lăng xe nếu như muốn xe rẽ
trái hay rẽ phải. Theo đó, có thể xem như việc điều khiển xe như là một cấu trúc
của một hệ thống vòng kín, với người lái xe là một bộ điều khiển. Còn khi chúng
ta nấu nướng, chúng ta kiểm tra thức ăn trong lò và điều chỉnh nhiệt độ cho phù
hợp. Trong trường hợp này, việc nấu ăn cũng có thể xem như là một hệ thống
vòng kín.
Từ các ví dụ trên, chúng ta có thể thấy là có sự khác biệt giữa hệ thống
vòng kín và hệ thống vòng hở. Sự khác nhau ở chỗ là có hay không việc thông
tin đầu ra của hệ thống được đưa về đầu vào của hệ thống. Hoạt động này được
gọi bằng thuật ngữ feedback (hồi tiếp) và là cơ sở của hầu hết các lý thuyết về
điều khiển tự động.
Thật vậy, một điểm quan trọng có thể chỉ ra rằng trong một hệ thống vòng
hở, nếu như kết quả của hệ thống không được như ý, bộ điều khiển không thể
13
Lý thuyết điều khiển tự động
ThS. Phạm Trường Tùng
làm được gì để cải thiện. Ngược lại, trong hệ thống vòng kín, bộ điều khiển vẫn
có cách để giữ cho kết quả của hệ thống nằm trong một giới hạn mong muốn.
Hệ thống vòng kín được sử dụng trong hầu hết các lĩnh vực đòi hỏi chất
lượng cao (cần độ chính xác, tốc độ…) trong khi hệ thống vòng hở được sử dụng
trong các vấn đề điều khiển đơn giản. Trong hầu hết các trường hợp, hệ thống
vòng kín khó thiết kế và thực hiện hơn so với hệ thống vòng hở.
Trên các cơ sở đã nêu trên, chúng ta có thể đưa ra một định nghĩa nổi tiếng
về vấn đề thiết kế điều khiển.
Định nghĩa 1.3.4.
Cho một hệ thống T được điều khiển với đáp ứng đầu ra là y(t), tìm bộ điều
khiển tạo ra đầu vào u(t) cho hệ thống,sao cho khi áp dụng vào hệ thống T, đầu
ra của hệ thống được mô tả bởi đáp ứng y(t).
Rõ ràng là các định nghĩa 1.3.1 và 1.3.4 là tương đương. Trong thực tiễn thì
định nghĩa 1.3.4 lại được sử dụng. Nó có thể giảm bớt yêu cầu điều khiển trong
việc thiết kế bộ điều khiển. Một số phương pháp thiết kế bộ điều khiển đã được
phát triển để cho ra các kết quả mong muốn. Tuy nhiên, trong một số kĩ thuật
tiên tiến, một số vấn đề điều khiển mới xuất hiện, yêu cầu cần phải có những
nghiên cứu và phát triển kĩ thuật mới.
Kết thúc phần này, tôi giới thiệu một số sơ đồ hoàn chỉnh về hệ thống vòng
hở và vòng kín. Hệ thống vòng hở có cấu trúc như hình 1.12 và hệ thống vòng
kín có cấu trúc như
hình 1.13. Trong cả hai
trường hợp, vấn đề yêu
cầu là phải đạt được tín
Hình 1.13. Cấu trúc của một hệ thống điều khiển hở
hiệu ra y(t) gần đến
mức có thể với tín hiệu
đặt r(t). Điều này chứng
minh một cách rõ ràng
trong các hệ thống điều
khiển thực tế đã được
Hình 1.14. Cấu trúc của một hệ thống điều khiển kín
giới thiệu ở trên. Thành
14
Lý thuyết điều khiển tự động
ThS. Phạm Trường Tùng
phần nhiễu được cho là làm thay đổi môi trường của hệ thống hoặc làm thay đổi
chính bản thân của hệ thống, kết quả là làm sai lệch tín hiệu ra thực tế so với tín
hiệu đã mô tả. Trên cơ sở những phương thức đã giới thiệu ở trên, rõ ràng là khi
đầu ra của hệ thống vòng hở thay đổi so với tín hiệu mong muốn bởi nhiễu, hệ
thống không thể làm gì để đưa đầu ra trở lại như tín hiệu đã mô tả. Trong trường
hợp ngược lại, với hệ thống vòng kín, khi đầu ra thay đổi so với tín hiệu mô tả
do nhiễu, thì bộ điều khiển có cách để phục hồi lại tín hiệu ra gần với tín hiệu
mong muốn.
