- Trang chủ >>
- Khoa học tự nhiên >>
- Vật lý
Cảm biến đo vận tốc góc mems
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (1.48 MB, 33 trang )
Khóa Luận Tốt Nghiệp
Giáp Văn Phước
PHN M U
1. Lý do chn ti:
MEMS (Micro Electro Mechanical Systems) - công nghệ chế tạo tích
hợp linh kiện cơ và linh kiện điện phỏt trin mạnh, được gọi là công nghệ chế
tạo vi cơ điện tử. MEMS l s tớch hp ca cỏc yu t c, cm bin, b kớch
hot v cỏc yu t in chung trờn mt Si da trờn cụng ngh vi ch to.
ó v ang to ra nhng thay i mang tớnh cỏch mng trong ch to linh
kin kớch c micro, c ng dng trong cỏc lnh vc cụng nghip, in t
dõn dng, quõn s
Cụng ngh MEMS ó em li s phỏt trin mnh m cho cụng ngh
in t, ng dng ch to ra nhng sn phm cụng ngh cao, c bit l cụng
ngh ch to cỏc loi cm bin, mt trong nhng thit b cụng ngh cao c
ng dng rt nhiu trong cỏc nghnh k thut.
Cỏc loi cm bin ó c ng dng thnh cụng trong nhiu lnh vc
ca khoa hc cụng ngh, trong cỏc thit b: o lng, tỡm kim, phỏt hin,
cm nhn v.v Cm bin o vn tc gúc c ng dng trong lnh vc o
vn tc gúc hay mc thay i gúc quay, c s dng trong rt nhiu loi
thit b khỏc nhau tựy vo mc ớch s dng v ó em li nhiu kt qu quan
trng trong khoa hc cụng ngh.
Chớnh s phỏt trin ca khoa hc cụng ngh, s cn thit ca cỏc thit b
cụng ngh cao, cỏc thnh cụng v hn ch ca cỏc thit b, ó lụi cun tụi i
vo tỡm hiu vi mc ớch mun hiu rừ hn v cm bin o vn tc gúc, cỏc
kt cu ca nú, cỏc kt qu v hn ch, nhm tỡm ra phng hng khc phc
hon thin hn cho cu trỳc ca cm bin. Cựng vi tinh thn ham hc hi,
s am mờ khỏm phỏ khoa hc v s ch bo, hng dn nhit tỡnh ca Thy
giỏo TS inh Vn Dng, TS. Trnh Quang Thụng cng nh s ng h nhit
3
Tháng 05 năm 2009
Khãa LuËn Tèt NghiÖp
Gi¸p V¨n Phíc
tình của các thầy cô và các bạn nên tôi đã lựa chọn đề tài: “Cảm biến đo vận
tốc góc MEMS”.
2. Mục đích nghiên cứu
Tìm hiểu và hệ thống hóa kiến thức về nguyên lý hoạt động cảm biến
đo vận tốc góc, các cấu trúc cơ bản của cảm biến đo vận tốc góc MEMS.
3. Đối tượng nghiên cứu
Cảm biến đo vận tốc góc MEMS.
4. Nhiệm vụ nghiên cứu
Tìm hiểu lý thuyết về lực Coriolit; Các cấu trúc của cảm biến đo vận
tốc góc: kết cấu, hoạt động, các ưu nhược điểm; Các hướng nghiên cứu.
5. Phương pháp nghiên cứu
Thu thập thông tin đã có về cảm biến, tổng hợp tài liệu báo cáo.
4
Th¸ng 05 n¨m 2009
Khãa LuËn Tèt NghiÖp
Gi¸p V¨n Phíc
PHẦN NỘI DUNG
CHƯƠNG 1
LỰC CORIOLIT VÀ CẢM BIẾN ĐO VẬN TỐC GÓC MEMS
1.1. Lực Coriolit
Như ta biết, vật đứng yên trong hệ quy chiếu quay thì chịu tác dụng của
lực quán tính li tâm. Lực quán tính này có hướng ngược với hướng của lực
hướng tâm nên gọi là lực quán tính li tâm hay gọi tắt là lực li tâm. Hiện tượng
li tâm được ứng dụng nhiều trong kĩ thuật, như trong máy quay li tâm, máy đo
vận tốc… Nếu vật chuyển động trong hệ quay thì ngoài chịu tác dụng của lực
li tâm vật còn chịu tác dụng của một lực quán tính khác nữa, lực quán tính
Coriolit hay gọi tắt là lực Coriolit Fc.
