Thiết kế thiết bị nhận dạng tư thế ngồi và nhịp tim theo thời gian thực dành cho ghế thông minh
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (4.51 MB, 94 trang )
ĐẠI HỌC QUỐC GIA TP. HCM
TRƯỜNG ĐẠI HỌC BÁCH KHOA
--------------------
VÕ QUỐC BẢO
THIẾT KẾ THIẾT BỊ NHẬN DẠNG TƯ THẾ NGỒI
VÀ NHỊP TIM THEO THỜI GIAN THỰC DÀNH CHO
GHẾ THÔNG MINH
Chuyên ngành: Vật lý kỹ thuật
Mã số: 8520401
LUẬN VĂN THẠC SĨ
TP. HỒ CHÍ MINH, tháng 07 năm 2023
Cơng trình được hồn thành tại: Trường Đại học Bách khoa – ĐHQG-HCM
Cán bộ hướng dẫn khoa học: TS. Nguyễn Trung Hậu
PGS.TS. Huỳnh Quang Linh
Cán bộ chấm nhận xét 1: TS. Nguyễn Thế Thường
Cán bộ chấm nhận xét 2: TS. Mai Hữu Xuân
Luận văn thạc sĩ được bảo vệ tại Trường Đại học Bách khoa – ĐHQG-HCM ngày 09 tháng 7
năm 2023
Thành phần Hội đồng đánh giá luận văn thạc sĩ gồm:
1. Chủ tịch Hội đồng: TS. Lý Anh Tú
2. Thư ký: TS. Nguyễn Xuân Thanh Trâm
3. Phản biện 1: TS. Nguyễn Thế Thường
4. Phản biện 2: TS. Mai Hữu Xuân
5. Ủy viên: TS. Lưu Gia Thiện
Xác nhận của Chủ tịch Hội đồng đánh giá luận văn và Trưởng Khoa quản lý chuyên ngành sau
khi luận văn đã được sửa chữa (nếu có).
CHỦ TỊCH HỘI ĐỒNG
TRƯỞNG KHOA KHOA HỌC ỨNG DỤNG
TS. Lý Anh Tú
PGS. TS. Trương Tích Thiện
ĐẠI HỌC QUỐC GIA TP.HCM
TRƯỜNG ĐẠI HỌC BÁCH KHOA
Họ và tên: Võ Quốc Bảo
CỘNG HÒA XÃ HỘI CHỦ NGHĨA VIỆT NAM
Độc lập - Tự do - Hạnh phúc
NHIỆM VỤ LUẬN VĂN THẠC SĨ
MSHV: 2170961
Ngày tháng năm sinh: 14/06/1996
Nơi sinh: Bình Thuận
Chuyên ngành: Vật lý Kỹ thuật
Mã số: 8520401
I. TÊN ĐỀ TÀI:
THIẾT KẾ THIẾT BỊ NHẬN DẠNG TƯ THẾ NGỒI VÀ NHỊP TIM THEO THỜI GIAN
THỰC DÀNH CHO GHẾ THÔNG MINH
DESIGN OF A SMART DEVICE FOR POSTURE RECOGNITION AND
PHYSIOLOGICAL SIGNAL MONITORING Ò HUMAN BODY IN SMART CHAIR
APPLICATION
II. NHIỆM VỤ VÀ NỘI DUNG:
1. Nghiên cứu tổng quan về tư thế ngồi và nhịp tim.
Cơ sở sinh học.
Mối liên quan giữa tư thế ngồi với các triệu chứng đau và những ảnh hưởng đến sức khỏe.
Đo nhịp tim bằng phương pháp quang học.
2. Thiết kế thiết bị nhận dạng tư thế ngồi và đo nhịp tim theo thời gian thực.
3. Đánh giá tính chính xác, hiệu quả của thiết bị thơng qua việc so sánh kết quả nhận diện tư
thế ngồi và tư thế thực tế, so sánh kết quả nhịp tim với thiết bị khác có sẵn trên thị trường.
4. Đưa ra các kết luận quan trong từ kết quả đạt được và mở ra các hướng đi tiếp theo.
III. NGÀY GIAO NHIỆM VỤ : 06/02/2023
IV. NGÀY HOÀN THÀNH NHIỆM VỤ: 12/06/2023
V. CÁN BỘ HƯỚNG DẪN
1. TS. Nguyễn Trung Hậu – Bộ môn Vật lý Kỹ thuật Y sinh – Khoa Khoa học Ứng dụng –
Trường Đại học Bách khoa – ĐHQG.
2. PGS.TS Huỳnh Quang Linh - Bộ môn Vật lý Kỹ thuật Y sinh – Khoa Khoa học Ứng dụng –
Trường Đại học Bách khoa – ĐHQG.
Tp. HCM, ngày 12 tháng 06 năm 2023.
CÁN BỘ
CÁN BỘ
CHỦ NHIỆM BỘ MÔN
HƯỚNG DẪN 01
HƯỚNG DẪN 02
ĐÀO TẠO
TS. Nguyễn Trung Hậu
PGS. TS. Huỳnh Quang Linh
PGS. TS. Huỳnh Quang Linh
TRƯỞNG KHOA KHOA HỌC ỨNG DỤNG
PGS. TS. Trương Tích Thiện
LỜI CẢM ƠN
Để hồn thành khố cao học và thực hiện luận văn tốt nghiệp này, tôi đã nhận
được sự giúp đỡ hướng dẫn về chuyên môn cũng như sự hỗ trợ về mọi mặt của các
thầy cô, các anh chị đồng nghiệp, bạn bè và đặc biệt là từ phía gia đình. Từ đáy lịng
mình, tơi xin bày tỏ lịng kính trọng sâu sắc và lời cám ơn chân thành đối với:
TS Nguyễn Trung Hậu, PGS. TS Huỳnh Quang Linh người đã tận tình hướng
dẫn, giúp đỡ trong suốt quá trình học tập, nghiên cứu và cố vấn về các vấn đề
chun mơn cũng như hồn thiện nội dung, hình thức của luận văn này.
Phịng thí nghiệm Kỹ thuật Y sinh và thầy Lê Cao Đăng đã hỗ trợ cơ sở vật
chất trong suốt thời gian học tập, nghiên cứu và tiến hành thí nghiệm.
Nhà trường và quý thầy cô đã tạo điều kiện thuận lợi và giúp đỡ tơi trong q
trình học tập và hồn thành khố học.