1.4.
Một số các ví dụ điều khiển trong thực tế.
1.4.1 . Bộ điều chỉnh vị trí.
Góc đặt r(t) mong muốn của
bánh lái là tín hiệu vào của hệ thống
và vị trí góc y(t) của đầu ra hộp số là
đầu ra của hệ thống. Ở đây, hệ thống
được thiết kế sao cho y(t) gần với r(t)
đến mức có thể. Nó hoạt động như
sau: góc r(t) và y(t) được chuyển
thành tín hiệu điện áp bằng cách sử
dụng bộ đo điện áp. Sai số e(t) = r(t)
Hình 1.15. Sơ đồ nguyên lý (a) và sơ đồ
khối (b)của bộ điều chỉnh vị trí
– y(y) giữa hai điện áp được đưa vào
bộ khuyếch đại, đầu ra của bộ khuyếc
đại được đưa đến hệ động cơ chính.
Kết quả làm động cơ quay hộp số
theo một hướng nào đó tùy theo sai
lệch e(t) theo cách làm giảm sai
lệch e(t). Theo cách này, đầu ra của
hệ thống sẽ phụ thuộc vào các tín
hiệu r(t), y(t).
1.4.2. Hệ thống cán tấm kim loại
Độ dày mong muốn của tấm
kim loại sau khi cán được thể hiện
Hình 1.16. Sơ đồ nguyên lý (a) và sơ đồ
khối (b)của bộ điều chỉnh độ dày tấm
kim loại ép
15
Lý thuyết điều khiển tự động
ThS. Phạm Trường Tùng
qua tín hiệu r(t) - là đầu vào của hệ thống. Độ dày của tấm kim loại được đo sau
đầu ép là y(t) – là đầu ra của hệ thống. y(t) được đo bằng cảm biến đo độ dày và
được chuyển đổi thành tín hiệu b(t). Bộ so sánh sẽ thực hiện việc so sánh r(t) và
b(t) và tìm ra tín hiệu sai lệch e(t) = b(t) – y(t). Tín hiệu sai lệch e(t) sẽ được
khuếch đại bằng bộ khuếch đại. Sau khi khuếch đại, tín hiệu e(t) sẽ điều khiển cơ
cấu chấp hành thủy lực để điều chỉnh độ hở của cơ cấu ép để đạt được độ dày
mong muốn.
1.4.3. Hệ thống điều khiển nhiệt độ phòng
Nhiệt độ trong buồng được đo bằng
cặp nhiệt. Nhiệt độ trong buồng được chuyển
thành tín hiệu điện. Tùy theo nhiệt độ mà
cường độ điện khác nhau. Dòng điện này sẽ
Hình 1.16. Sơ đồ nguyên lý của bộ
điều chỉnh nhiệt độ buồng đốt
điều khiển độ đóng mở của van điện từ để
điều khiển dòng nhiên liệu vào lò đốt.
Bài tập chương 1.
1.
Giải thích nguyên lý hoạt động của các hệ thống điều khiển tự động sau:
Hình 1.17. Hệ thống điều khiển mức chất lỏng
Hình 1.18. Hệ thống điều khiển cánh máy bay
16
Lý thuyết điều khiển tự động
ThS. Phạm Trường Tùng
CHƯƠNG 2. CƠ SỞ TOÁN HỌC
Trong chương này các cơ sở toán học cần thiết cho việc nghiên cứu hệ
thống điều khiển. Đặc biệt, nó nhắm đến việc đưa ra cơ sở toán học phù hợp
trên các đối tượng là những tín hiệu điều khiển cơ bản, biến đổi Laplace, lý
thuyết về ma trận. Những kiến thức này rất hữu dụng cho hầu hết các phần
trong cuốn sách này.
Mục tiêu:
- Sinh viên hiểu được các dạng tín hiệu cơ bản, cách thức tổng hợp tín hiệu
từ các tín hiệu cơ bản.