Lý thuyết và thực nghiệm cho biết lực Coriolit phụ thuộc vào vận tốc góc
của hệ quy chiếu quay, vào vận tốc v ' của vật đối với hệ quy chiếu quay
và luôn vuông góc với các véc tơ vận tốc đó (Hình 1.1). Biểu thức tổng quát
của lực Coriolit là:
Fc 2m v '
(1.1)
Hình1.1.Giatốc Corilit của vật chuyển động trong hệ quy chiếu quay.
5
Th¸ng 05 n¨m 2009
Khãa LuËn Tèt NghiÖp
Gi¸p V¨n Phíc
Để hình dung tác dụng của lực Coriolit và tìm biểu thức (1.1) ta lần lượt
khảo sát các nội dung sau đây:
1.1.1. Thí dụ phát hiện lực Coriolit. Lấy một đĩa nằm ngang có thể
quay quanh trục thẳng đứng qua tâm của nó.
Fc
A’
⃗′
O
v'
A
A
Hình 1.2. Quỹ đạo chuyển động của viên bi trên đĩa quay
dưới tác dụng của lực Coriolit
Vạch trên đĩa một bán kính OA. Theo hướng từ O đến A, ta cho quả
cầu lăn với vận tốc v’. Nếu đĩa không quay thì quả cầu lăn dọc theo bán kính
OA (hình 1.2). Nếu đĩa quay theo hướng mũi tên chẳng hạn, thì quả cầu sẽ lăn
theo đường cong OA’ (đường chấm chấm) nghĩa là vận tốc thay đổi hướng
đối với đĩa quay. Chuyển động cong của quả cầu trên mặt đĩa xẩy ra phải do
một lực nào đó tác dụng vuông góc với vận tốc v ' . Lực này là lực quán tính
Coriolit.
1.1.2. Biểu thức lực Coriolit tổng quát: Gọi Oxyz là hệ quy chiếu
đứng yên, O’x’y’z’ là hệ quy chiếu gắn với đĩa quay, trong đó trục x trùng với
trục z’ và trùng với trục của đĩa (Hình 1.3). Với quy ước này thì bán kính véc
tơ ⃗ của vật đối với hệ đứng yên và r ' đối với hệ quay là trùng nhau.
Bán kính véctơ của vật được tính theo:
r r ' x ' e ' x y ' e ' y z ' e 'z
6
(1.2)
Th¸ng 05 n¨m 2009
Khãa LuËn Tèt NghiÖp
Gi¸p V¨n Phíc
Trong đó e 'x , e ' y , e ' z là các vectơ đơn vị trên các trục tọa độ của hệ O’x’y’z’.
Các véctơ e 'x và e ' y quay theo hệ O’x’y’z’ với cùng vận tốc Ω, nghĩa là
chúng nằm yên đối với hệ này. Còn đối với hệ đứng yên Oxyz thì chúng quay
với vận tốc . Do đó khi lấy tích phân (1.2) đối với r thì phải coi e 'x và e ' y
như là hàm của thời gian t, có đạo hàm bằng:
e 'x e ' y ; e ' y e 'x
(1.3)
y’
e ' x
e ' y
e 'y
e 'x
z’
x’
Hình 1.3. Hệ tọa độ quay
và đạo hàm bậc hai bằng:
e 'x e ' y 2 e 'x
(1.4)
e ' y e 'x 2 e ' y
Ta bắt đầu tính gia tốc a của một vật chuyển động tùy ý. Sử dụng (1.2)
ta có:
Đối với hệ quay thì vận tốc v ' của vật là:
v ' r ' x ' e 'x y ' e ' y z ' e ' z
và gia tốc a ' sẽ là: a ' v ' xe 'x y e ' y z e 'z
7
(1.5)
(1.6)
Th¸ng 05 n¨m 2009
Khãa LuËn Tèt NghiÖp
Gi¸p V¨n Phíc
Đối với hệ đứng yên thì vận tốc v của vật là:
v r x ' e ' x x ' e ' x y ' e ' y y ' e ' y z ' e 'z
(1.7)
và gia tốc a sẽ là:
a v x ' e 'x 2 x ' e 'x x ' e ' x y e ' y 2 y ' e ' y y ' e ' y z e 'z
hay
Từ (1.3), (1.4), (1.6) suy ra (1.8) có dạng:
a a ' 2 ( x ' e 'x y ' e ' y ) 2 ( xe ' x ye ' y )
a a ' 2(v 'x e 'x v ' y e ' y ) 2 ( xe 'x ye ' y )
(1.8)
(1.9)
Biểu thức trong các dấu ngoặc ở số hạng cuối của (1.9) bằng thành
phần vuông góc với trục quay (trục z) của bán kính véctơ r ' (xem (1.2)). Ta
kí hiệu thành phần này là R do đó số hạng cuối cùng bằng 2 R .
