ĐỒ ÁN Máy Khắc Laser ĐIỀU KHIỂN BẰNG PLC.pptx
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (4.94 MB, 31 trang )
<span class="text_page_counter">Trang 2</span><div class="page_container" data-page="2">
<b> Lê Đăng Khoa 191105054419DTDA2</b>
<small>TP. Hồ Chí Minh Ngày 27 tháng 08 năm 2023.</small>
</div><span class="text_page_counter">Trang 3</span><div class="page_container" data-page="3"><small>Lê Đức AnhLớp: 19DTDA2Mssv: 1911050197</small>
<small>Vũ Việt AnhLớp: 19DTDA2Mssv: 1911050624</small>
<small>Lê Đăng Khoa Lớp: 19DTDA2Mssv: 1911050544</small>
<b>Sinh viên thực hiện</b>
GVHD: Th.S Nguyễn Vạn Quốc
</div><span class="text_page_counter">Trang 4</span><div class="page_container" data-page="4"><b>NỘI DUNG TRÌNH BÀY</b>
<b>I</b> <sup>•</sup> <b><sup> LÝ DO CHỌN ĐỀ TÀI</sup></b></div><span class="text_page_counter">Trang 5</span><div class="page_container" data-page="5"><b>1. LÝ DO CHỌN ĐỀ TÀI</b>
•
Sử dụng phương pháp thủ công tiêu tốn thời gian và cơng sức, hiệu quả mang lại thấp.•
Giải quyết được tình trạng khắc thủ cơng•
Chạy ổn định trong nhiều môi trường.</div><span class="text_page_counter">Trang 6</span><div class="page_container" data-page="6"><b>II. TỔNG QUAN VÀ MỤC TIÊU</b>
<b><small>Thực hiện nghiên cứu tổng quan về máy khắc laser </small></b>
<b><small>Nghiên cứu tính thực tế của hệ thống </small></b>
<b><small>Đưa ra ý tưởng thiết kế khả thi và thống nhất để chế tạo mơ hình thiết lập một cách đồng nhất hiệu quả nhất.</small></b>
<b><small>Tính tốn và lựa chọn được thiết bị phù hợp với mơ hình.</small></b>
<b><small>Lập trình và thiết kế được giao diện điều khiển. </small></b>
<b><small>Hồn thành mơ hình máy khắc laser điều khiển bằng PLC , theo phương án khoa học nhất.</small></b>
<b><small>3</small></b>
</div><span class="text_page_counter">Trang 7</span><div class="page_container" data-page="7"><b>Quy Trình Thiết Kế Mơ Hình</b>
<b><small>Tìm hiểu tổng quan </small></b>
<b><small>máy khắc Laser</small></b>
<b><small>Tính tốn thiết kế, chế tạo phần cơ khí mơ hình.</small></b>
<b><small>Tính tốn thiết kế phần điện của mơ hình</small></b>
<b><small>Khảo sát linh kiện điện, thiết bị điều </small></b>
<b><small>Thi công đấu nối đi dây điện, điều khiển.Thi cơng lắp ráp </small></b>
<b><small>hồn thiện mơ hình.Lập trình thiết kế </small></b>
<b><small>giao diện điều khiển mơ hình.</small></b>
<b><small>Kiểm tra thực nghiệm mơ hình và hồn </small></b>
<b><small>Thiết kế bằng phần </small></b>
<b><small>mềm 3D</small></b>
</div><span class="text_page_counter">Trang 8</span><div class="page_container" data-page="8"><b>Phần cơ khí:</b>
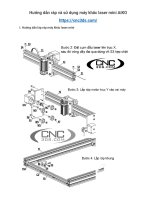
<b><small>CƠ CẤU TRỤC X</small></b>
<small>Bản vẽ 3D tổng thể mơ hình </small>
</div><span class="text_page_counter">Trang 9</span><div class="page_container" data-page="9"><b>Phần cơ khí:</b>
<b><small>CƠ CẤU TRỤC Y</small></b>
<small>Bản vẽ 3D </small>
</div><span class="text_page_counter">Trang 10</span><div class="page_container" data-page="10"><b>Phần cơ khí:</b>
<b><small>CỤM DI CHUYỂN LASER</small></b>
<small>Bản vẽ 3D .</small>
</div><span class="text_page_counter">Trang 11</span><div class="page_container" data-page="11"><b>Phần cơ khí:</b>
<b>4. THIẾT KẾ MƠ HÌNH</b>
<b><small>Mơ hình hồn thiện</small></b>
<small>Bản vẽ 3D tổng thể mơ hình.</small>
</div><span class="text_page_counter">Trang 12</span><div class="page_container" data-page="12"><b>Phần điện.</b>
<small>Bản vẽ 2D tủ điện của mơ hình.</small>
<small>Bên trong tủ điện của mơ hình.</small>
<small>Bên ngồi tủ điện</small>
<b><small>Tủ điện của mơ hình.</small></b>
<small>Bên trong tủ điện</small>