- Thành thạo việc biến đổi Laplace thuận và ngược. Ứng dụng vào việc
giải các bài toán vi phân của các hệ thống thông thường.
2.1. Những tín hiệu cơ bản
Trong phần này, tôi giới thiệu những định nghĩa về các tín hiệu điều khiển
cơ bản: như hàm bước nhảy đơn vị (step function), hàm xung ( impulse
function), hàm mũ (exponential function) và hàm sin ( sinusoidal function).
Những tín hiệu này rất quan trọng cho các ứng dụng điều khiển.
2.1.1. Hàm bước nhảy đơn vị ( step function)
Hàm bước nhảy đơn vị (step function) kí hiệu là u(t-T) được định nghĩa
như sau:
1 t > T
u (t − T ) = 0 t < T
undefine
(2. 1)
t =T
Hình 2.1. Hàm bước nhảy đơn vị
Ví dụ 1.
Một ví dụ vật lý của hàm bước
nhảy đơn vị là mạch điện ở hình 2.2.
Tại thời điểm T, công tắc đóng. Rõ
ràng điện áp vR(t) là:
Hình 2.2. Công tắc mạch điện tạo
nên hàm bước nhảy đơn vị trong mạch
17
Lý thuyết điều khiển tự động
ThS. Phạm Trường Tùng
v(t ) t > T
vR (t ) = 0 t < T
undefine t = T
Hay vR(t) = v(t).u(t – T)
Ở đây, công tắc đóng vai trò tạo nên tín hiệu là hàm bước nhảy đơn vị (đối
với điện áp).
2.1.2. Hàm cổng đơn vị (unit gate function)
Hàm cổng đơn vị - unit gate function ( hay còn gọi là hàm cửa sổ) được kí
hiệu bởi gπ(t) = u(t – T1) – u(t – T2), với T1 < T2. Do đó, nó có thể được định
nghĩa như sau:
1 t ∈ (T1 , T2 )
(2.2)
gπ (t ) = 0 t ∉ (T1 , T2 )
undefine t = T1 , t = T2
Hình 2.3. Hàm cổng đơn vị.
Hàm cổng đơn vị được sử dụng để làm bằng không tất cả các giá trị khác
của hàm, ngoại trừ khoảng thời gian cho phép.
Ví dụ 2.
Xem xét một ví dụ về hàm f(t) khi hàm y(t) = f(t)gπ(t), khi đó:
f (t ) T1 ≤ t ≤ T2
y (t ) =
0 t < T 1 , t > T2
Như vậy, hàm cổng đơn vị đã giúp ta làm bằng không ( clear) tất cả các
giá trị của hàm f(t) không nằm trong khoảng (T1,T2).
2.1.3. Hàm xung đơn vị (impulse function – Dirac function)
Hàm xung đơn vị (impulse function), hay còn gọi là hàm Dirac (Dirac
function), được kí hiệu bởi δ(t – T) và được định nghĩa như sau:
0
δ (t − T ) =
∞
∀t ≠ T
t =T
(2.3)
Hình 2.4. Hàm xung Dirac
18
Lý thuyết điều khiển tự động
ThS. Phạm Trường Tùng
Ngoài ra, hàm δ(t – T) còn được định nghĩa theo một cách khác. Xét diện
tích c(t) của hình chữ nhật là c(t) = (1/a).a =1. Khi a là một giá trị rất lớn, đáy
của hình chữ nhật là 1/a trở nên rất nhỏ. Trong giới hạn, chiều cao của a là vô
tận, khi đó đáy 1/a sẽ bằng không. Khi đó, hàm δ(t – T) được định nghĩa như
sau:
δ (t − T ) = lim c(t )
(2.4)
a →∞
Từ định nghĩa đó, chúng ta có được.
∞
∫ δ (t − T )dt = 1
(2.5)
−∞
Định nghĩa (2.5) chỉ ra rằng, diện tích của hàm δ(t – T) bằng 1 ( đó là lý do
vì sao ta gọi là hàm xung “đơn vị” ).
