thiết kế hệ truyền động cho cân bằng định lượng, chương 4 ppt
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (151.14 KB, 6 trang )
Chng 4:
Hệ truyền động điện động cơ KĐB dùng
ph-ơng pháp điều chỉnh tần số
Động cơ không đồng bộ ba pha (KĐB) đ-ợc sử dụng rộng rãi
trong công nghiệp từ công suất nhỏ đến công suất trung bình và
chiếm tỷ lệ rất lớn so với các động khác. Trong thời gian gần đây,
do sự phát triển cao của công nghệ chế tạo bán dẫn công suất và kỹ
thuật điện tử - tin học, động cơ KĐB mới khai thác các -u điểm của
mình. Nó trở thành hệ truyền động cạnh tranh có hiệu quả với hệ
truyền động T-Đ.
Ph-ơng pháp điều chỉnh tốc độ động cơ bằng cách biến đổi tần
số nguồn cho phép mở rộng phạm vi sử dụng động cơ KĐB trong
nhiều ngành công nghiệp. Nó cho phép mở rộng dải điều chỉnh tốc
độ và nâng cao tính chất động học của hệ thống điều chỉnh tốc độ
động cơ xoay chiều nói chung và động cơ KĐB nói riêng, có thể
ứng dụng cho các thiết bị cần thay đổi tốc độ nhiều động cơ cùng
một lúc nh- các truyền động của nhóm máy dệt, băng tải, bánh lăn
hoặc cho cả các thiết bị đơn lẻ nhất là những cơ cấu có yêu cầu
tốc độ cao nh- máy ly tâm, máy mài Đặc biệt là hệ thống điều
chỉnh tốc độ động cơ bằng cách biến đổi nguồn cung cấp sử dụng
cho động cơ không đồng bộ rotor lồng sóc sẽ có kết cấu đơn giản
vững chắc, giá thành hạ và có thể làm việc trong nhiều môi tr-ờng.
Nh-ợc điểm cơ bản của hệ thống này là sơ đồ mạch điều khiển rất
ĐK
Biến tần
~3
ĐK
~
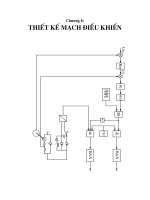
Hình 2.4.
Sơ đồ nguyên lý hệ TĐĐ
-
ĐK điều chỉnh tần số.
phức tạp. Đối với hệ thống này, động cơ không nhận điện từ l-ới
chung mà từ một bộ biến tần. Bộ biến tần này có khả năng biến đổi
tần số và điện áp ra một cách độc lập với nhau. Th-ờng sử dụng hai
loại biến tần trong việc điều chỉnh tốc độ là biến tần trực tiếp và
biến tần gián tiếp (có sử dụng khâu trung gian một chiều). Hệ
truyền động điện có thể sử dụng bộ biến tần trực tiếp hoặc gián tiếp
ba pha, cũng có thể dùng bộ biến đổi một chiều-xoay chiều thay
đổi tần số một pha hay ba pha.
3.1 Biến tần trực tiếp (cycloconverter)
Có sơ đồ cấu trúc đơn giản hình 2.5 a. Điện áp vào xoay chiều u
1
(tần số f
1
) chỉ cần qua một mạch van là chuyển ngay ra tải với tần
số khác. Vì vậy, loại biến tần này có hiệu suất biến đổi năng l-ợng
cao do chỉ có một lần biến đổi điện năng và cho phép thực hiện
hãm tái sinh năng l-ợng mà không cần có mạch điện phụ. Đồng
thời, cũng có thể dễ dàng thực hiện điều chỉnh điện áp và tần số
đầu ra của biến tần trực tiếp với dạng sóng điện áp gần hình sin.
Tuy nhiên, sơ đồ mạch van khá phức tạp, số l-ợng van lớn đối với
mạch ba pha. Việc thay đổi tần số ra f
2
khó khăn và phụ thuộc vào
tần số vào f
1
, số pha đầu vào của nguồn và số khoảng dẫn của các
van ở mỗi nhóm van.