Số hạng thứ hai của (1.9) là khai triển của tích véctơ 2( v ') . Thật
vậy, ta hãy biểu diễn tích véctơ này dưới dạng định thức:
e 'x
v ' x
v 'x
e 'y
y
v 'y
e 'z
z
v 'z
1.10
Chú ý thêm rằng Ωx = Ωy = 0 vì hệ quay quanh trục z với vận tốc Ω, do đó:
e 'x e ' y e 'z
v' 0
0
v 'x v ' y v 'z
F qt m( a ' a ) 2 m ( v ') m 2 R
8
1.11
1.12
Th¸ng 05 n¨m 2009
Khãa LuËn Tèt NghiÖp
Gi¸p V¨n Phíc
Như vậy hệ thức (1.7) có dạng:
a a ' 2 v' 2 R
1.13
Chú ý đến (1.3) ta tìm được lực quán tính tác dụng lên vật m là:
F qt m( a ' a ) 2m( v ') m 2 R
(1.14)
trong đó lực m 2 R có hướng từ tâm quay ra ngoài là lực quán tính li tâm
xuất hiện do sự quay của đĩa, còn lực 2m( v ') xuất hiện do có sự chuyển
động tương đối của vật với đĩa quay với vận tốc ⃗′ là lực quán tính Coriolit.
Vậy biểu thức tổng quát của lực Coriolit là:
FC 2m( v ')
hay
FC 2m(v ' )
(1.15)
Như vậy bằng các phép tính toán ta đã tìm ra biểu thức định lượng giá
trị của lực Coriolit và ta thấy lực Coriolit phụ thuộc vào vận tốc góc quay
và vận tốc chuyển động tương đối v ' .
Biểu hiện của lực Coriolit trong thực tế trong các hiện tượng tự nhiên
nhìn chung có giá trị nhỏ. Tuy nhiên nếu nó tác dụng trong thời gian dài thì
cũng đều gây ảnh hưởng. Lực giúp ta cắt nghĩa vì sao lại có hiện tượng bồi nở
sảy ra ở hai bờ sông… Hiện tượng này cũng xảy ra đối với đường ray xe lửa
một chiều. Lực Coriolit tác dụng lên cả chuyển động của các vật chuyển động
với vận tốc lớn như tàu thủy, máy bay, đường đạn, đặc biệt là các tên lửa, các
trạm vũ trụ phóng từ mặt đất.
9
Th¸ng 05 n¨m 2009
Khãa LuËn Tèt NghiÖp
Gi¸p V¨n Phíc
1.2. Cảm biến đo vận tốc góc MEMS dựa trên nguyên lý lực
Coriolit
1.2.1. Tổng quan về công nghệ MEMS
Vào thế kỷ XX, các thiết bị điện tử được tích hợp với số lượng ngày
càng lớn, kích thước ngày càng nhỏ và chức năng ngày càng được nâng cao.
Điều này đã mang lại sự biến đổi sâu sắc cả về mặt công nghệ lẫn xã hội. Vào
cuối những năm 50 của thế kỷ XX, một cuộc cách mạng hoá về công nghệ
micro đã diễn ra và hứa hẹn một tương lai cho tất cả các ngành công nghiệp.
Hệ thống vi cơ điện tử (Micro ElectroMechanical Systems) viết tắt là MEMS
cũng đã được ra đời và phát triển trong giai đoạn này.
Công nghệ vi cơ đã và đang tiến xa hơn nhiều so với nguồn gốc của nó
là công nghiệp bán dẫn. MEMS bao gồm những cấu trúc vi cơ, vi sensor, vi
chấp hành và vi điện tử cùng được tích hợp trên cùng một chip (on chip). Các
linh kiện MEMS thường được chế tạo từ silic. Một thiết bị MEMS thông
thường là một hệ thống vi cơ tích hợp trên một chip mà có thể kết hợp những
phần cơ chuyển động với những yếu tố sinh học, hoá học, quang hoặc điện.
Kết quả là các linh kiện MEMS có thể đáp ứng với nhiều loại lối vào: hoá,
ánh sáng, áp suất, rung động vận tốc và gia tốc... Với ưu thế có thể tạo ra
những cấu trúc cơ học nhỏ bé tinh tế và nhạy cảm đặc thù, công nghệ vi cơ
hiện nay đã cho phép tạo ra những bộ cảm biến (sensor), những bộ chấp hành
(actuator) được ứng dụng rộng rãi trong cuộc sống. Các bộ cảm biến siêu nhỏ
và rất tiện ích này đã thay thế cho các thiết bị đo cũ kỹ, cồng kềnh trước đây.