Mối quan hệ giữa hàm bước nhảy đơn vị và hàm xung đơn vị như sau:
t
d
δ (t − T ) = u (t − T ) ⇔ u (t − T ) = ∫ δ (λ − T )d λ
dt
−∞
(2.6)
Cuối cùng, chúng ta có một tính chất thú vị của hàm δ(t – T) như sau: cho
một hàm x(t) với tính chất | x(t) | < ∞, khi đó.
x(T ) =
∞
∫ x(t )δ (t − T )dt
(2.7)
−∞
2.1.4. Hàm dốc ( Ramp function)
Hàm dốc kí hiệu là r(t – T)
được định nghĩa như sau:
t >T
t − T
r (t − T ) =
0 t ≤ T
(2.8)
Hình 2.5. Hàm dốc
Rõ ràng là hàm u(t – T) và hàm r(t – T) có mối quan hệ như sau:
t
u (t − T ) =
d
r (t − T ) ⇔ r (t − T ) = ∫ u (λ − T )d λ
dt
−∞
Chú ý:
Tất cả các hàm trình bày ở trên thường được sử dụng với T = 0. Trong
trường hợp T > 0 thì hàm được làm trễ bởi T đơn vị thời gian, khi mà T < 0 thì
hàm đã được làm sớm đi một T đơn vị thời gian.
19
Lý thuyết điều khiển tự động
ThS. Phạm Trường Tùng
2.1.5. Hàm mũ cơ số e (exponential function)
Hàm mũ là hàm được định nghĩa
f(t) = Aeαt
(2.9)
Hình 2.6. Hàm mũ cơ số e
2.1.6. Hàm sin (sinusoidal function)
Hàm sin là hàm được định
nghĩa:
f(t) = Asin(ωt + θ)
(2.10)
Hình 2.7. Hàm sin
Chú ý :
Tất cả các hàm được giới thiệu ở phần này đều có thể được biểu thị bởi
một phần của hàm mũ hoặc có nguồn gốc từ hàm mũ. Chúng ta có thể dễ dàng
nhìn thấy rằng, hàm sin là một tổ hợp tuyến tính của hai hàm mũ, ví dụ như
sin(θ) = (1/2j)(ejθ - e-jθ), hàm bước nhảy đơn vị với T = 0 bằng với hàm mũ trong
trường hợp A = 1 và α = 0, hàm δ(t – T) và hàm r(t – T) có thể được tạo thành
từ hàm bước nhảy đơn vị, trong khi hàm bước nhảy đơn vị lại được tạo thành
bởi hàm mũ. Hơn nữa, hàm tuần hoàn có thể được biểu thị bằng một tổ hợp
tuyến tính các hàm mũ ( bằng chuỗi Fourier). Ngoài ra, một điều đáng giá có
thể kể đến là hàm mũ được sử dụng để mô tả rất nhiều hiện tượng vật lý, như là
đáp ứng của một hệ thống và bức xạ của đồng vị phóng xạ…
2.2. Phép biến đổi Laplace
2.2.1. Giới thiệu
Để nghiên cứu và thiết kế hệ thống điều khiển, những công cụ được tin
tưởng sử dụng đó là các công cụ về toán học. Những công cụ toán học này – ví
dụ như là phép biến đổi Laplace sẽ làm đơn giản hơn công việc của các kĩ sư
20
Lý thuyết điều khiển tự động
ThS. Phạm Trường Tùng
trong việc hiểu các vấn đề mà anh ta cần giải quyết và đưa ra được một lời giải
hợp lý cho các vấn đề đó.
Với trường hợp đặc biệt là những hệ thống thời gian liên tục với các đại
lượng bất biến tuyến tính – vấn đề chính trong cuốn sách này, thì biến đổi
Laplace là một công cụ toán học rất quan trọng trong việc nghiên cứu và thiết kế
hệ thống. Biến đổi Laplace là một trường hợp đặc biệt của phép biến đổi tích
phân.
Một phép biến đổi tích phân tuyến tính tổng quát của hàm f(t) được định
nghĩa như sau:
b
F ( s ) = ∫ f (t )k ( s, t )dt
(2.11)
a
Với k(s,t) là hạt nhân của phép biến đổi.
