đồ án 2 điều khiển tự động đề tài điều khiển con lắc ngược trên xe dùng phương pháp pid
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (1.56 MB, 16 trang )
<span class="text_page_counter">Trang 1</span><div class="page_container" data-page="1">
BỘ GIÁO DỤC VÀ ĐÀO TẠO
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT KHOA CHẤT LƯỢNG CAO
</div><span class="text_page_counter">Trang 2</span><div class="page_container" data-page="2"><b>CHƯƠNG 1 : TỔNG QUANGiới thiệu </b>
<b>Tính cấp thiết</b>
Bộ điều khiển PID được sử dụng rộng rãi trong các hệ thống điều khiển công nghiệp – Bộ điều khiển PID là bộ điều khiển được sử dụng nhiều nhất trong các bộ điều khiển phản hồi. Học viên khi thực hiện đề tài này có mong muốn sẽ khảo sát được ba khâu các gia trị tỉ lệ, tích phân và đạo hàm viết tắt là P, I và D tối ưu nhất có thể việc này sẽ đẫn đến việc điều khiển hiệu quả hơn cho hệ thống.
Đó là mục đích chính của đồ án 2 điều khiển tự động:”Điều khiển con lắc ngược trên xe dùng PID”.
<b>Mục tiêuGiới hạn</b>
<b>Các đề tài liên quan</b>
<b>Phương pháp và đối tượng nghiên cứuCHƯƠNG 2:CƠ SỞ LÍ THUYẾT</b>
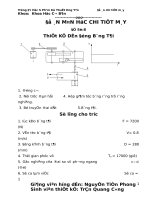
<b>MƠ HÌNH TỐN HỌC CỦA HỆ CON LẮC NGƯỢC TRÊN XE</b>
Chú thích:
F:Lực tác động vào xe M: Khối lượng xe m: Khối lượng con lắc
: Góc lệch giữa con lắc và phương thẳng đứng
</div><span class="text_page_counter">Trang 3</span><div class="page_container" data-page="3">Thông số Mô tả Đơn vị Giá trị
</div><span class="text_page_counter">Trang 4</span><div class="page_container" data-page="4">Vận tốc con lắc ngược theo phương x và phương y : (4.7) Vận tốc con lắc theo phương x và phương y: (4.8)
Từ (4.2) đến (4.10) suy ra động năng và thế năng của hệ thống xe con lắc ngược
</div><span class="text_page_counter">Trang 5</span><div class="page_container" data-page="5">Phần động cơ DC:
Hình 4.3 Khối động cơ DC
: điện trở động cơ (ohm) (nhà sản xuất cung cấp) : hệ số điện kháng (H) (nhà sản xuất cung cấp)
: hằng số phản điện (V/(rad/sec)) (nhà sản xuất cung cấp) : hằng số momen (Nm/a) (nhà sản xuất cung cấp) : momen quán tính của roto () (nhà sản xuất cung cấp) : hệ số ma sát nhớt (Nm/(rad/sec)) (phải tính tốn) : momen ma sát (Nm) (nhà sản xuất cung cấp)
</div><span class="text_page_counter">Trang 6</span><div class="page_container" data-page="6">hệ số điện kháng (H) (nhà sản xuất cung cấp) : vận tốc motor(rad/s)
momen xoắn nội (Nm) góc quay trục động cơ (rad)
Thơng số Đơn vị Giá trị
Theo định luật bảo toàn năng lượng: =
Nếu và dùng đơn vị MKS( có đơn vị V/rad/sec và có đơn vị Nm/A
</div><span class="text_page_counter">Trang 7</span><div class="page_container" data-page="7">Khối động cơ DC được miêu tả như hình sau:
Hình 4.4 Khối động cơ DC sau khi phân tích thành hàm truyền Mơ hình tốn tồn hệ thống:
Bởi vì tốc độ điện luôn luôn nhanh hơn tốc độ cơ khí:
</div><span class="text_page_counter">Trang 8</span><div class="page_container" data-page="8">Kết hợp các phương trình (4.15),(4.30),(4.34), ta được hệ phương trình động lực
<b>CHƯƠNG 3:THIẾT KẾ BỘ ĐIỀU KHIỂN Thiết kế bộ điều khiển PID</b>
<b>Thiết kế bộ điều khiển Swing-Up</b>
<b>CHƯƠNG 4:MÔ PHỎNG BỘ ĐIỀU KHIỂN BẰNG PHẦN MỀM MATLAB</b>
</div><span class="text_page_counter">Trang 9</span><div class="page_container" data-page="9"><b>CHƯƠNG 5:THI CÔNG HỆ THỐNG CON LẮC NGƯỢC THỰC TẾ</b>
1.2.1.Xây dựng mơ hình – thuật tốn điều khiển:
Con lắc ngược là một mơ hình điều khiển kinh điển,nó được sử dụng trong giảng dạy và nghiên cứu ở hầu hết các trường đại học trên khắp thế giới.Hệ con lắc ngược là mô hình phù hợp để kiểm tra các thuật tốn điều khiển hệ phi tuyến
cao ổn định trở lại.