Tuy rằng MEMS mới ra đời chưa lâu nhưng đã có rất nhiều ứng dụng
góp phần không nhỏ vào sự phát triển đời sống xã hội.
Các ứng dụng phổ cập:
Các ứng dụng phổ cập nhất hiện nay của công nghệ MEMS trong các
ngành công nghiệp có thể tóm tắt như sau:
10
Th¸ng 05 n¨m 2009
Khãa LuËn Tèt NghiÖp
Gi¸p V¨n Phíc
Sensor áp suất: Kiểm tra tỷ lệ nhiên liệu và các chức năng đo đạc khác
khác trong ôtô, thiết bị đo huyết áp và các ứng dụng dân dụng khác.
Sensor gia tốc và gyroscope: Túi khí trong ôtô, thiết bị định hướng cho
tên lửa và các phương tiện vận tải.
Hiển thị: Các màn hình độ phân giải cao dùng các vi gương cho các
thiết bị điện tử .
Đầu phun mực: Hàng trăm triệu chip phun mực một năm cho các máy
in laser đen trắng và mầu.
Các sensor hoá học: Cho các mục đích y tế và y sinh học.
Chuyển mạch cho thông tin quang sợi: Internet, truyền hình và thông
tin giải rộng dùng cáp quang.
Vi van: Các hệ sắc kế khí cực nhỏ sử dụng các dãy vi van.
Chuyển mạch điện cơ: Các vi rơle trong các ứng dụng một chiều, xoay
chiều và vô tuyến.
11
Th¸ng 05 n¨m 2009
Khãa LuËn Tèt NghiÖp
Gi¸p V¨n Phíc
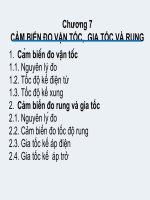
1.2.2 Vi cảm biến vận tốc góc MEMS
Vận tốc góc là mức độ thay đổi góc quay trong một đơn vị thời gian
(Hình 1.4).Vận tốc góc được xác định:
M’
d
d
dt
M
1.16
O
R
A
Hình 1.4. Sự thay đổi góc quay
Cảm biến vận tốc góc là thiết bị dùng để đo vận tốc góc. Ở đây ta sẽ
tìm hiểu về cảm biến động hồi chuyển sử dụng hiệu ứng lực Coriolit (Hình
1.5). Cảm biến động hồi chuyển sử dụng một khối proof-mass dao động theo
một phương được gọi là phương sơ cấp. Khối này đồng thời bị quay quanh
một trục, làm xuất hiện lực Coriolit khiến nó có thêm dao động theo phương
khác, gọi là phương thứ cấp. Trên phương chuyển động thứ cấp này có gắn
bản cực tụ điện để nhận biết sự thay đổi điện dung gây bởi chuyển động này,
và từ đó là vận tốc xoay.
Hình 1.5. Cấu trúc cảm biến sử dụng khối proof-mass
12
Th¸ng 05 n¨m 2009
Khãa LuËn Tèt NghiÖp
Gi¸p V¨n Phíc
Cảm biến được gắn trên vật chủ cần đo vận tốc góc, tín hiệu lấy ra từ
cảm biến được đưa qua bộ khuếch đại biên độ rồi cho qua bộ lọc, lọc tín hiệu
cần thiết rồi được đưa qua một máy tính xử lí tín hiệu cho kết quả đầu ra. Hệ
thống đo như sơ đồ (Hình 1.6):
Hình 1.6. Sơ đồ một hệ thống đo
Trên kết cấu của cảm biến người ta gắn các cơ cấu lái và cảm ứng là
các tụ điện thay đổi được điện dung hoặc các biến trở (Hình 1.7).
Hình 1.7. Cơ cấu khối proof-mass và cách đặt điện cực lái
và điện cực cảm ứng
13
Th¸ng 05 n¨m 2009
Khãa LuËn Tèt NghiÖp
Gi¸p V¨n Phíc
Với việc sử dụng cơ cấu lái và cảm ứng là các tụ điện ta có cơ cấu đo
chuyển động thứ cấp như sau (Hình 1.8):
Hình 1.8. Sơ đồ đo chuyển động thứ cấp
Tùy thuộc vào mục đích đo và điều kiện đo mà người ta xây dựng các
kết cấu khác nhau sao cho phù hợp nhất. Các kết cấu tiêu biểu đang được sử
dụng như: Cấu trúc turning-fork, cấu trúc khung dao động, cấu trúc cộng
hưởng vòng xuyến, cấu trúc cài răng lược. Sau đây ta sẽ đi tìm hiểu cụ thể về
các cấu trúc đó.