Vì thế, hiện nay chủ yếu sử dụng loại biến tần này với phạm vi
điều chỉnh tần số
f
2
f
1
. Mặc dù về nguyên tắc, có thể tạo biến tần
với
f
2
f
1
nh-ng mức
độ phức tạp sẽ tăng lên rất nhiều. Biến tần trực tiếp hay đ-ợc dùng
cho truyền động điện công suất lớn, tốc độ làm việc thấp, thí dụ để
cung cấp cho các động cơ rotor lồng sóc, các động cơ rotor dây
quấn cấp bởi hai nguồn, các động cơ đồng bộ
U
1
, f
1
~
Mạch van
~
U
2
, f
2
a)
b)
U
1
, f
1
~
Chỉnh
l-u
Lọc
Nghịch l-u
độc lập
~
U
2
, f
2
U
=
U
=
Hình 2. 5. Cấu trúc biến tần trực tiếp (a) và Biến tần gián tiếp(b)
3.2. Biến tần gián tiếp (có khâu trung gian ) nghịch l-u độc
lập
Sơ đồ cấu trúc đ-ợc trình bày trên hình 2.5b. Trong loại biến tần
này, điện áp xoay chiều đầu tiên đ-ợc chuyển thành điện áp một
chiều nhờ bộ chỉnh l-u, sau đó đi qua bộ lọc rồi mới trả về điện áp
xoay chiều với tần số
f
2
. Việc biến đổi năng l-ợng hai lần làm giảm
hiệu suất biến tần. Song, loại biến tần này cho phép thay đổi dễ
dãng tần số ra
f
2
không phụ thuộc vào tần số vào f
1
trong một dải
rộng cả trên và d-ới
f
1
vì tần số ra chỉ phụ thuộc vào mạch điều
khiển. Hơn nữa, với sự ứng dụng hệ điều khiển số nhờ kỹ thuật vi
xử lý và dùng van lực là các loại transistor đã cho phép phát huy tối
đa các -u điểm của loại biến tần này. Vì vậy, đa số các biến tần
hiện nay là biến tần nghịch l-u độc lập với nguồn cung cấp là
nguồn dòng hoặc nguồn áp. Tuy nhiên, nếu sử dụng van thyristor
vẫn còn một số khó khăn nhất định khi giải quyết vấn đề khoá van.
Biến tần nguồn dòng: Trong các hệ truyền động điện điều
chỉnh động cơ xoay chiều, nguồn dòng th-ờng đ-ợc sử dụng cho
các hệ thống công suất lớn và có sơ đồ cầu ba pha, trong đó các van
bán dẫn là các van điều khiển hoàn toàn. Sơ đồ đơn giản, làm việc
tin cậy, đ-ợc sử dụng rộng rãi để điều khiển tốc độ động cơ xoay
chiều 3 pha rotor lồng sóc.Biến tần nguồn dòng có -u điểm là tăng
đ-ợc công suất đơn vị máy, mạch lực đơn giản mà vẫn thực hiện
hãm tái sinh động cơ. Khi làm việc với tải là động cơ xoay chiều
thì điện áp tải có xuất hiện các xung nhọn tại các thời điểm chuyển
mạch dòng điện chuyển mạch giữa các pha. Trong thực tế, th-ờng
sử dụng các van điều khiển không hoàn toàn, vì vậy cần có các
mạch khoá c-ỡng bức các van đang dẫn, bảo đảm chuyển mạch
dòng điện giữa các pha một cách chắc chắn trong phạm vi điều
chỉnh tần số và dòng điện đủ rộng.
Biến tần nguồn áp: Nghịch l-u điện áp có đặc điểm dạng
điện áp ra tải đ-ợc định hình sẵn còn dạng dòng điện ra tải lại phụ
thuộc vào tính chất tải. Nguồn áp đ-ợc tạo ra bằng một bộ chỉnh
l-u với đầu ra đ-ợc nối song song với một tụ điện có giá trị đủ lớn
để đảm bảo điện áp nguồn ít bị thay đổi và để trao đổi công suất
phản kháng với điện cảm tải của động cơ. Điện áp ra của nghịch
l-u điện áp không có dạng hình sin mà đa số là dạng xung chữ
nhật. Việc điều chỉnh tần số điện áp ra trên tải đ-ợc thực hiện dễ
dàng bằng điều khiển qui luật mở van của phần nghịch l-u. Ph-ơng
pháp điều khiển này thay đổi dễ dàng tần số mà không phụ thuộc
vào l-ới điện.