Hình 1.1: Một số mơ hình con lắc ngược trước đây. Hệ xe con lắc ngược gồm 3 phần:
Phần cơ khí: một gồm 1 que kim loại (con lắc) quay quanh 1 trục thẳng đứng. Que kim loại được gắn gián tiếp vào một xe thơng qua một encoder để đo góc. Trên chiếc xe có 1 encoder để đo góc, xác định được vị trí chiếc xe. Do trong quá trình vận hành chiếc xe sẽ chạy tới lui với tốc độ cao để lấy mẫu nên phần cơ khí cần phải được tính tốn thiết kế chính xác, chắc chắn nhằm tránh rung gây nhiễu và hư hỏng trong quá trình vận hành.
Phần điện tử: Phần chương trình:
Mục tiêu của đề tài là khảo sát được các thông số P, I và D của hệ.
</div><span class="text_page_counter">Trang 10</span><div class="page_container" data-page="10">1.2.2.Tóm tắt nội dung các phần thực hiện trong bài: -Phần I: Tổng quát
- Đặt vấn đề về đề tài, tổng quan khái quát đề tài, và các nghiên cứu liên quan. -Phần II: Kế hoạch đồ án
-Nêu các nội dung phải thực hiện -Phần III: Giới thiệu mơ hình
-Phần IV: Phương trình tốn học và ước lượng tham số -Phần V: Thiết kế bộ điều khiển
-Phần VI: Mô phỏng và khảo sát dùng Matlab -Phần VII: Tổng kết
PHẦN II: KẾ HOẠCH ĐỒ ÁN Khối lượng cơng việc:
-Xây dụng thi cơng mơ hình hệ thống xe con lắc ngược.
-Thiết kế giải thuật học thông qua phương trình tốn học, phương trình Euler-Lagrage.
-Tiến hành mơ phỏng đánh giá đáp ứng hệ thống. -Nêu nhận xét về phương pháp điều khiển dùng PID. PHẦN III: GIỚI THIỆU MƠ HÌNH
PHẦN IV: PHƯƠNG TRÌNH TỐN HỌC VÀ ƯỚC LƯỢNG THAM SỐ 4.1.Mơ hình hóa hệ thống con lắc ngược trên xe:
Chú thích: M: Khối lượng xe m: Khối lượng con lắc l: Chiều dài thanh con lắc x: Hệ trục tọa độ con lắc
Hình 4.1 Hệ trục tọa độ của con lắc
</div><span class="text_page_counter">Trang 11</span><div class="page_container" data-page="11">Con lắc có thể quay trịn xung quanh trục xe với 1 góc 360. Vì vậy có thể chia con lắc điều khiển thành hai 2 vùng điều khiển như sau: điều khiển swing-up và cân bằng. Ban đầu con lắc nằm ở góc ta tiến hành điều khiển swing-up để đưa con
-Bộ điều khiển PID( Proportional Integral Derivative) là một cơ chế phản hồi vòng điều khiển tổng quát được sử dụng rộng rãi trong công nghiệp. Bộ điều khiển PID sẽ tính tốn giá trị “sai số” là hiệu số giữa giá trị đo thông số biến đổi và gí trị đặt mong muốn. Bộ điều khiển sẽ thực hiện giảm tối da sai số bằng cách điều chỉnh các giá trị tỷ lệ, vi phân, tích phân phù hợp.
