Đồ án môn học kỹ thuật robot đề tài fanuc robot 01 (khớp 1 2 3
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (2.74 MB, 93 trang )
<span class="text_page_counter">Trang 1</span><div class="page_container" data-page="1">
<b>BỘ GIÁO DỤC VÀ ĐÀO TẠO</b>
<b>TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT TP. HỒ CHÍ MINHKHOA ĐIỆN – ĐIỆN TỬ</b>
</div><span class="text_page_counter">Trang 2</span><div class="page_container" data-page="2"><b>NHẬN XÉT CỦA GIÁO VIÊN HƯỚNG DẪN1. Nhận xét của giáo viên</b>
... Bằng chữ:...
Giáo viên hướng dẫn
<i>(Ký & ghi rõ họ tên)</i>
</div><span class="text_page_counter">Trang 3</span><div class="page_container" data-page="3"><b>LỜI NĨI ĐẦU</b>
Để hồn thành tiểu luận này, nhóm xin gư뀉i lời c#m ơn chân thành đến:
Ban giám hiệu trường Đại Học Sư phạm kỹ thuật Thành ph Ā Hồ Chí Minh v8 đã tạo điều kiện về cơ sơꄉ vật chất c>ng như hệ th Āng giáo dục, giúp cho chúng em tiếp thu t Āt những kiến thức nền t#ng và cCn thiết để vận dụng vào đồ án, đồng thời làm hành trang cho chă Eng đường sau này.
Xin c#m ơn giáo viên hướng dẫn - ThCy Đă Eng Xuân Ba đã chH dạy tận t8nh, chi tiết và động viên tinh thCn giúp chúng em có đủ kh# năng hồn thành đồ án này. Xin c#m ơn các anh trợ gi#ng đã nhiệt t8nh hỗ trợ và giúp nhóm có thể thêm những kiến thức cCn thiết trong quá tr8nh thực hiện đề tài.
Một lCn nữa, chúng em xin kính chúc qu礃Ā thCy cơ dồi dào sức khỏe và thành công.
</div><span class="text_page_counter">Trang 4</span><div class="page_container" data-page="4">Kết n Āi giao diện điều khiển, điều khiển hoạt động robot. Chạy thực nghiệm robot thực tế.
TuCn 16 Hoàn thiện thực nghiệm mô h8nh. Viết báo cáo (word và
</div><span class="text_page_counter">Trang 5</span><div class="page_container" data-page="5">(13/12 – 19/12) powerpoint).
</div><span class="text_page_counter">Trang 6</span><div class="page_container" data-page="6"><b>1.6. Phương pháp nghiên cứu...6</b>
<b>1.7. Tóm tắt nội dung đề tài...7</b>
<b>CHƯƠNG 02. CƠ SỞ LÝ THUYẾT...8</b>
</div><span class="text_page_counter">Trang 7</span><div class="page_container" data-page="7"><b>3.1. Thiết kế mơ hình 3D dùng Solidworks...30</b>
<b>4.2. Xây dựng giao diện điều khiển...48</b>
<b>4.2.1.Xây dựng giao diện kết nối Arduino...49</b>
<b>4.2.2.Xây dựng giao diện điều khiển chế độ Manual...51</b>
<b>4.2.3.Xây dựng giao diện điều khiển chế độ Auto...52</b>
<b>CHƯƠNG 05. KẾT QUẢ THỰC NGHIỆM...53</b>
</div><span class="text_page_counter">Trang 9</span><div class="page_container" data-page="9"><b>MỤC LỤC HÌNH ẢNHChương 01. Tổng quan</b>
<b>Hình 1.1. Cánh tay robot gấp s#n phẩm...2</b>
<b>Hình 1.2. Robot di động-máy bay khơng người lái UAV...2</b>
<b>Hình 1.3. Robot mơ phỏng hành vi con người...3</b>
<b>Hình 1.4. Ứng dụng robot trong lắp ráp ơ tơ...3</b>
<b>Hình 1.5. Ứng dụng robot trong gia cơng cơ khí...4</b>
<b>Hình 1.6. Ứng dụng robot trong b Āc xếp háng hóa...4</b>
<b>Hình 1.7. Robot hàn Fanuc Robot Arcmate 100i M6i RJ3...5</b>
<b>Hình 1.8. Robot Gắp Fanuc R-2000iD...5</b>
<b>Hình 1.9. Robot Fanuc Collaborative Robot CR-4iA...6</b>
<b>Chương 02. Cơ sở lý thuyếtHình 2.1. Mơ h8nh robot và đặt trục t Āi ưu...9</b>
<b>Hình 2.2. Sơ đồ kh Āi bộ điều khiển PID...17</b>
<b>Hình 2.3. Bộ điều khiển PID cho 3 khớp của robot...18</b>
<b>Hình 2.4. Kh Āi DYNAMIC VECTOR...18</b>
<b>Hình 2.5. Bộ điều khiển Fuzzy cho 3 khớp robot...20</b>
<b>Hình 2.6. Kh Āi Fuzzy logic 2 ngõ vào...21</b>
<b>Hình 2.7. Hai ngõ vào e và e_dot...22</b>