14
Th¸ng 05 n¨m 2009
Khãa LuËn Tèt NghiÖp
Gi¸p V¨n Phíc
CHƯƠNG 2
PHÂN LOẠI CẤU TRÚC CẢM BIẾN ĐO VẬN TỐC GÓC MEMS
2.1. Cấu trúc turning-fork:
Fcoriolit
Fdriver
Ω
Hình 2.1. Cấu trúc turning-fork
Kết cấu đã được sử dụng trong cảm biến đo mức độ biến đổi góc là một
kết cấu dạng dĩa (turning-fork) biểu diễn trên hình (2.1). Chân dĩa là các trục
dao động chế tạo bằng một loại hợp kim và có một hằng số biên độ được biểu
thị trước. Một trục quay thẳng đứng gắn với tay quay của dĩa. Khi có sự quay
quanh trục thẳng đứng của dĩa, bằng cách đặt cơ cấu lái thích hợp người ta
định hướng được lực lái có phương nằm trong mặt phẳng của dĩa. Khi đó xuất
hiện lực Corolit định hướng vuông góc với phương lực lái hay các kết quả của
gia tốc Coriolit được định hướng vuông góc với phương lái. Lực Coriolit có
thể được phát hiện từ độ cong của chân dĩa nhờ sự dao động ổn định của chân
dĩa hoặc từ sự dao động xoắn của thân dĩa thông qua sự biến đổi điện dung
của tụ điện cảm ứng hoặc sự biến thiên điện trở của biến trở cảm nhận.
Một bài toán về sự cảm nhận một biến đổi tốc độ góc của những cảm
biến căn cứ trên lực Coriolit là nhỏ hơn biên độ dao động, thí dụ cho một dao
động lái hình sin,
15
Th¸ng 05 n¨m 2009
Khãa LuËn Tèt NghiÖp
Gi¸p V¨n Phíc
x(t) = xosin(drivet)
(2.1.1)
với biên độ xo và tần số lái drive thì gia tốc coriolit được tính đạo hàm bậc
nhất của phương trình biên độ và bằng:
acorilit = 2Ω. ̇ (t) = 2Ωxodrivecos(drivet)
(2.1.2)
Chẳng hạn, cho biên độ lái xo = 1m, tần số lái drive = 20kHz và tốc độ thay
đổi góc quay là 1deg/s, có được biên độ của gia tốc Coriolit là 4,4 mm/s. Giả
sử dùng một chương trình thử nghiệm với hệ số phẩm chất Q = 1 và giữ
nguyên tần số cộng hưởng cùng giá trị tần số lái là 20kHz thì kết quả thu được
có độ sai lệch là 0,0003 nm. Từ đây ta cố hai phương án làm cho biên độ tăng
lên:
+ Tăng biên độ lái: Từ (2.1.2) chúng ta thấy gia tốc Coriolit không chỉ
tỉ lệ với mức độ thay đổi góc Ω mà cả biên độ lái xo. Chẳng hạn, khi tăng biên
độ lái ta có kết quả là sự tăng lên của độ nhạy. Có được biên độ dao động trên
50 m bằng cách sử dụng kích thích điện từ. Mặc dù như vậy có thể làm cho
tín hiệu đầu ra cao, sự tăng lên này liên quan đến tổng năng lượng tiêu thụ và
gây ra sự qua tải khi hoạt động trong thời gian dài.
+ Phối chọn sao cho tần số cộng hưởng bằng với tần số của mode lái
trong hệ thống với một hệ số phẩm chất. Từ (2.1.2), tác động đến gia tốc
Coriolit là biên độ biến điệu tín hiệu cùng với tần số lái drive. Đang chọn tần
số cộng hưởng của mode lái cho kết quả độ khuếch đại bằng hệ số phẩm chất
Q. Tuy nhiên, trong cùng khoảng thời gian chiều rộng dải tần bị giới hạn bởi
tỉ số drive/Q . Chẳng hạn, cho hệ số phẩm chất Q = 10000 thì chiều rộng dải
tần thu được chi cỡ vài Hz. Đạt được cả hai dải tần kích thích và tăng độ nhạy
tạo ra một yếu điểm là sự không khớp giữa mode tần số cộng hưởng và tần số
lái.
Đạt được biên độ lái cao dựa vào kích thích điện từ là lí luận mà chúng
tôi lựa chọn. Hình (2.2) trình diễn sơ đồ kết cấu chính của một vi từ kế dạng
16
Th¸ng 05 n¨m 2009
Khãa LuËn Tèt NghiÖp
Gi¸p V¨n Phíc
turning-fork dựa trên kiểu kích từ. Cố định một từ trường tĩnh sao cho có
được đường cảm ứng vuông góc với bề mặt khung. Cho một dòng xoay chiều
chạy qua khung trên mạch silic được kết cấu đặt giữa hai lớp thủy tinh bọc,
dòng xoay chiều này chịu tác dụng của lực loren đóng vai trò lực lái. Sự dao
động, kết quả từ gia tốc Coriolit là cảm biến điện dung sử dụng các bản điện
cực trên đế thủy tinh.