Tập thể các anh chị em học viên cao học Vật lý Kỹ thuật khóa 2020, 2021,
2022 đã cùng chia sẻ những khó khăn và nhiệt tình giúp đỡ, động viên trong
thời gian qua.
Cha mẹ, anh chị em và bạn bè đã giúp đỡ và là nguồn động viên tinh thần rất
lớn đối với tôi trong suốt thời gian qua.
Một lần nữa, tôi xin gửi đến tất cả lời cảm ơn chân thành và sâu sắc nhất!
Tp. Hồ Chí Minh, ngày 25 tháng 05 năm 2023
Học viên
Võ Quốc Bảo
i
TÓM TẮT LUẬN VĂN
THIẾT KẾ THIẾT BỊ NHẬN DẠNG TƯ THẾ NGỒI
VÀ NHỊP TIM THEO THỜI GIAN THỰC DÀNH CHO
GHẾ THÔNG MINH
Mối quan hệ giữa ngồi và đau thắt lưng cũng như các bệnh về cột sống đã được nhiều
tác giả nghiên cứu và chứng minh. Nhận thức được tầm quan trọng của tư thế ngồi
đúng và những tác hại của tư thế ngồi xấu, cũng như theo dõi sự thay đổi các thông số
sinh tồn cơ bản trong thời gian ngồi. Chúng tôi đã thiết kế thiết bị ghế thông minh,
giúp nhận diện, giám sát tư thế ngồi và nhịp tim theo thời gian thực. Thiết bị sử dụng
cảm biến áp lực được bố trí phù hợp để ghi nhận sự phân bố trên bề mặt ghế khi ngồi.
Kết hợp với vi điều khiển và các mơ hình học máy giúp thiết bị có thể nhận diện tư thế
ngồi với độ chính xác 99%, hiển thị đồng thời nhịp tim tại thời điểm đó, gửi kết quả
về điện thoại thông qua Bluetooth. Thiết bị này được kỳ vọng sẽ giúp người dùng
nhận thức rõ ràng hơn về tư thế và thói quen ngồi của bản thân, sự thay đổi nhịp tim
trong q trình ngồi, từ đó tự điều chỉnh để đảm bảo sức khỏe lâu dài.
ii
ABSTRACT
DESIGN OF A SMART DEVICE FOR POSTURE RECOGNITION AND
PHYSIOLOGICAL SIGNAL MONITORING OF HUMAN BODY
IN SMART CHAIR APPLICATION
The relationship between sitting and low back pain as well as spinal diseases has been
researched and proven by many authors. Be aware of the importance of correct sitting
posture and the harmful effects of poor sitting posture, as well as monitor changes in
basic survival parameters during sitting. We have designed a smart chair device that
recognizes and monitors your sitting posture and heart rate in real time. The device uses a
suitably arranged pressure sensor to record the distribution on the surface of the seat
when sitting. Combined with microcontrollers and machine learning models, the device
can recognize the sitting posture with 99% accuracy, simultaneously display the heart rate
at that time, and send the results to the phone via Bluetooth. This device is expected to
help users become more aware of their posture and sitting habits, heart rate changes
during sitting, thereby self-adjusting to ensure long-term health.
iii
LỜI CAM ĐOAN
Tơi xin cam đoan đây là cơng trình nghiên cứu của riêng tôi dưới sự hướng dẫn của
TS. Nguyễn Trung Hậu và PGS.TS. Huỳnh Quang Linh. Các kết quả nêu trong luận
văn là trung thực, chính xác và chưa từng được cơng bố trong bất kỳ cơng trình
nghiên cứu nào khác. Những dữ liệu trong các bảng biểu và hình ảnh sử dụng
phục vụ cho việc giải thích, nhận xét, đánh giá được chính tác giả thu thập từ các
nguồn khác nhau có ghi rõ trong phần tài liệu tham khảo.
Tp. Hồ Chí Minh, ngày 25 tháng 05 năm 2023
TÁC GIẢ LUẬN VĂN
Võ Quốc Bảo
iv
MỤC LỤC
LỜI CẢM ƠN .....................................................................................................................i
TÓM TẮT LUẬN VĂN ................................................................................................... ii
ABSTRACT ..................................................................................................................... iii
LỜI CAM ĐOAN .............................................................................................................iv
MỤC LỤC ..........................................................................................................................v
DANH MỤC HÌNH ẢNH .............................................................................................. vii
DANH MỤC BẢNG BIỂU ...............................................................................................x
DANH MỤC CÁC TỪ VIẾT TẮT ..................................................................................xi
CHƯƠNG 1
GIỚI THIỆU .............................................................................................1
CHƯƠNG 2
TỔNG QUAN ...........................................................................................3
2.1
Tổng quan về tư thế ngồi ........................................................................................3
2.1.1 Tư thế ngồi đúng ...................................................................................4
2.1.2 Các tư thế ngồi sai và ảnh hưởng đến cơ thể.........................................8
2.1.3 Các tư thế ngồi cần nhận dạng. ........................................................... 11
2.2
Tổng quan về tín hiệu PPG ..................................................................................12
2.2.1 Kỹ thuật Photoplethysmography (PPG). .............................................12
2.2.2 Nguyên lý đo PPG ...............................................................................13
2.3
Thiết bị nhận dạng tư thế ngồi và nhịp tim theo thời gian thực ...........................14
2.3.1 Tổng quan thiết bị nhận dạng tư thế ngồi theo thời gian thực. ...........14
2.3.2 Phần cứng của thiết bị .........................................................................16
2.4
Thiết bị đo nhịp tim theo thời gian thực ...............................................................24
CHƯƠNG 3
3.1
PHƯƠNG PHÁP NGHIÊN CỨU ..........................................................26
Lý thuyết thống kê, dữ liệu và các phương pháp học máy ..................................26
3.1.1 Tổng quan về thống kê, dữ liệu và đại lượng đo lường độ tập trung và
phân tán của dữ liệu. ..................................................................................................26
3.1.2 Các phương pháp học máy ..................................................................30
3.2
Thiết kế thí nghiệm...............................................................................................45
v
3.3
Thiết kế mơ hình thiết bị. .....................................................................................45
3.3.1 Vị trí đặt cảm biến. ..............................................................................45