<b>Hình 2.8. Ngõ ra kh Āi Fuzzy logic...22</b>
<b>Hình 2.9. Các luật mờ trong kh Āi Fuzzy logic...23</b>
<b>Hình 2.10. Giao diện phCn mềm Matlab...24</b>
<b>Hình 2.11. Giao diện và thư viện cơng cụ Simulink...25</b>
<b>Hình 2.12. Giao diện phCn mềm Solidworks...26</b>
<b>Hình 2.13. Giao diện phCn mềm Arduino IDE...27</b>
<b>Hình 2.14. Giao diện phCn mềm Visual Studio Code...28</b>
<b>Hình 2.15. Giao diện phCn mềm QT Designer...29</b>
</div><span class="text_page_counter">Trang 10</span><div class="page_container" data-page="10"><b>Hình 2.16. Driver điều khiển động cơ bước Microstep 3.5A 40VDC...40</b>
<b>Chương 03. Thiết kế mơ hình robot</b>
<b>Hình 3.6. Thiết kế khâu hai robot...35</b>
<b>Hình 3.7. Khâu hai được tạo thêm ngôi sao để tăng tính thẩm mỹ...36</b>
<b>Hình 3.8. Khâu ba của robot...36</b>
<b>Hình 3.9. Arduino Mega 2560 R3...37</b>
<b>Hình 3.10. Động cơ bước gi#m t Āc Nema 17 tH s Ā 3969/289...38</b>
<b>Hình 3.11. Động cơ bước gi#m t Āc Nema 17 tH s Ā 57/11...39</b>
<b>Hình 3.12. Driver điều khiển động cơ bước Microstep 3.5A 40VDC...40</b>
<b>Hình 3.13. Động Cơ DC Servo GM25-370 DC Geared Motor...41</b>
<b>Hình 3.14. Mạch cCu H...42</b>
<b>Hình 3.15. Mạch cCu H dùng BJT...42</b>
<b>Hình 3.16. Mạch điều khiển động cơ DC L298N...43</b>
<b>Chương 04. Thi công mô hình robotHình 4.1. PhCn đế robot sau khi in 3d và sơn màu...46</b>
<b>Hình 4.2. Khâu 1 robot sau khi in 3D và sơn màu...47</b>
<b>Hình 4.3. Khâu 2 robot sau khi in 3D và sơn màu...47</b>
<b>Hình 4.4. Khâu 3 robot sau khi in 3D và sơn màu...48</b>
<b>Hình 4.5. Mơ h8nh robot sau khi lắp ráp hồn thiện...48</b>
<b>Hình 4.6. Màn h8nh bắt đCu giao diện điều khiển...49</b>
<b>Hình 4.7. Màn h8nh Setting Connection khi chưa kết n Āi Arduino...50</b>
</div><span class="text_page_counter">Trang 11</span><div class="page_container" data-page="11"><b>Hình 4.8. Màn h8nh Setting Connection khi đã kết n Āi với Arduino...50</b>
<b>Hình 5.3. Kiểm chứng động học robot theo phương y (khơng điều khiển)...55</b>
<b>Hình 5.4. Kiểm chứng động học robot theo phương z (khơng điều khiển)...55</b>
<b>Hình 5.15. Giao diện điều khiển Manual - vị trí 01...62</b>
<b>Hình 5.16. Robot làm việc ơꄉ vị trí 01...62</b>
<b>Hình 5.17. Giao diện điều khiển Manual - vị trí 02...63</b>
<b>Hình 5.18. Robot làm việc ơꄉ vị trí 02...63</b>
</div><span class="text_page_counter">Trang 12</span><div class="page_container" data-page="12"><b>Hình 5.23. Robot di chuyển đến vị trí P2...66Hình 5.24. Giao diện điều khiển Auto - vị trí P3...66Hình 5.25. Robot di chuyển đến vị trí P3...67</b>
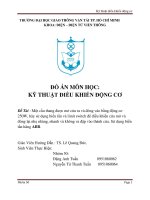
</div><span class="text_page_counter">Trang 82</span><div class="page_container" data-page="82"><i>Hình 5.23. Robot di chuyển đến vị trí P2</i>
<i>Hình 5.24. Giao diện điều khiển Auto - vị trí P3</i>
<small>69</small>
</div><span class="text_page_counter">Trang 83</span><div class="page_container" data-page="83"><i>Hình 5.25. Robot di chuyển đến vị trí P3</i>
<small>70</small>
</div><span class="text_page_counter">Trang 84</span><div class="page_container" data-page="84"><b>CHƯƠNG 06. KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN6.1.Kết luận</b>
Nh8n chung nhóm đã gi#i quyết được các yêu cCu và mục tiêu đặt ra khi thực hiện đề tài. Nhóm tính tốn và mô phỏng kiểm chứng được động học thuận và nghịch của robot. Thiết kế, tính tốn và lựa chọn các thiết bị phù hợp cho robot. Tiến hành thi cơng và lắp ráp mơ h8nh robot thực tế.