Đặc điểm của ph-ơng pháp điều khiển động cơ KĐB roto
lồng sóc bằng thiết bị biến tần nguồn áp
Với điện áp không đổi ,khi điều chỉnh tần số từ thông trong máy
sẽ thay đổi theo .Cụ thể là khi tăng tần số thì từ thông trong máy sẽ
giảm ,khi đố muốn giũ mômen không đổi thì phải tăng dòng điện
lên,làm cho động cơ quá tải về dòng.Ng-ợc lại hi giảm tần số thì từ
thông trong trong máy tăng len và mạch từ bị bão hoà,điều đó dẫn
đến tăng dòng từ hoá ,tăng tổn hao sắt từ và đốt nóng máy điện.
Vì vạy khi điều chỉnh tần số cần phải điều chỉn cả điện apsddawtj
vào dây quấn stato để đạt đ-ợc chế độ làm việc tối -u.Đối với hệ
thống biến tần ngồn áp th-ờng có yeu cầu giữ cho khả năng quá tải
về momen là không đổi:
th
M
M
l
= =
conts
Với đặc tính cơ can máy sản xuất là:
0
0
c
dm
dm
w
M M
w
ổ ử
ữ
ỗ
ữ
=
ỗ
ữ
ỗ
ữ
ữ
ỗ
ố ứ
Ta có luật điều chỉn điện áp:
1 / 2
1 1
1
X
dm dm
U f
U f
+
ổ ử
ữ
ỗ
ữ
=
ỗ
ữ
ỗ
ữ
ữ
ỗ
ố ứ
muốn xác định đ-ợc luật điều chỉnh nayfta phái xác định đ-ợc đặc
tính cơ can máy sản xuất .Việc đó th-ờng khó và không chính xác.
Ph-ơng pháp điều khiển véc tơ mà ta chọn làm ph-ơng án thiết kế
sẽ đáp úng đ-ợc mọi điều kiện vơi chế độ làm việc tối -u nhất
Kết luận :
Trong hệ thống truyền động điện điều khiển tần số,
ph-ơng pháp điều khiển theo từ thông rôto có thể tạo ra cho
động cơ các đặc tính tĩnh và động tốt. Các hệ thống điều
khiển điện áp/ tần số và dòng điện/ tần số tr-ợt đã đ-ợc ứng
dụng rộng rãi trong công nghiệ
Để truyền động cho hệ thống cân băng định l-ợng ta sử dụng
ph-ơng pháp điều chỉnh tần số cho động cơ điện KĐB roto lồng
sóc bằng thiết bị biến tần nguồn áp
Điều khiển vectơ động cơ không đồng bộ
Một số hệ thống yêu cầu chất l-ợng điều chỉnh động cao
thì các ph-ơng pháp điều khiển kinh điển khó đáp ứng đ-ợc.
Hệ thống điều khiển định h-ớng theo từ tr-ờng còn gọi là
điều khiển vectơ, có thể đáp ứng các yêu cầu điều chỉnh
trong chế độ tĩnh và động.Nguyên lý điều khiển vectơ dựa
trên ý t-ởng điều khiển vectơ động cơ không đồng bộ t-ơng
tự nh- điều khiển động cơ một chiều. Ph-ơng pháp này đáp
ứng đ-ợc yêu cầu điều chỉnh của hệ thống trong quá trình
quá độ cũng nh- chất l-ợng điều khiển tối -u mômen. Việc
điều khiển vectơ dựa trên định h-ớng vectơ từ thông rôto có
thể cho phép điều khiển tách rời hai thành phần dòng stator,
từ đó có thể điều khiển độc lập từ thông và mômen động cơ.
Kênh điều khiển mômen th-ờng gồm một mạch vòng điều
chỉnh tốc độ và một mạch vòng điều chỉnh thành phần dòng
điện sinh mômen. Kênh điều khiển từ thông th-ờng gồm một
mạch vòng điều chỉnh dòng điện sinh từ thông. Do đó hệ
thống truyền động điện động cơ không đồng bộ có thể tạo
đ-ợc các đặc tính tĩnh và động cao, có thể so sánh đ-ợc với
động cơ một chiều.