Ω
Ω
a)
b)
Hình 2.2. Cấu trúc turnig-fock sử dụng trong cảm ứng mức độ thay đổi góc
với (a) hai đầu cố định (b) một đầu cố định
Tần số cộng hưởng của thành phần lái và mode cảm ứng chúng ăn khít nhau
với sự giúp đỡ của việc phân tích phần tử hữu hạn ( FEM). Một kiểu kết cấu
đơn với một đầu có định hình (2.2.b) yêu cầu một sự gia công kim loại trên
khung một kết cấu cứng. Tuy nhiên, kết cấu có một vài ưu điểm so với kết
cấu hai đầu cố định, điều quan trọng là hệ số phẩm chất cao hơn bởi vì giảm
được sự tổn thất trong thiết bị phụ cụ thể là giá treo và giảm sự ảnh hưởng do
ứng suất trong quá trình đóng gói và do sự thay đổi nhiệt độ. Một sự quay dọc
theo chiều lấy tín hiệu ra tạo ra độ nghiêng của kết cấu, ở đây cảm biến sử
dụng điện cực của tụ điện gắn trên đế của kết cấu. Giống như kết cấu trên
hình (2.2.b), đó là kết cấu một đầu cố định với đế trên một hướng có rất nhiều
17
Th¸ng 05 n¨m 2009
Khãa LuËn Tèt NghiÖp
Gi¸p V¨n Phíc
lợi ích quan trọng, lợi ích về độ nhạy cơ học và nhiệt ứng suất bắt nguồn từ đế
và quá trình đóng gói.
a) Ưu điểm của cấu trúc:
Cấu trúc đơn giản dễ chế tạo. Sự điều khiển cũng đơn giản, việc tạo
ra sự cộng hưởng cũng đơn giản nhờ việc thay đổi tần số lái.
b) Nhược điểm của cấu trúc:
Có chuyển động cơ trong cấu trúc nên không thể tránh khỏi ma sát,
chính điều này gây ra một tuế sai.
Muốn đạt được tín hiệu đầu ra cao thì phải tốn nhiều năng lượng
kích thích và điều này cũng gây ra sự qua tải cho kết cấu khi hoạt động
trong thời gian dài.
Để có được dải tần kích thích rộng và tăng độ nhạy điều này lại tạo
ra một yếu điểm là sự không ăn khớp giữa mode tần số cộng hưởng và
mode lái.
18
Th¸ng 05 n¨m 2009
Khãa LuËn Tèt NghiÖp
Gi¸p V¨n Phíc
2.2. Cấu trúc khung dao động
Hình 2.3. Cấu trúc khung dao động
Đây là cấu trúc động hồi chuyển sử dụng hai khung dao động như biểu
diễn trên hình (2.3). Cấu trúc này đạt được sự hiệu quả của khung dao động
và tính thụ động của khung là dao động độc lập với trục quay. Ở đây ta sử
dụng cảm biến như một bản mỏng gắn với khung thụ động dao động bằng hai
mấu xoắn và khung còn lại dao động độc lập gắn với đế bởi hai neo thông qua
dầm xoắn. Khung chủ động được lái bởi điện cực lái gắn trên đế. Biên độ dao
động rộng của khung bị động bao gồm cả cảm biến mỏng, có thể đạt được
nhờ khuếch đại sự dao động nhỏ của khung chủ động. Trong kênh đã chọn
trước của chế độ đầu vào và với mức độ nhạy bình thường. Chỉ có cảm biến
bản mỏng mới đáp ứng được sự quay được gây ra bởi lực Coriolit: Dưới sự
tác động hay điều khiển của điện cực lái tạo ra sự dao động của khung chủ
động tại hai mấu, sự liên kết giữa hai khung bằng dầm xoắn lại tạo ra sự dao
động của khung bên trong cũng tại dầm liên kết, một cảm biến mỏng dạng
chữ nhật gắn với khung bên trong với hai mấu, sự dao động của khung thứ hai
tạo ra sự dao động của cảm biến mỏng tại hai mấu đó. Tần số dao động của
bản mỏng gắn cảm biến bằng với tần số lái. Hai phía đầu chữ nhật của cảm
biến có gắn điện cực cùng với các bản cực gắn trên đế tạo ra các tụ điện thay
19
Th¸ng 05 n¨m 2009
Khãa LuËn Tèt NghiÖp
Gi¸p V¨n Phíc
đổi về điện dung khi có sự dịch chuyển của điện cực gắn trên cảm biến khi
cảm biến dao động, cực gắn trên đế có nhiệm vụ cảm nhận sự thay đổi đó.
a) Ưu điểm của cấu trúc:
Việc lái và điều khiển có thể thực hiện rễ ràng nhờ vào tác dụng của
lực tĩnh điện thông qua các cực lái.