Nhóm c>ng xây dựng được giao diện điều khiển và giám sát hoạt động robot dựa trên ngôn ngữ lập tr8nh Python. Nghiên cứu và sư뀉 dụng board mạch Arduino c>ng như phCn mềm Arduino IDE để điều khiển robot làm việc. Bên cạnh đó nhóm c>ng nghiên cứu và sư뀉 dụng driver điều khiển động cơ bước điều khiển hai khớp 1,2 của robot.
Tiến hành kết n Āi và chạy mô phỏng thực tế được trên mô h8nh thật. Điều khiển, giám sát và thu thập dữ liệu tr# về trên màn h8nh giao diện điều khiển đã thiết kế. Có thể đánh giá các bộ điều khiển và hành vi robot, từ đó rút ra các hạn chế cCn c#i thiện trong quá tr8nh thực hiện đề tài.
<b>6.2.Hướng phát triển</b>
Trong tương lai, nhóm mu Ān phát triển thêm các phCn điều khiển nâng cao cho robot. Có thể lưu 礃Ā đến một s Ā hướng phát triển như ứng dụng xư뀉 l礃Ā #nh và nhận diện giọng nói. Nhóm sẽ nghiên cứu phát triển thêm ứng dụng xư뀉 l礃Ā #nh điều khiển robot nhận diện và đi chuyển đến các vị trí h8nh #nh theo mong mu Ān. Bên cạnh đó nhóm c>ng sẽ phát triển thêm phCn nhận diện giọng nói để điều khiển trực tiếp robot bằng giọng nói mà khơng cCn thơng qua các nút nhấn điều khiển.
Song song đó, nhóm c>ng nghiên cứu và c#i thiện một s Ā chi tiết robot. CCn c#i thiện kết cấu cơ khí để tăng tính thẩm mỹ và độ bền vững. Cùng với đó là điều chHnh PID cho động cơ khớp 3 để tăng độ chính xác cho robot trong lúc làm việc.
<small>71</small>
</div><span class="text_page_counter">Trang 85</span><div class="page_container" data-page="85"><b>TÀI LIỆU THAM KHẢO</b>
[1] Đinh Mạnh Hùng, Đào Tùng Linh, “Đồ án t Āt nghiệp-Thiết kế và điều khiển linh hoạt robot 7 bậc tự do”, trường Đại học Sư phạm kỹ thuật TP. HCM, năm 2021.
[2] Huỳnh Thái Hoàng, Nguy…n Thị Phương Hà, “L礃Ā thuyết điều khiển tự động”, NXB Đại học Qu Āc gia TP. HCM, năm 2005.
[3] Huỳnh Thái Hoàng, “L礃Ā thuyết điều khiển nâng cao”, NXB Đại học Qu Āc gia TP. HCM, năm 2014.
[4] John J.Craig, “Introduction to Robotics”, Pearson Education International, 2005.
<small>72</small>
</div><span class="text_page_counter">Trang 86</span><div class="page_container" data-page="86">AccelStepper stepper1(1, pulse1, dir1); AccelStepper stepper2(1, pulse2, dir2);
</div><span class="text_page_counter">Trang 87</span><div class="page_container" data-page="87">#define IN1 4 #define IN2 5 double T, xung; double vitri, vitridat; double E, E1, E2;
double alpha, beta, gamma, Kp, Kd, Ki; double Output, LastOutput;
</div><span class="text_page_counter">Trang 91</span><div class="page_container" data-page="91">for (int i=0; i<lenData;i++)
</div>