</div><span class="text_page_counter">Trang 13</span><div class="page_container" data-page="13"><b>III. THIẾT KẾ VÀ THI CÔNG </b>
<b><small>Sơ đồ khối mơ hình.</small></b>
</div><span class="text_page_counter">Trang 14</span><div class="page_container" data-page="14"><b>MẠCH ĐỘNG LỰC</b>
</div><span class="text_page_counter">Trang 15</span><div class="page_container" data-page="15"><b>MẠCH ĐIỀU KHIỂN</b>
</div><span class="text_page_counter">Trang 16</span><div class="page_container" data-page="16"><b>Phần giao diện điều khiển.</b>
<b>GIAO DIỆN ĐIỀU KHIỂN</b>
<small>.</small>
</div><span class="text_page_counter">Trang 17</span><div class="page_container" data-page="17"><b>Lưu đồ giải thuật </b>
<b>chạy AUTO</b>
</div><span class="text_page_counter">Trang 18</span><div class="page_container" data-page="18"><b>Lưu đồ giải thuật chạy MANUAL</b>
</div><span class="text_page_counter">Trang 19</span><div class="page_container" data-page="19"><b>LƯU ĐỒ GIẢI THUẬT </b>
<b>XỬ LÝ DỮ LIỆU</b>
<small>Kết thúc</small>
</div><span class="text_page_counter">Trang 20</span><div class="page_container" data-page="20"><b>Quy Trình Xử Lý Ảnh Tạo GCODE</b>
</div><span class="text_page_counter">Trang 21</span><div class="page_container" data-page="21"><b>Tính tốn chạy vi bước</b>
- Cài đặt diver TB6600 vi bước 1/32 = 6400 bước.-Bộ Chuyển động truc X và Y sử dụng Puly GT2 40
răng, mỗi rang 2mm :
Khi Puly chuyển động 1 vòng: 2 x 20mm =40mm- 1 góc khi động cơ quay: 40/6400 = 0.00625 độ
-Tính tốn xung điều khiển động cơ trục X và YStep X = ( Tọa độ X_new – Tọa độ X) / 0.00625Step Y = ( Tọa độ Y_new – Tọa độ Y) / 0.00625
</div><span class="text_page_counter">Trang 22</span><div class="page_container" data-page="22"><b>CHẠY THỰC NGHIỆM</b>
</div><span class="text_page_counter">Trang 23</span><div class="page_container" data-page="23"><b>Phân tích CHẠY THỰC NGHIỆM</b>
Tính xung cho trục X18.205 – 18.625 = - 0.41
Tính xung cho trục Y15.298 – 14.495 = 0.803
Nếu stepX >0 động cơ quay thuận
Nếu stepY <0 động cơ quay nghịch
Tương tự trục Y
</div><span class="text_page_counter">Trang 24</span><div class="page_container" data-page="24"><b>4. KẾT QUẢ ĐẠT ĐƯỢC</b>
<small>Giới Hạn chiều dài và chiều rộng khổ cắt</small>
<small>Xác định tọa độ ban đầu</small>
<small>-Tọa độ trục X-Tọa độ trục Y-Z0 xác định laser</small>
</div><span class="text_page_counter">Trang 25</span><div class="page_container" data-page="25"><b>CẮT Ở 3 TỐC ĐỘ</b>
<b>3 x </b>
</div><span class="text_page_counter">Trang 26</span><div class="page_container" data-page="26"><b>Phân tích CHẠY THỰC NGHIỆM</b>
</div><span class="text_page_counter">Trang 27</span><div class="page_container" data-page="27">Tính xung cho trục X115.984 – 115.951 = 0.033
Tính xung cho trục Y42.337 – 42.726 = 0.399
Nếu stepX >0 động cơ quay thuận
Nếu stepY <0 động cơ quay nghịch
Tương tự trục YKết luận:
- Nếu StepX, StepY càng nhỏ khi khắc được hình càng mịn, chi tiết và sắc nét- Ngược lại StepX, StepY lớn hình sau khi khắc không được sắc nét và chi tiết.
</div><span class="text_page_counter">Trang 28</span><div class="page_container" data-page="28"><b>Phân tích CHẠY THỰC NGHIỆM</b>
Kết quả: chạy trên gỗ và Nhôm Anode
</div><span class="text_page_counter">Trang 29</span><div class="page_container" data-page="29"><b>5. KẾT LUẬN</b>
ra lỗi phần cứng trong quá trình vận hành.
</div><span class="text_page_counter">Trang 30</span><div class="page_container" data-page="30">• Giám sát và hiển thị lỗi của máy khắc.
• Thiết kế giao diện hành trình của máy khắc<small>.</small>
• Gia cố phần cơ khí tránh sai số khi chạy.
</div><span class="text_page_counter">Trang 31</span><div class="page_container" data-page="31">