trang bị điện xe cầu
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (908.4 KB, 83 trang )
TRƯỜNG ĐHSPKT VINH ĐỒ ÁN MÔN TRANG BỊ
ĐIỆN
MỤC LỤC
MỤC LỤC 1
7
Với là hệ số ma sát trượt 7
Với la bán kính cổ trục bánh xe lấy bằng 0,08 (m) 7
Đối với các cơ cấu có bánh xe sắt lăn trên đường ray phải tính đến lực cản ma sát giữa
mép bánh xe và đường ray.Lực đó được tính thêm bắng hệ số dự trữ k.hệ số dự trữ k
được xác định theo kinh nghiệm vận hành lấy K=2 và toàn bộ lực cản trong trường hợp
này là : 7
= = 135000 0,05 = 6750(N) 8
Đối với các cơ cấu có bánh xe sắt lăn trên đường ray phải tính đến lực cản ma sát giữa
mép bánh xe và đường ray.Lực đó được tính thêm bắng hệ số dự trữ k.hệ số dự trữ k
được xác định theo kinh nghiệm vận hành lấy K=2 và toàn bộ lực cản trong trường hợp
này là : 8
GVHD : Vũ Anh Tuấn 1 SVTH : Lê Viết Nghĩa
TRƯỜNG ĐHSPKT VINH ĐỒ ÁN MÔN TRANG BỊ
ĐIỆN
PHẦN I: TỔNG QUAN VỀ CẦU TRỤC VÀ CẦU TRỤC PHÂN XƯỞNG
I. Lý thuyết chung máy nâng hạ, vận chuyển:
1. Khái niệm chung:
Sự phát triển kinh tế của mỗi nước phụ thuộc rất nhiều vào mức độ cơ giới hoá và
tự động hoá các quá trình sản xuất. Trong quá trình sản xuất máy nâng hạ vận chuyển
đóng vai trò khá quan trọng. Máy nâng, vận chuyển là cầu nối giữa các hạng mục công
trình sản xuất riêng biệt, giữa các phân xưởng trong một nhà máy, giữa các máy công tác
trong một dây chuyền sản xuất. Máy nâng vận chuyển được dùng rất phổ biến trong công
nghiệp, xây dựng, giao thông Trong nhóm máy vận chuyển thì cầu trục là một thiết bị
vận chuyển điển hình.
Trong cầu trục có 3 chuyển động:
- Chuyển động của xe cầu theo phương ngang (xe cầu đi dọc theo phân xưởng).
- Chuyển động của xe con theo phương ngang (xe con di chuyển trên xe cầu theo
chiều ngang phân xưởng)
- Cơ cấu nâng hạ được bố trí trên xe con và nó được chuyển động theo phương
thẳng đứng (thực hiện nâng hạ tải trọng).
2. Phân loại máy nâng - vận chuyển:
Phụ thuộc vào đặc điểm hàng hoá cần vận chuyển, kích thước, số lượng và phương
vận chuyển mà các máy nâng, vận chuyển rất đa dạng. Việc phân loại một cách hoàn hảo
các máy nâng, vận chuyển rất khó khăn.
Có thể phân loại các máy nâng, vận chuyển theo các đặc điểm sau:
- Theo phương vận chuyển hàng hoá:
+ Theo phương thẳng đứng: thang máy, máy nâng
+ Theo phương nằm ngang: băng chuyền, băng tải
+ Theo mặt phẳng nghiêng: xe kíp, thang chuyền, băng tải
+ Theo các phương kết hợp: cầu trục, cần trục, cầu trục cảng, máy xúc
- Theo cấu tạo của cơ cấu di chuyển:
+ Máy nâng, vận chuyển đặt cố định: thang máy, máy nâng, thang chuyền, băng
tải, băng chuyền
+ Di chuyển tịnh tiến: cầu trục cảng, cần cẩu con dê, các loại cần trục, cầu trục
+ Di chuyển quay với một góc quay giới hạn: cần cẩu tháp, máy xúc
GVHD : Vũ Anh Tuấn 2 SVTH : Lê Viết Nghĩa
TRƯỜNG ĐHSPKT VINH ĐỒ ÁN MÔN TRANG BỊ
ĐIỆN
- Theo cơ cấu bốc hàng:
+ Cơ cấu bốc hàng là thùng, cabin, gầu treo
+ Dùng móc, xích treo, băng
+ Cơ cấu bốc hàng bằng nam châm điện
- Theo chế độ làm việc:
+ Chế độ dài hạn: băng tải, băng chuyền, thang chuyền
+ Chế độ ngắn hạn lặp lại: máy xúc, thang máy, cần trục
3. Đặc điểm đặc trưng cho chế độ làm việc của hệ truyền động điện máy nâng,
vận chuyển.