3.3.2 Thiết kế mạch in ..................................................................................47
3.4
Phương pháp thu dữ liệu ......................................................................................49
3.4.1 Viết chương trình thu và lưu dữ liệu ...................................................50
3.4.2 Thu dữ liệu của đối tượng ...................................................................51
3.5
Phương pháp phân tích dữ liệu và mơ hình học máy ...........................................55
3.5.1 Huấn luyện mơ hình ............................................................................56
3.5.2 Đánh giá mơ hình ................................................................................57
3.5.3 Nhúng mơ hình vào vi điều khiển .......................................................57
3.5.4 Thiết kế mơ hình thiết bị nhận diện nhịp tim theo thời gian thực .......57
CHƯƠNG 4
4.1
KẾT QUẢ VÀ BÀN LUẬN...................................................................61
Kết quả .................................................................................................................61
4.1.1 Trực quan hóa dữ liệu ..........................................................................61
4.1.2 Kết quả huấn luyện mơ hình................................................................62
4.1.3 Thiết bị đo nhịp tim theo thời gian thực. .............................................66
4.1.4 Thiết bị nhận dạng tư thế ngồi và nhịp tim theo thời gian thực ..........68
4.2
Bàn luận ................................................................................................................72
CHƯƠNG 5
KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN ..............................................73
TÀI LIỆU THAM KHẢO................................................................................................74
LÝ LỊCH TRÍCH NGANG..............................................................................................80
vi
DANH MỤC HÌNH ẢNH
Hình 2.1 Minh họa mặt cắt ngang của cột sống [21]. ..........................................................3
Hình 2.2 Mơ hình cơ xương toàn thân AnyBody ở tư thế đứng (A) và chế độ xem dọc mô
tả trục đứng dọc (SVA) (B), kiểu thắt lưng Roussouly (RT) (C), độ dốc xương cùng (SS)
và tỷ lệ vùng chậu (PI) ( D) [35]. .........................................................................................7
Hình 2.3 Các tư thế ngồi được khảo sát trong nghiên cứu của Casas [31]. .........................8
Hình 2.4 Kết quả hệ thống bản đồ áp suất [30]. ................................................................10
Hình 2.5 Sơ đồ minh họa của photoplethysmography. Đèn LED chiếu sáng da và ánh
sáng không hấp thụ sẽ được phát hiện bởi đi-ốt quang. (a) Đối với phương pháp phản xạ.
(b) Đối với phương pháp truyền qua [51]. .........................................................................13
Hình 2.6 Sơ đồ tổng quát của thiết bị nhận dạng tư thế ngồi theo thời gian thực. ............14
Hình 2.7 Cảm biến lực dạng phim FSR-402. ....................................................................17
Hình 2.8 Tương quan giữa lực và trở kháng của cảm biến lực FSR [54]. .........................18
Hình 2.9 Mơ hình mạch chia áp và giá trị điện trở phù hợp. .............................................19
Hình 2.10 Sơ đồ chân IC LM324.......................................................................................20
Hình 2.11 Sơ đồ chân của vi điều khiển WeMos Lolin32. ................................................21
Hình 2.12 Tiến bộ cơng nghệ ứng dụng học máy theo thời gian [55]. ..............................23
Hình 2.13 Sơ đồ của mạch đọc tín hiệu PPG [56]. ............................................................25
Hình 3.1 Đồ thị biểu diễn trực quan hình dáng phân phối của dữ liệu. .............................28
Hình 3.2 Minh họa độ lệch chuẩn của dữ liệu ...................................................................29
Hình 3.3 Minh họa mơ hình phân loại gắn nhãn hình ảnh ảnh [58]. .................................31
Hình 3.4 Ví dụ về dưới khớp và quá khớp dữ liệu [58].....................................................36
Hình 3.5 SVM phân loại biên lớn [59]. .............................................................................37
Hình 3.6 Sự nhạy cảm của biên cứng với các điểm ngoại lai [59]. ...................................38
Hình 3.7 Vai trị của siêu tham số [59]...............................................................................38
Hình 3.8 Phương pháp thêm đặc trưng để tập dữ liệu trở nên tuyến tính..........................39
Hình 3.9 Mơ hình cây quyết định phân loại hoa Diên vĩ. ..................................................41
Hình 3.10 Minh họa mơ hình Rừng ngẫu nhiên trong bài tốn phân loại hoa Diên vĩ. ....43
Hình 3.11 Tổng qt hóa hoạt động của một node [58]. ...................................................44
Hình 3.12 Lưu đồ mơ tả quy trình làm thí nghiệm. ...........................................................45
vii
Hình 3.13 Sơ đồ bố trí cảm biến. .......................................................................................46
Hình 3.14 Bố trí cảm biến trên đệm...................................................................................47
Hình 3.15 Lưu đồ biểu diễn đường đi của tín hiệu thu từ cảm biến lực. ...........................47
Hình 3.16 Sơ đồ nguyên lý mạch in. .................................................................................48
Hình 3.17 Thiết kế mạch in. ...............................................................................................49
Hình 3.18 Các bước thu và lưu dữ liệu. .............................................................................50
Hình 3.19 Quy trình thu dữ liệu. ........................................................................................52
Hình 3.20 Ngồi thẳng lưng: minh họa và dữ liệu phân bố áp lực tương ứng. ...................52
Hình 3.21 Ngồi cong lưng: minh họa và dữ liệu phân bố áp lực tương ứng. ....................53
Hình 3.22 Ngồi nghiêng trái: minh họa và dữ liệu phân bố áp lực tương ứng. .................53
Hình 3.23 Ngồi nghiêng phải: minh họa và dữ liệu phân bố áp lực tương ứng. ...............54
Hình 3.24 Ngồi chéo chân trái: minh họa và dữ liệu phân bố áp lực tương ứng...............54