Việc xử lí tín hiệu đầu ra cũng được thực hiện rễ ràng qua việc xử lí
tín hiệu điện.
b) Nhược điểm của cấu trúc:
Có chuyển động cơ trong cấu trúc nên không thể tránh khỏi ma sát,
chính điều này gây ra một tuế sai.
Để tạo ra được sự dao động mềm mại trên các dầm nối, các Dầm và
Khung phải được chế tạo bằng các vật liệu đặc biệt và công nghệ chế
tạo đặc biệt.
20
Th¸ng 05 n¨m 2009
Khãa LuËn Tèt NghiÖp
Gi¸p V¨n Phíc
2.3. Cấu trúc cộng hưởng vòng xuyến
Hình 2.4. Cấu trúc vòng xuyến
Cấu trúc (Hình 2.4): Bao gồm một đai là khung vòng xuyến được đỡ
bởi tám nửa vành tròn, tám nửa vành tròn này có tác dụng như các nhíp lò xo
có thể uốn cong rồi lại trở về hình dạng nửa tròn, chính điều này giúp cho đai
có thể uốn một cách nhịp nhàng. Một số lượng lớn điện cực lái và điện cực
cảm ứng được gắn vòng quanh cấu trúc. Đai được truyền động tĩnh điện nhờ
chính các điện cực gắn xung quanh đai và uốn định hình kiểu elip với biên độ
nhất định trong cùng mặt phẳng. Khi chủ thể quay tròn theo phương đi qua
tâm đai lực coriolit gây ra công tạo ra sự truyền từ mode ban đầu sang mode
uốn cấp hai theo phương hợp với phương ban đầu góc 450 (Hình 2.5). Biên độ
của dao động cấp hai là, lấy theo tỉ lệ mức độ thay đổi góc quay và điện dung
biến đổi. Dao động của kết cấu đai có sự quan trọng đối với các thao tác trên
đường bao. Mode lái và mode cảm ứng là những yếu tố chính, một điều rất tốt
là việc xử lí tần số cộng hưởng có được kết quả trong dải độ nhạy rộng, điều
21
Th¸ng 05 n¨m 2009
Khãa LuËn Tèt NghiÖp
Gi¸p V¨n Phíc
này giúp ta rễ ràng chọn ra tần số cộng hưởng phù hợp nhất cho hoạt động
của cảm biến và việc thu lấy tín hiệu đầu ra.
Hình 2.5. Biểu thị sự uốn của đai dưới tác dụng của lực coriolit
Trên kết cấu của toàn bộ đai có sự không ăn khớp tần số trên các phần
khối lượng hoặc sự biểu hiện không bền vững khi dao động trong công nghệ
chế tạo có thể được bù tĩnh điện bằng việc áp dụng thích ứng điện áp lệch trên
các bản cực xung quanh kết cấu.
22
Th¸ng 05 n¨m 2009
Khãa LuËn Tèt NghiÖp
Gi¸p V¨n Phíc
Hình 2.6. Hình ảnh cấu trúc thực
a) Ưu điểm của cấu trúc
Rễ ràng chọn ra tần số cộng hưởng phù hợp nhất cho hoạt động
của cảm biến và việc thu lấy tín hiệu đầu ra.
Việc lái và điều chỉnh dao động thực hiện rễ ràng nhờ các điện
cực xung quanh kết cấu.
b) Nhược điểm của cấu trúc
Có chuyển động cơ trong cấu trúc nên không thể tránh khỏi ma sát,
chính điều này gây ra một tuế sai.
Công nghệ chế tạo phức tạp, cần tạo ra sự chính xác về mặt đối
xứng đảm bảo cho vành dao động trong mặt phẳng tương đối.
23
Th¸ng 05 n¨m 2009
Khãa LuËn Tèt NghiÖp
Gi¸p V¨n Phíc
2.4. Cấu trúc cài răng lược
Hình 2.7. Cấu trúc cài răng lược
Cấu trúc (Hình 2.7) sử dụng đồng thời hai sự dịch chuyển của cả thành
phần lái và thành phần cảm ứng trong cùng một mặt phẳng. Cấu trúc lái là bộ
phận truyền động bởi lược lái, cấu tạo bởi hệ thống các điện cực xen kẽ nhau
giống như các răng lược. Cấu trúc cảm ứng và cấu trúc lái được ghép với
nhau bởi bốn lò xo cảm ứng, bốn lò xo mềm này cảm nhận sự lắc của khung
lái sẽ tạo ra sự lắc cảm ứng của khối cảm ứng. Khung lái được gắn với đế bởi
bốn neo thông qua các lò xo. Sự dao động của cảm biến được uốn định hướng
theo trục dọc của cảm biến. Kết quả của gia tốc Coriolit tỉ lệ với sự lái quay.