Hình. Sơ đồ của bộ điều khiển PID
</div><span class="text_page_counter">Trang 12</span><div class="page_container" data-page="12">-Giải thuật tính tốn của bộ điều khiển PID bao gồm 3 thơng số riêng biệt đó là các gia trị tỷ lệ, tích phân, vi phân viết tắt là P, I và D. Giá trị tỉ lệ xác định tác động của sai số hiện tại, gái trị tích phân xác định tác động của tổng các sai sô quá khứ và giá trị vi phân xác định tác động của tốc độ biến đỏi sai số. Tổng chập của ba tác động này dùng để điều chỉnh q trình thơng qua một phần tử điều khiển. Nhờ vậy, những giá trị này có thể làm sáng tỏ về quan hệ thời gian: P phụ thuộc vào sai số hiện tại, I phụ thuộc vào tích lũy các sai số quá khứ và D dự đoán các sai số tương lai, dựa vào tốc độ thay đổi hiện tại.
Bộ điều khiển PID chỉ có thể điều khiển một thông số của hệ thống, để điều khiển được góc con lắc và vị trí của xe con lắc tại cùng một thời điểm thì chúng ta cần hai bộ điều khiển PID. Trong đó một thông số được xem như là thông số chính và được điều khiển trực tiếp moment của động cơ, trong khi đó thơng số cịn lại được áp vào tác động của điểm tham chiếu của thơng số chính. Hai tín hiệu đầu vào được đưa vào bộ điều khiển PID và đầu ra là tín hiệu lực tác động vào xe. Để cho con lắc ổn định cần sử dụng một bộ điều khiển hồi tiếp. Việc sử dụng bộ điều khiển hồi tiếp, dữ liệu ngõ ra sẽ có thêm nhiều thơng tin để mơ tả hệ thống.
Hình Sơ đồ của bộ điều khiển PID cho hệ con lắc ngược Biến đổi rời rạc hóa :
-Do bộ điều khiển không thể lấy mẫu liên tục theo thời gian, nó cần rời rạt một vài mức. Khi cho hệ số lấy mẫu ngắn bên trong thời gian vi phân có thể đạt được xấp xỉ một sai phân có giới hạn và tích phân qua việc lấy tổng. Chúng ta sẽ quan tâm mỗi dạng ở một thời điểm, và sai số được tính ở mỗi khoảng lấy mẫu:
Bộ PID rời rạc đọc sai số, tính toán và xuất ngõ ra điều khiển theo một khoảng thời gian xác định (không liên tục) – thời gian lấy mẫu T. Thời gian lấy mẫu cần nhỏ hơn đơn vị thời gian của hệ thống.
Bộ PID rời rạc đọc sai số, tính tốn và xuất ngõ ra điều khiển theo một khoảng thời gian xác định (không liên tục) – thời gian lấy mẫu T. Thời gian lấy mẫu cần nhỏ hơn đơn vị thời gian của hệ thống.