Hình 3.25 Ngồi chéo chân phải: minh họa và dữ liệu phân bố áp lực tương ứng. ............55
Hình 3.26 Ngồi ngả lưng ra sau: minh họa và dữ liệu phân bố áp lực tương ứng. ...........55
Hình 3.27 Lưu đồ huấn luyện một mơ hình phân loại. ......................................................56
Hình 3.28 Thiết bị thu và xử lý tín hiệu PPG. ...................................................................57
Hình 3.29 Tín hiệu thơ sau khi chuyển dịng thành áp. .....................................................58
Hình 3.30 Tín hiệu sau khi đã loại bỏ thành phần DC và khuếch đại lần 1. .....................58
Hình 3.31 Tín hiệu PPG sau khi đi qua mạch lọc thơng dải. .............................................59
Hình 3.32 Tín hiệu trước khi đưa vào vi điều khiển. .........................................................59
Hình 4.1 Trực quan hóa dữ liệu bằng PCA 2D. .................................................................61
Hình 4.2 Trực quan hóa dữ liệu bằng PCA 3D. .................................................................61
Hình 4.3 Trực quan hóa dữ liệu bằng t-SNE 2D................................................................61
Hình 4.4 Trực quan hóa dữ liệu bằng t-SNE 3D................................................................62
Hình 4.5 Ma trận nhầm lẫn của mơ hình ANN. .................................................................63
Hình 4.6 Ma trận nhầm lẫn của mơ hình SVM. .................................................................64
Hình 4.7 Ma trận nhầm lẫn của mơ hình Cây quyết định. .................................................65
Hình 4.8 Ma trận nhầm lẫn của mơ hình Rừng ngẫu nhiên. ..............................................65
Hình 4.9 So sánh hiệu suất của mơ hình học sâu và các mơ hình học máy truyền thống. 66
Hình 4.10 Thiết bị đo nhịp tim của chúng tôi và thiết bị so sánh. .....................................67
viii
Hình 4.11 So sánh nhịp tim thu đươc từ mạch PPG và cảm biến DFRobot. .....................67
Hình 4.12 Biểu đồ Bland-Altman của tín hiệu nhịp tim. ...................................................68
Hình 4.13 Kết quả nhận diện tư thế ngồi và nhịp tim được gửi về điện thoại...................69
Hình 4.14 Hình ảnh thực tế khi đối tượng ngồi thẳng lưng và cong lưng. ........................69
Hình 4.15 Hình ảnh thực tế của đối tượng khi ngồi nghiêng trái và nghiêng phải. ..........70
Hình 4.16 Thống kê các tư thế ngồi của đối tượng trong thịi gian khảo sát. ....................70
Hình 4.17 Biểu đồ nhịp tim của đối tượng trong thời gian khảo sát. ................................71
Hình 4.18 Biểu đồ nhịp tim tương ứng với mỗi tư thế ngồi. .............................................71
ix
DANH MỤC BẢNG BIỂU
Bảng 2.1 Tổng hợp các tư thế ngồi xấu được phân loại trong luận văn và ảnh hưởng của
chúng. .................................................................................................................................12
Bảng 2.2 Tổng hợp các bài viết liên quan về “ghế thông minh” [53]. ..............................15
Bảng 2.3 Thông số của cảm biến FSR-402. ......................................................................18
Bảng 2.4 Thông số của IC LM324.....................................................................................20
Bảng 2.5 Thông số vi điều khiển Wemos Lolin32.............................................................21
Bảng 3.1 Ma trận nhầm lẫn nhận diện số 5 trong tập tin MNIST [59]. .............................34
Bảng 3.2 Tóm tắt một số kernel thông dụng......................................................................40
Bảng 3.3 Các tư thế ngồi cần nhận diện. ...........................................................................51
x
DANH MỤC CÁC TỪ VIẾT TẮT
STT
TỪ VIẾT TẮT
TỪ ĐẦY ĐỦ
1
LBP
Low back pain
2
WDI
Weight Distribution Index
3
PPG
Photoplethysmography
4
HRV
Heart Rate Variability
5
OLED
Organic Light Emitting Diode
6
n/a
Not Availabel
7
FSR
Force Sensing Resistor
8
IC
Integrated Circuit
9
Op-Amp
Operational Amplifier
10
Lipo
Lithium-Ion Polymer
11
IoT
Internet of Things
12
GPIO
General-purpose Pins
13
I2C
Inter-Integrated Circuit
14
SCL
Serial Clock Line
15
SDA
Serrial Data Line
16
ML
Machine Learning
17
SVC
Support Vector Machine
18
ID3
Iterative Dichotomiser 3
19
ANN
Artificial Neural Network
20
CSV
Comma-separated values
21
PCA
Principal Compoment Analysis
22
t-SNE
t – Distributed Stochastic Neighbor Embedding
xi
CHƯƠNG 1
GIỚI THIỆU
Mối liên hệ giữa tư thế ngồi và cơn đau ngày càng trở thành một chủ đề
được quan tâm khi lối sống ít vận động ở con người hiện đại ngày càng tăng. Sự phát
triển của các công cụ tiện ích, các thiết bị điện tử phục vụ cho mục đính giải trí như điện
thoại di động, tivi, máy tính,… cũng làm giảm các hoạt động thể chất ở con người, và khi
sử dụng các thiết bị này cũng kéo dài thời gian ngồi hằng ngày của con người. Trong
nhiều năm, tư thế ngồi đã được xác định là một trong những yếu tố rủi ro chính phát triển
bệnh đau thắt lưng (LBP) [1, 2]. Tỷ lệ phổ biến của bệnh đau thắt lưng đã và đang ảnh
hưởng đến nền kinh tế của các nước cơng nghiệp hóa theo nhiều cách [3, 4]. Tỷ lệ phổ
biến của LBP được báo cáo trong những nghề đòi hỏi người lao động phải ngồi trong
phần lớn thời gian trong ngày làm việc cao hơn đáng kể so với tỷ lệ phổ biến của dân số
nói chung [5, 6]. Cần lưu ý rằng tư thế không đúng, đặc biệt là khi ngồi và ngồi lâu, được
coi là yếu tố quan trọng nhất dẫn đến sự xuất hiện và duy trì LBP, cũng như căng cơ ở cổ
[7, 8]. Bên cạnh đó, việc giữ những tư thế ngồi không đúng kết hợp với cuộc sống ít vận
động trong thời gian dài có thể làm tăng nguy cơ chấn thương do gập cơ [9], và có thể
gây ra các rối loạn cơ xương như đau lưng với chức năng phổi suy giảm [10], đau thắt
lưng hoặc chấn thương [11], đau cơ và mô liên kết của gân [12], tăng tải trọng cột sống
[13], thay đổi vị trí cột sống cổ [14]. Bên cạnh đó còn loét do tỳ đè ở một số bệnh nhân
[15]. Bản thân việc ngồi với tư thế duy trì lưng thẳng với ít sự thay đổi tư thế hoặc vị trí
khơng cho thấy mối liên hệ gia tăng với sự hiện diện của bệnh đau thắt lưng [16]. Từ đây
có thể thấy việc mất cân bằng trong tư thế ngồi cũng như việc duy trì tư thế xấu sẽ gây
nhiều ảnh hưởng đến sức khỏe của các cá nhân và gây ra các bệnh khác nhau.