Khi có sự quay của cả hệ thống, lúc đó sẽ có sự dao động của khung lái
được điều khiển bởi các điện cực lái, nhờ sự liên kết mềm với khung lái mà
bệ cảm ứng cũng sảy ra sự dao động, mức độ dao động được cảm nhận bởi sự
24
Th¸ng 05 n¨m 2009
Khãa LuËn Tèt NghiÖp
Gi¸p V¨n Phíc
thay đổi tín hiệu điện trên các bản tụ trong bệ cảm ứng. Từ đó lấy được kết
quả của mức độ thay đổi góc thông qua gia tốc Coriolit.
a) Ưu điểm của cấu trúc
Cấu trúc thể hiện được tính ưu việt của sự lái và cảm ứng.
b) Nhược điểm của cấu trúc
Có chuyển động cơ trong cấu trúc nên không thể tránh khỏi ma
sát, chính điều này gây ra một tuế sai.
Công nghệ chế tạo phức tạp, đòi hỏi cao cho các chi tiết nhạy
cảm.
25
Th¸ng 05 n¨m 2009
Khãa LuËn Tèt NghiÖp
Gi¸p V¨n Phíc
CHƯƠNG 3
CÁC HƯỚNG NGHIÊN CỨU ĐANG PHÁT TRIỂN
3.1. Phát triển cấu trúc cảm biến mới
Cùng với sự phát triển mạnh như vũ bão của khoa học công nghệ, đã tạo
ra nhu cầu phát triển mạnh mẽ của các ngành kĩ thuật, chế tạo v.v… Dĩ nhiên,
công nghệ chế tạo các loại cảm biến nói chung và công nghệ chế tạo cảm biến
đo vận tốc góc nói riêng cũng không nằm ngoài quy luật của sự phát triển.
Các loại cảm biến hiện nay được ứng dụng trong rất nhiều các lĩnh vực khác
nhau và có rất nhiều đóng góp quan trọng cho sự phát triển chung của toàn xã
hội. Tuy nhiên, chính sự phát triển mạnh mẽ của khoa học công nghệ lại đặt
ra một yêu cầu cấp thiết đối với lĩnh vực cảm biến là cần phải có những cấu
trúc mới, mới đảm bảo được nhu cầu ứng dụng ngày càng phong phú và hiện
đại. Nói về cảm biến đo vận tốc góc, hiện nay các cấu trúc đang được sử dụng
nhiều như: Turning-fock; Khung dao động; Cộng hưởng vòng xuyến và cấu
trúc cài răng lược, tuy đã có nhiều thành công nhưng cũng không thể tránh
khỏi những hạn chế nhất định là do kết cấu hoặc do công nghệ chế tạo mà khi
hoạt động trong những điều kiện nhất định đã tạo ra. Để khắc phục phần nào
những hạn chế của những kết cấu đã có người ta đã xây dựng lên các kết cấu
mới trên cơ sở đó. Dưới đây sẽ giới thiệu một số kết cấu sau:
Sự dao động hài hòa giữa hai khối proof-mass nhờ vào sự liên kết các
điện cực lái giữa hai khối này được sử dụng trong kết cấu như hình vẽ (Hình
3.1). Khi có sự quay của cả khối quanh trục z, vận tốc góc được định
hướng theo phương oz, lực lái được định hướng theo phương ox là lực tĩnh
điện được tạo ra từ các điện cực lái tạo ra sự dịch chuyển theo phương này,
lực coriolit xuất hiện theo phương oy tạo ra mode dao động thứ hai của hai
khối proof-mass theo phương này, mức độ dao động của hai khối đó tỉ lệ với
26
Th¸ng 05 n¨m 2009
Khãa LuËn Tèt NghiÖp
Gi¸p V¨n Phíc
hạng của sự quay và được cảm nhận bằng các điện cực cảm ứng. Một kết cấu
tương tự như hình vẽ (hình 3.2).
HÌnh 3.1. Kết cấu Mode-Matched Tuning Fork Gyroscope (M2-TFG)
Hình 3.2. Kết cấu sử dụng hai khối proof-mass được liên kết dao động
bằng các tụ điện
27
Th¸ng 05 n¨m 2009