Khơng giống các thuật tốn điều khiển đơn giản khác, bộ điều khiển PID có khả năng xuất tín hiệu ngõ ra dựa trên giá trị trước đó của sai số cũng như tốc độ
</div><span class="text_page_counter">Trang 13</span><div class="page_container" data-page="13">thay đổi sai số. Điều này giúp cho q trình điều khiển chính xác và ổn định
Với n là bước rời rạc tại t Kết quả thu được:
Theo sách lý thuyết điều khiển tự động có có hàm truyền rời rạc trên miền ảnh z:
Ta được tín hiệu PID cho hệ rời rạc:
Với:
</div><span class="text_page_counter">Trang 14</span><div class="page_container" data-page="14">Bộ điều khiển PID (rời rạc) Mô Hình PID của xe trong Simulink:
Mơ hình PID của con lắc trong Simulink:
Ứng dụng thuật toán di truyền để xác định thông số tối ưu cho bộ điều khiển LQR
Giới thiệu giải thuật di truyền GA:
</div><span class="text_page_counter">Trang 15</span><div class="page_container" data-page="15">-Thuật toán di truyền (Genetic Algorithms – GA) là phương pháp tìm kiếm tốn cực ngẫu nhiên dựa trên cơ chế chọn lọc tự nhiên và di truyền học tự
nhiên.Chúng lặp đi lặp lại việc tìm kiếm và được sử dụng rộng rãi trong các bài tốn tối ưu hóa ở một sơ ngành khoa học và cơng nghệ. Chúng ta có thể xem tiến trình như là một qui trình vịng kín ( tạo ra thế hệ mới). Quá trình lai ghép, đột biến, chọn lọc bắt đầu lại từ điểm cơ sở và các mẫu tốt nhất sẽ được chọn. Việc lựa chọn các thể di truyền (sản phẩm của sự kết hợp giữa 2 cá thể cha mẹ) là một q trình ngẫu nhiên nhưng nó được định hướng bởi việc lựa chọn các mẫu tốt nhất trong quần thể. Thực tế, để kết thúc quá trình GA sau khi số lượng thế hệ được tạo ra và sau đó tiến hành kiểm tra chất lượng của tập hợp đó. Nếu khơng tìm thấy giải pháp tối ưu, GA có thể được khởi động lại hoặc tìm kiếm mới bắt đầu.
Tóm lại, để giải quyết bài toán bằng giải thuật di truyền, chúng ta cần thực hiện bảy bước quan trọng sau đây:
Bước 1: Chọn mơ hình cho lời giải của bài toán, chọn một số lời giải tượng trưng cho toàn bộ các lời giải (tương đương như quần thể) có thể có của bài tốn.
Bước 2: Chỉ định cho mỗi lời giải (cá thể) một ký hiệu (mã hố). Ký hiệu có thể là một dãy các số 0 và 1 hay dãy số thập phân, dãy các chữ hay hỗn hợp của số và chữ. Ký hiệu đơn giản nhất và thường dùng nhất là dãy số 0 và 1.
Bước 3: Tìm hàm số thích nghi cho bài tốn và tính hệ số thích nghi cho từng lời giải (cá thể).
Bước 4: Dựa trên hệ số thích nghi của các lời giải để thực hiện chọn lọc (Selection) và các phép toán di truyền như: lai ghép (Crossover), đột biến (Mutation).
</div><span class="text_page_counter">Trang 16</span><div class="page_container" data-page="16">Bước 5: Tính hệ số thích nghi cho các lời giải (cá thể) mới, loại bỏ đi các cá thể kém nhất để chỉ còn giữ lại một số nhất định các cá thể tương đối tốt.
Bước 6: Nếu chưa tìm được lời giải mong muốn (tối ưu) hay tương đối tốt nhất hay chưa hết thời gian ấn định, quay lại bước 4 để tìm lời giải mới.
Bước 7: Tìm được lời giải tối ưu hay thời gian ấn định đã hết thì kết thúc giải thuật và đưa ra kết quả tìm được.
Tối ưu hố bộ điều khiển PID dùng thuật toán di truyền
Tài liệu tham khảo:
Wang, C., Yin, G., Liu, C., & Fu, W. (2016). Design and simulation of inverted pendulum system based on the fractional PID controller. 2016 IEEE 11th Conference on Industrial Electronics and Applications
(ICIEA). doi:10.1109/iciea.2016.7603871 Nguyen Van Dong Hai (2009).”Luận văn thạc sĩ”.
Nguyen Thi Phuong Ha. “Lý thuyết về điều khiển tự động”.
</div>