Các nhà nghiên cứu đã suy đoán rằng mọi người chỉ thỉnh thoảng xem xét tư thế
của chính họ [17]. Bằng chứng học thuật cho thấy rằng tư thế ngồi theo thói quen thường
nghiêng về tư thế cong lưng hơn so với các tư thế thẳng đứng khác [18, 19]. Mặc dù các
phương pháp thay đổi tư thế ngồi bao gồm ghế có thể điều chỉnh và thay đổi tư thế chủ
động của người ngồi, nhưng không phải tất cả các ghế đều được trang bị thiết bị điều
chỉnh. Các nghiên cứu cũng đã chứng minh rằng ngay cả khi có cơ chế điều chỉnh thì nó
cũng hiếm khi được sử dụng và người dùng có xu hướng điều chỉnh ghế ngay lần đầu sử
1
dụng [20]. Điều này có thể là do người ngồi cảm thấy không cần phải điều chỉnh lại ghế
một khi họ thấy rằng nó đã thoải mái. Có thể thấy tư thế mà người ngồi cho là thoải mái
nhất là do cảm nhận chủ quan của chính họ, chưa có công cụ giúp người ngồi nhận ra tư
thế ngồi hiện tại và điều chỉnh cho phù hợp.
Mục tiêu đề tài: tìm ra giải pháp cải thiện sự mất cân bằng trong tư thế ngồi, giúp
người dùng nhận ra và hạn chế các tư thế ngồi xấu, cũng như nhắc nhở người dùng vận
động sau một khoảng thời gian ngồi liên tục. Đồng thời theo dõi sự thay đổi các thông số
sinh tồn của cơ thể trong thời gian ngồi. Từ đó tránh những ảnh hưởng xấu phát sinh từ
việc ngồi đến sức khỏe mỗi cá nhân. Chúng tôi đã thực hiện đề tài: Thiết kế thiết bị nhận
dạng tư thế ngồi và nhịp tim theo thời gian thực dành cho ghế thông minh.
Nhiệm vụ: để thực hiện mục tiêu trên, đề tài đưa ra những nhiệm vụ sau:
Nghiên cứu về tư thế ngồi: tổng quan, thực trạng, đưa ra tư thế ngồi đúng
và tư thế ngồi xấu, cùng với những hưởng đến sức khỏe.
Tìm hiểu và nghiên cứu cơ sở và nguyên lý của thiết bị.
Thiết kế chế tạo thiết bị nhận dạng tư thế ngồi và nhịp tim theo thời gian
thực.
Tìm hiểu về các phương pháp học máy, học sâu được sử dụng để phân loại
tư thế ngồi, các tiêu chí lựa chọn phương pháp phù hợp với đề tài.
Huấn luyện mơ hình phân loại bằng các dữ liệu thu được từ cảm biến.
Đánh giá kết quả, hiệu suất của mơ hình từ đó lựa chọn mơ hình phù hợp.
Nhúng mơ hình phân loại vào vi điều khiển, thực hiện dự đoán kết quả
nhận dạng tư thế ngồi và nhịp tim trên chính vi điều khiển và gửi kết quả về điện
thoại thông qua Bluetooth.
2
CHƯƠNG 2
2.1
TỔNG QUAN
Tổng quan về tư thế ngồi
Lưng là một cấu trúc phức tạp gồm xương, cơ và các mô khác tạo thành lưng hoặc
phần sau của thân người, từ cổ đến xương chậu. Ở trung tâm là cột sống, không chỉ nâng
đỡ trọng lượng của phần trên cơ thể mà còn chứa đựng và bảo vệ tủy sống – cấu trúc hệ
thống thần kinh mỏng manh mang tín hiệu điều khiển chuyển động của cơ thể và truyền
đạt cảm giác. Xếp chồng lên nhau là khoảng 30 xương - đốt sống - tạo thành cột sống,
còn được gọi là xương sống. Mỗi xương này chứa một lỗ hình trịn, khi xếp chồng lên
nhau thẳng hàng với tất cả các xương khác, sẽ tạo ra một kênh bao quanh tủy sống. Tủy
sống đi xuống từ đáy não và kéo dài (ở người lớn) đến ngay bên dưới khung xương sườn.
Hình 2.1 Minh họa mặt cắt ngang của cột sống [21].
Đốt sống là xương tạo thành cột sống. Các dây thần kinh nhỏ (“rễ”) đi vào và đi ra
từ tủy sống qua các khoảng trống giữa các đốt sống này. Bởi vì xương cột sống tiếp tục
phát triển lâu dài sau khi tủy sống phát triển hết chiều dài trong thời thơ ấu, nên các rễ
3
thần kinh ở lưng dưới và chân kéo dài nhiều inch xuống cột sống trước khi thốt ra ngồi.
Bó rễ thần kinh lớn này được gọi là Cauda Equina (đuôi ngựa). Khoảng cách giữa các đốt
sống được duy trì bởi các miếng sụn tròn, xốp gọi là đĩa đệm. Chúng tạo sự linh hoạt ở
lưng dưới và hoạt động như bộ giảm xóc xuyên suốt cột sống để đệm xương khi cơ thể di
chuyển. Các dây chằng và gân giữ cố định các đốt sống và gắn các cơ vào cột sống.
Bắt đầu từ đỉnh, cột sống có bốn vùng đốt sống:
Bảy đốt sống cổ hoặc cổ (được dán nhãn C1-C7).
Mười hai đốt sống ngực hoặc lưng trên (được dán nhãn T1-T12).
Năm đốt sống thắt lưng (được dán nhãn L1-L5), được gọi là lưng dưới.
Xương cùng và xương cụt, một nhóm xương hợp nhất với nhau ở đáy cột
sống.
Trong phạm vi của luận văn này việc phân định tư thế ngồi chủ yếu dựa vào hình
dạng của lưng đối tượng khi ngồi. Các tác động của tư thế ngồi đến các thành phần của
lưng cũng sẽ được xem xét. Từ đó đưa ra nhận định về tư thế ngồi đúng và tư thế ngồi
xấu, xác định dữ liệu đầu ra của bài toán phân loại.