Điều này có nghĩa là chức năng chính của hàm (2.11) là biến đổi một hàm
được định nghĩa trong miền t thành một hàm được định nghĩa trong miền s. Một
hạt nhân cụ thể k(s,t) cùng với hai cận tích phân (a,b) định nghĩa thành các phép
biến đổi riêng biệt.
2.2.2. Giới thiệu về phép biến đổi Laplace.
Phép biến đổi Laplace là một phép biến đổi tích phân tuyến tính với hạt
nhân k(s,t) = e-st và thời gian tích phân là (0,∞). Theo cách này, định nghĩa phép
biến đổi Laplace của hàm f(t) sẽ là:
∞
L { f (t )} = ∫ f (t )e− st dt = F ( s )
(2.12)
0
Với L là toán tử biến đổi Laplace và s là một biến phức được định nghĩa
bởi s = σ + jω. Thông thường, hàm thời gian f(t) được viết là f trong khi hàm
biến phức F(s) được viết là F.
Để cho tích phân (2.3-2) hội tụ, hàm f(t) phải thõa mãn điều kiện.
∞
∫
f (t ) e−σ t dt ≤ M
(2.13)
0
Với σ và M là một số dương hữu hạn.
Cùng với L { f (t )} = F ( s) thì phép biến đổi Laplace ngược cũng là một phép
biến đổi tích phân tuyến tính. Nó được định nghĩa là:
21
Lý thuyết điều khiển tự động
L−1 { F ( s )} =
ThS. Phạm Trường Tùng
c + j∞
1
F ( s )e st ds = f (t )
2π j c −∫j∞
(2.14)
Với L-1 là toán tử biến đồi Laplace ngược, j = −1 và c là một hằng số
phức.
Rõ ràng, biến đổi Laplace là một phép biến đổi một hàm từ một miền này
sang một miền khác. Thông thường, nó biến đổi một hàm ở miền thời gian sang
một hàm ở miền tần số và ngược lại. Nó tạo nên một sự linh hoạt cho việc
nghiên cứu ở cả hai miền thời gian và tần số.
Một ứng dụng phổ biến của phép biến đổi Laplace là sử dụng đề giải các
phương trình vi phân tuyến tính với các hệ số hằng. Trong trường hợp này là sử
dụng phép biến đổi Laplace để đơn giản hóa đáp án của phương trình vi phân.
Thực vậy, phép biến đổi Laplace thực sự làm đơn giản hóa đáp án của một
phương trình vi phân hệ số hằng, bằng cách giải các phương trình đại số tuyến
tính. Biến đổi Laplace thì đổi lời giải của phương trình vi phân thành lời giải của
phương trình đại số - điều này làm giảm sự khó khăn trong việc giải phương
trình vi phân đi rất nhiều lần.
2.2.3. Một số tính chất và định lý của phép biến đổi Laplace.
a)
Tuyến tính hóa.
Phép biến đổi Laplace là một phép biến đổi tuyến tính, do đó:
L {c1 f1 (t ) + c2 f 2 (t )} = L {c1 f1 (t )} + L {c2 f 2 (t )} = c1F1 ( s ) + c2 F2 ( s )
(2.15)
Với c1 và c2 là các hằng số và F1 ( s ) = L { f1 (t )} , F2 ( s) = L { f 2 (t )}
b)
Biến đổi Laplace của đạo hàm một hàm.
Với f(1)(t) là đạo hàm của f(t) theo thời gian, và F(s) là biến đổi Laplace của
f(t). Khi đó, biến đổi Laplace của f(1)(t) là:
L { f (1) (t )} = sF ( s ) − f (0)
(2.16)
Chứng minh:
Từ định nghĩa (2.12) ta có:
∞
∞
u = e− st
− st
du =− se
0
0
{vdv==fdf(t )(t )
L { f (1) (t )} = ∫ f (1) (t )e − st dt = ∫ e − st df (t )
=
f (t )e− st
∞
0
∞
+ s ∫ f (t )e − st dt = sF ( s ) − f (0)
0
22
Lý thuyết điều khiển tự động
ThS. Phạm Trường Tùng
Tương tự như vậy với đạo hàm cấp 2 của f(t), chúng ta có:
L { f (2) (t )} = s 2 F ( s ) − sf (0) − f (1) (0)
(2.17)
Cho trường hợp tổng quát, ta có:
L { f ( n) (t )} = s n F (s) − s n−1 f (0) − s n−2 f (1) (0) − ... − sf ( n−2) (0) − f ( n−1) (0)
n−1
= s n F (s) − ∑ s k f ( n−i −1) (0)
(2.18)
k =0
Với f(m)(t) là đạo hàm cấp m của f(t).