2.1.1 Tư thế ngồi đúng
Tư thế cơ thể không chỉ được coi là sự sắp xếp không gian của các bộ phận cơ thể
riêng lẻ và dáng người, mà cịn là cách duy trì tư thế đứng thẳng. Thuật ngữ tâm khối là
điểm mà khối lượng của cơ thể được phân bố đều nhau, cũng là điểm cân bằng của cơ thể
[22]. Mặc dù trọng tâm tổng thể của cơ thể khi đứng được đặt khá cao (nằm ngay dưới
đốt sống cùng S2, khoảng 55% chiều cao của cơ thể), nhưng tư thế thẳng đứng vẫn được
duy trì tự động, ngay cả trong các tình huống thay đổi liên quan đến các hoạt động hàng
ngày khác nhau.
Tư thế thẳng đứng của cơ thể là một đặc điểm khơng chỉ riêng của lồi người mà
cịn giữa các cá thể với nhau. Do đó, tư thế của những người khác nhau là tương tự nhau,
nhưng không đồng nhất. Hơn nữa, tư thế của một cá nhân không cố định. Tư thế cơ thể
đúng có thể được định nghĩa là tư thế thuận tiện cho hoạt động vận động bình thường,
đồng thời khơng làm rối loạn hoạt động của các cơ quan nội tạng. Bất chấp sự khác biệt
4
giữa các cá nhân, tư thế của nhiều người đáp ứng các tiêu chí trên và khơng gây ra bất kỳ
bệnh tật nào.
Sự sắp xếp không gian của các đoạn cơ thể phụ thuộc chủ yếu vào cấu trúc bình
thường của bộ phận hỗ trợ hệ thống xương khớp và sự điều chỉnh hiệu quả của tư thế cơ
thể. Trong điều kiện bình thường, hai yếu tố này đảm bảo sự đối xứng trong mặt phẳng
phía trước giữa lực nén và lực kéo tác động lên cả hai bên của trục cơ thể, điều này rất
quan trọng đối với việc điều chỉnh tư thế cơ thể. Trong mặt phẳng đứng dọc (sagittal
plane – mặt phẳng cắt theo đường giữa của cơ thể, chia cơ thể thành bên trái và bên phải),
điều quan trọng là mối quan hệ giữa các hình chiếu của trọng tâm của các phần cơ thể
phía trên và các khớp bên dưới các phần cơ thể. Chúng thường rất gần với các trục quay
của các khớp, do đó các mơ-men xoắn liên quan đến trọng lực là tương đối nhỏ. Kết quả
là, việc duy trì tư thế thẳng đứng của cơ thể khơng địi hỏi các cơ phản trọng lực phải
căng quá mức [23].
Một tư thế ngồi tốt phải có đường cong cột sống thắt lưng cong tương tự như tư
thế đứng [24, 25], các chuyên gia về công thái học ủng hộ tư thế ngồi thẳng [26, 27]. Tư
thế ngồi thẳng lưng được mô tả là đầu và thân thẳng đứng, hai chân dưới cong một góc
khoảng 90° ở hơng và đầu gối, đồng thời bàn chân đặt chắc chắn trên sàn [28]. Tư thế
này cũng được áp dụng trong các nghiên cứu của Castanharo và cộng sự trong việc định
lượng tải trọng tác động lên cột sống thắt lưng của các đối tượng khi được yêu cầu điều
chỉnh từ tư thế ngồi cong lưng sang tư thế ngồi thẳng lưng [29]. Tương tự với nghiên cứu
chứng minh tầm quan trọng của tư thế ngồi bằng cách đo áp lực ngồi của Lee và các cộng
sự [30]. Ngồi ra tiêu chí cho tư thế ngồi thẳng lưng trên còn được áp dụng trong các
khảo sát và đánh giá [31, 32, 33].
Để làm rõ hơn về vấn đề tại sao tư thế ngồi thẳng lưng lại tốt hơn các tư thế ngồi
khác có thể dựa vào phương pháp phân tích các thành phần ngoại lực và nội lực. Ngoại
lực là những lực tác động của môi trường bên ngoài hay của những vật thể khác tác động
lên vật thể đang xét, gồm tải trọng tác động và phản lực liên kết. Vật thể chịu tác động
của tải trọng sẽ truyền tác động sang các chi tiết tiếp xúc với chúng. Ngược lại các chi tiết
sẽ tác động lên vật thể đang xét những phản lực. Vật thể chịu liên kết làm cho chuyển
động bị ngăn cản. Khi đó sẽ xuất hiện các phản lực, chúng có phương ứng với phương
5
của chuyển động bị ngăn cản. Trong khi đó nội lực là các lực tương tác giữa các phần tử
vật chất của vật thể xuất hiện khi vật rắn bị biến dạng dưới tác động của ngoại lực [34].
Các thành phần của nội lực bao gồm: nén, kéo, uốn, xoắn, cắt. Cụ thể hơn khi xem xét
cột sống trong tư thế ngồi, thành phần ngoại lực tác động là tải trọng của cơ thể. Tải trọng
từ phần đầu sẽ truyền xuống cột sống cổ, qua cột sống ngực đến cột sống thắt lưng… và
tiếp tục truyền xuống ghế. Tải trọng trên mỗi đốt sống sẽ tăng dần theo chiều từ trên
xuống dưới. Hai đốt sống thắt lưng L4 và L5 vốn có nhiệm vụ hỗ trợ phần trên cơ thể để
trong việc thực hiện các động tác xoay, gập hoặc vặn người. Ngồi ra, chính hai đốt này
cũng duy trì đường cong tự nhiên của cột sống để tạo tư thế đứng thẳng cho cơ thể. Do
nằm ở vị trí thấp nhất của thắt lưng nên L4, L5 phải chịu nhiều áp lực từ phần thân trên
của cơ thể và đây chính là lý do khiến cho nó dễ bị thối hóa, bị tổn thương. Khi so sánh
tải trọng trên các đốt sống lưng trong trường hợp ngồi thẳng lưng và các tư thế ngồi cong
lưng, dễ dàng nhận thấy khi đốt sống bị lệch so với tư thế thẳng thì áp lực mà đĩa đệm và
đốt sống đó phải chịu sẽ lớn hơn so với ngồi thẳng lưng. Việc thay đổi áp lực và sự phân
bố của nó có thể khiến cho đĩa đệm giữa các đốt sống phình ra và chèn vào không gian
chứa tủy sống hoặc rễ thần kinh và gây đau. Hai đốt sống này còn liên kết với nhiều bộ
phận trong cơ thể nên nếu khi xảy ra tình trạng thối hóa sẽ dễ gây nên các bệnh lý khác
ở cột sống. Bên cạnh đó việc khi ở tư thế cong lưng sẽ kích hoạt các cơ vùng lưng nhiều
hơn, cơ thể cần tiêu hao nhiều năng lượng hơn để tăng cường hoạt động của các nhóm cơ
lưng, và nếu giữ tư thế đó kéo dài sẽ gây căng và mỏi cơ.
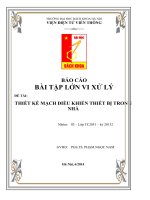
Bằng cách sử dụng mơ hình cơ xương tồn thân AnyBody [35], Bassani và các
cộng sự đã chứng minh tư thế thẳng lưng tạo ra ít lực nén lên vùng thắt lưng hơn các tư
thế cong lưng về phía trước hoặc phía sau.
6
Hình 2.2 Mơ hình cơ xương tồn thân AnyBody ở tư thế đứng (A) và chế độ xem
dọc mô tả trục đứng dọc (SVA) (B), kiểu thắt lưng Roussouly (RT) (C), độ dốc xương
cùng (SS) và tỷ lệ vùng chậu (PI) ( D) [35].
Sự gia tăng lực nén ở đoạn cuối đốt sống lưng L4L5 và vị trí của đốt sống lưng và
xương cùng L5S1 ở tư thế cong lưng về phía trước được ghi nhận, lực cắt trước tại L4L5
cũng lớn hơn trong tư thế này. Tư thế cong lưng về phía trước thường dẫn đến tăng lực cơ
nhiều đầu - cơ nằm giữa của các cơ thân sau, làm vững thân chính khi thân di chuyển từ
gập sang duỗi. Các cơ dựng sống (cơ chạy song song với cột sống và nối với các mỏm
gai, mỏm ngang và xương sườn) và cơ thẳng bụng chủ yếu được kích hoạt ở tư thế cong
lưng về phía trước và phía sau. Thật vậy, việc huy động cơ dựng sống là cần thiết để
chống lại sự dịch chuyển của trọng lượng cơ thể trong các tư thế cong lưng về phía trước
và cả trong tư thế thẳng lưng, mặc dù với lực thấp hơn. Ngược lại, cơ thẳng bụng (nằm
phía trước ở vùng thắt lưng) được kích hoạt để chống lại các tư thế cong lưng về phía
sau. Đặc biệt, khi ở tư thế thẳng lưng hoặc cong lưng về phía trước cơ thẳng bụng khơng
được kích hoạt. Tóm lại nghiên cứu chứng minh rằng, tư thế cong lưng về phía trước là
tư thế có khả năng tăng tải trọng nhất lên cột sống thắt lưng [35]. Tải trọng dọc trục có
7
liên quan đến nguy cơ phồng và thoát vị đĩa đệm [36] và nguy cơ gãy đốt sống ở bệnh
nhân lỗng xương và giảm mật độ khống của xương [37].
2.1.2 Các tư thế ngồi sai và ảnh hưởng đến cơ thể
Mặc dù tư thế ngồi thẳng thích hợp liên quan đến việc nghiêng xương chậu ra
trước, thắt lưng cong và thư giãn lồng ngực, giúp giảm áp lực lên các đĩa đệm, nhưng hầu
hết mọi người có xu hướng ngồi ở tư thế cong lưng trong thời gian dài, điều này thường
đi kèm với tư thế biến dạng cột sống và xương chậu. Khi tư thế được duy trì với cổ hoặc
lưng cong về phía trước, các cơ dọc sống lưng được kích hoạt quá mức và tải trọng liên
tục lên các cơ này có thể làm tăng nguy cơ đau cổ và lưng [38, 39]. Trong các nghiên cứu
trước đây so sánh tư thế ngồi của bệnh nhân LBP và những người khỏe mạnh, tư thế của
bệnh nhân bị đau thắt lưng cho thấy góc uốn của thắt lưng tăng lên [40] và giảm độ bền
của cơ thân [41]so với tư thế ngồi thẳng lưng.
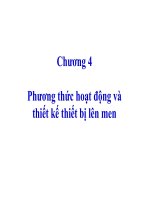
Trong nghiên nghiên cứu của Casas và các cộng sự [31], tác giả đã tiến hành khảo
sát các tư thế ngồi và sự ảnh hưởng đến các triệu chứng đau lưng và cổ như sau:
Hình 2.3 Các tư thế ngồi được khảo sát trong nghiên cứu của Casas [31].
Với các tư thế ngồi thông thường của sinh viên đại học như: (A) Lưng cong lên
với bàn chân đặt trên sàn; (B) Lưng cong về phía trước và bàn chân được đặt trên sàn;
8
(C) Ngồi thẳng lưng, với bàn chân đặt trên sàn; (D) Ngồi ngả lưng ra sau với bàn chân
được đặt trên sàn. (E) Lưng cong và bàn chân được đặt trên một chiếc ghế khác; (F) Cong
lưng kết hợp với bắt chéo chân; (G) Lưng thẳng kết hợp với bắt chéo chân; (H) Ngả lưng
ra sau và bàn chân được gác trên một chiếc ghế khác. Trong nghiên cứu này tư thế (C)
tham chiếu để phân tích, vì tư thế này giúp duy trì các đường cong sinh lý, ổn định hệ cơ
và phân bổ trọng tâm đối xứng, có thể coi là tư thế tối ưu. Các tư thế ngồi cịn lại được
coi là tư thế rủi ro có thể gây đau lưng. Trải nghiệm đau được đo lường bằng bảng câu
hỏi mô tả trải nghiệm đau ở các vùng giải phẫu (cổ, lưng và lưng dưới), thời gian nhớ lại
(12 tháng, 4 tuần và ngày khảo sát), thời gian tiến triển (Cấp tính < 4 tuần, phụ cấp tính 4
- 12 tuần và mãn tính > 12 tuần), cường độ (thang điểm tương tự trực quan), hạn chế hoặc
khơng có khả năng thực hiện các hoạt động học tập và phương pháp điều trị đau đã thực
hiện. Theo đó, kết quả về trải nghiệm đau cho thấy tần suất tăng khi thời gian nhớ lại
tăng, tỷ lệ đau cổ cao hơn (79,8%). Trải nghiệm đau cho thấy cường độ tương tự đối với
ba vùng giải phẫu; đau mãn tính nhiều hơn ở vùng lưng dưới (45%). Hạn chế hoạt động
học tập do đau chiếm tỷ lệ từ 22,7 đến 29,8%. Tự dùng thuốc là cách kiểm soát cơn đau
phổ biến nhất.