c)
Biến đổi Laplace tích phân của một hàm.
t
Cho
∫
f (λ )d λ là tích phân của hàm f(t), với γ là một số dương và F(s) là
−γ
biến đổi Laplace của f(t). Khi đó, biến đổi Laplace của tích phân f(t) là:
t
F ( s ) f ( −1) (0)
+
L ∫ f (λ ) d λ =
s
s
− γ
Với f ( −1) (0) =
(2.19)
0
∫
f (t )dt
−γ
Chứng minh:
Từ định nghĩa (2.12), ta có:
L ∫ f (λ)dλ = ∫ ∫ f (λ)dλ e−st dt
−γ
0 −γ
t
∞
t
t
u= f (λ)dλ
−γ
du= f (t )dt
∫
=
dv=e−st dt
1 − st
v=−s e
∞
∞ t
t
1
1
− ∫ f (λ)dλ e−st + ∫ ∫ f (λ)dλ e−st dt
s −γ
0 s 0 −γ
0
∫ f (λ)dλ F(s) f (−1) (0)
F(s) −γ
=
+
=
+
s
s
s
s
(2.20)
Tương tự như vậy, ta được biến đổi Laplace của tích phân kép của hàm f(t)
là:
t t
2
F ( s ) f ( −1) (0) f ( −2) (0)
+
L ∫ ∫ f (λ ) ( d λ ) = 2 +
s
s2
s
− γ −γ
(2.21)
Với:
f ( −2) (0)
2
= ∫ ∫ f (t ) ( dt )
2
s
−γ −γ
0 0
Cho trường hợp tổng quát ta có:
23
Lý thuyết điều khiển tự động
ThS. Phạm Trường Tùng
t t
F ( s ) f ( −1) (0)
f ( − n ) (0) F ( s ) n f ( − k ) (0)
n
+
+
= n + ∑ n +1− k
L ∫ ... ∫ f (λ ) ( d λ ) = n +
...
s
sn
s
s
k =1 s
−1γ 2 −3γ
n time
(2.22)
Với:
f ( − k ) (0) =
0
0
∫−γ ...−∫γ f (t ) ( dt )
123
2
k time
Chú ý :
Trong trường hợp đặc biệt, khi mà f ( k ) (0) = 0 với k = 0, 1,…,n – 1 và
f ( − k ) (0) = 0 với k = 0, 1,…,n – 1 thì các quan hệ (2.3-8) và (2.3-12) được đơn
giản bằng:
L { f ( n ) (t )} = s n F ( s )
(2.23a)
t t
F ( s)
2
L ∫ ... ∫ f (λ ) ( d λ ) = n
s
−1γ 2 −3γ
n time
(2.23b)
Mối quan hệ (2.23) chỉ ra một đặc trưng rất quan trọng của phép biến đổi
Laplace là có thể đơn giản hóa cách thức tính đạo hàm và tích phân của hàm
f(t). Thật vậy, biến đổi Laplace đã biến đổi phép đạo hàm trong miền thời gian
thành phép nhân F(s) với s trong miền tần số. Mặc khác, nó cũng biến phép tích
phân trong miền thời gian thành phép chia giữa F(s) và s trong miền tần số.
d)
Tỉ lệ thời gian.
Cho hàm f(t) và hàm f(αt) với α là số dương. Hàm f(αt) và hàm f(t) khác
nhau ở chỗ thời gian đã được nhân lên α lần. Với hai hàm này, ta có được:
L { f (α t )} =
1
s
F ( ) với F ( s ) = L { f (t )}
α α
(2.24)
Chứng minh:
Theo định nghĩa (2.12) ta có:
∞
L { f (α t )} = ∫ f (α t )e− st dt =
0
1
α
∞
∫
f (α t )e
−
s
(α t )
α
d (α t )
0
24