Các yếu tố liên quan đến đau cổ và lưng vào ngày khảo sát bao gồm: thời gian
ngồi trước máy tính ≥ 21 giờ/tuần, tư thế ngồi cong lưng kết hợp với bắt chéo chân (F).
Tư thế ngồi này cũng được ghi nhận có mối liên hệ tích cực với đau cổ cũng như đau
lưng cấp tính và mãn tính. Mối liên quan tích cực của tư thế ngồi cong lưng kết hợp với
bắt chéo chân (F) với các triệu chứng đau có thể được giải thích là do khi ngồi ở tư thế
này hoạt động của cơ cổ và cơ dựng sống tăng lên, cũng như làm tăng áp lực lên cột sống
cổ. Ngoài ra tư thế này cũng làm giảm tình trạng ưỡn sống cổ, tăng căng các rễ thần kinh
và áp lực đĩa đệm, góp phần gây đau cổ [42]. Snijders và các cộng sự báo cáo rằng nhiều
người áp dụng tư thế bắt chéo chân khi ngồi trong thời gian dài tại nơi làm việc và trong
nhiều môi trường [43]. Tư thế ngồi bắt chéo chân đã được báo cáo là làm tăng độ nghiêng
của xương chậu so với tư thế ngồi thẳng [44].
Tư thế (D) Ngồi ngả lưng ra sau với bàn chân được đặt trên sàn cũng được tìm
thấy mối tương quan với đau lưng mãn tính. Ngồi ở tư thế D có thể gây ra các cơn đau
ngắt quãng liên quan đến tư thế ngồi kéo dài và ít vận động [42, 45].
9
Lee và các cộng sự [30] đã nghiên cứu chứng minh tầm quan trọng của tư thế ngồi
đúng bằng cách đo áp lực ngồi. Một hệ thống lập bản đồ áp suất được sử dụng để đo áp
suất khi ngồi ở các tư thế ngồi thẳng lưng (tư thế đúng), ngồi nghiêng bên trái. Trong thí
nghiệm này chỗ ngồi của ghế được chia thành 4 phần với các hướng (A: trước, P: sau, L:
trái, R: phải), áp lực ngồi được đo ở tư thế viết. Các đối tượng đã viết một cái gì đó trong
khi các phép đo được thực hiện. Các thành phần áp suất trung bình trong mỗi vùng của
ghế tương ứng với 𝑋 , 𝑋 , 𝑋 , 𝑋 . Để so sánh ngồi nghiêng một bên với tư thế ngồi
thẳng, chỉ số phân bổ trọng lượng (Weight Distribution Index - WDI) được vận dụng để
phân tích áp lực trung bình trong mỗi tư thế.
Hình 2.4 Kết quả hệ thống bản đồ áp suất [30].
Sự cân bằng và tính đối xứng trong hệ thống bản đồ áp suất ghi nhận được là biểu
hiện cho một tư thế ngồi tốt, áp lực của phần thân trên khi ngồi được truyền xuống xương
chậu kết hợp với trọng lượng sẵn có nên ghi nhận được giá trị áp lực cao hơn những vùng
khác. Cột sống và xương chậu được nối với nhau bằng phức hợp cột sống-chậu. Vì vậy,
vị trí của xương chậu trong tư thế ngồi có ảnh hưởng rất lớn đến cột sống [46] . Ví dụ,
vẹo cột sống gây ra bởi sự nghiêng về phía trước của xương chậu, làm tăng góc trước của
cột sống thắt lưng và góc sau của đốt sống ngực do hoạt động bù trừ của cơ thể để duy trì
sự ổn định của thân [47]. Ngược lại, xương chậu bị nghiêng về phía sau dẫn đến gù lưng -
10
tức là tư thế cúi xuống. Chỉ số phân bố trọng lượng thấp hơn ở các tư thế ngồi nghiêng so
với ở tư thế ngồi đúng cho thấy rằng ở tư thế không đúng, áp lực được chuyển đến khu
vực phía trước, có thể gây nghiêng xương chậu ra sau. Giá trị thấp hơn của chỉ số phân
bố trọng lượng trái/ phải ở tư thế ngồi nghiêng một bên so với tư thế ngồi đúng cho thấy
áp lực ngồi bên trái tăng lên, có thể gây nghiêng khung chậu trái. Kết quả đo phân bố
trọng lượng đối với áp lực ngồi trước, sau, trái và phải cho thấy tư thế ngồi nghiêng một
bên có thể gây nghiêng xương chậu ra sau cũng như nghiêng xương chậu trái. Vì vậy, nó
dễ gây mất cân bằng khung xương chậu hơn so với các tư thế còn lại. Nghiêng khung
chậu sau và nghiêng khung chậu bên có thể gây ra chứng gù lưng và vẹo cột sống tương
ứng. Góc nghiêng tăng cũng có thể kích hoạt các cơ đối diện với hướng nghiêng [48] ,
do đó tư thế ngồi nghiêng có thể gây ra các triệu chứng bệnh lý như bất đối xứng vùng
chậu. Sự bất đối xứng vùng chậu và chứng vẹo cột sống vơ căn có thể dẫn đến tình trạng
bất đối xứng về tư thế, phân bổ trọng lượng không đều và mất cân bằng cơ bắp
[49] , hoặc thậm chí gây ra sự mất cân bằng thể chất nghiêm trọng hơn. Do đó, điều quan
trọng là duy trì tư thế ngồi đúng để đảm bảo cột sống và xương chậu khỏe mạnh.
2.1.3 Các tư thế ngồi cần nhận dạng.
Như đã trình bày ở trên: Tư thế ngồi thẳng lưng là tư thế ngồi đúng với thắt lưng
thẳng đứng, cột sống ở trạng thái đứng, các góc của khớp hơng, khớp gối và khớp mắt cá
chân là 90° và bàn chân chạm sàn. Đây là một trong những tư thế mà chúng tơi thực hiện
trong bài tốn phân loại tư thế ngồi ở các chương sau, và cũng là tư thế được khuyến
khích ngồi nhiều nhất. Các tư thế xấu phổ biến khác và tác hại điển hình của nó được
tổng hợp trong bảng dưới đây:
11