Máy nâng, vận chuyển thường được lắp đặt trong nhà xưởng hoặc để ngoài trời.
Môi trường làm việc của các máy nâng, vận chuyển rất nặng nề, đặc biệt là ngoài hải
cảng, các nhà máy hoá chất, các xí nghiệp luyện kim
Các khí cụ, thiết bị điện trong hệ thống truyền động và trang bi điện của các máy
nâng, vân chuyển phải làm việc tin cậy trong mọi điều kiện nghiệt ngã của môi trường,
nhằm nâng cao năng suất, an toàn trong vận hành và khai thác.
* Đối với hệ truyền động điện cho băng truyền và băng tải phải đảm bảo khởi
động động cơ truyền động khi đầy tải; đặc biệt là vào mùa đông khi nhiệt độ môi trường
giảm làm tăng mômen ma sát trong các ổ đỡ dẫn đến làm tăng đáng kể mômen cản tĩnh
M
c
.
Trên hình 1.3 biểu diễn mối quan hệ phụ thuộc giữa mômen cản tĩnh và tốc độ
động cơ: M
c
= f(
ω
)
Trên đồ thị ta thấy:
Khi
ω
= 0, M
c
lớn hơn (2
÷
2,5)M
c
ứng
với tốc độ định mức thay đổi
đối với cơ cấu nâng - hạ, mômen theo
* Động cơ truyền động cầu trục nhất là
tải trọng rất rõ rệt.
Khi không có tải trọng
(không tải) mô men của động
cơ không vượt quá (15
÷
25)%M
đm
Đối với cơ cấu nâng của cần trục gầu
ngoạm đạt tới 50%M
đm
Hình 1.1: quan hệ M
c
=f
ω
GVHD : Vũ Anh Tuấn 3 SVTH : Lê Viết Nghĩa
M
c
ω
0
đm
TRƯỜNG ĐHSPKT VINH ĐỒ ÁN MÔN TRANG BỊ
ĐIỆN
Đối với động cơ di chuyển xe khi động cơ không tải cầu bằng (50
÷
55)%M
đm
Trong các hệ truyền động các cơ cấu của máy nâng, vận chuyển yêu cầu quá trình
tăng tốc và giảm tốc xảy ra phải êm, đặc biệt là đối với thang máy và thang chuyên chở
khách. Bởi vậy mômen động trong quá trình quá độ phải được hạn chế theo yêu cầu của
kĩ thuật an toàn.
Năng suất của máy nâng, vận chuyển quyết định bởi hai yếu tố: tải trọng của thiết bị
và số chu kỳ bốc, xúc trong một giờ. Số lượng hàng hoá bốc xúc trong mỗi một chu kỳ
không giống nhau và nhỏ hơn trọng tải định mức, động cho nên phụ tải đối với cơ chỉ đạt
(60
÷
70)% công suất định mức động cơ.
Do điều kiện làm việc của máy nâng, vận chuyển nặng nề, thường xuyên làm việc
trong chế độ quá tải (đặc biệt là máy xúc) nên các máy nâng, vận chuyển được chế tạo có
độ bền cơ khí cao, khả năng chịu quá tải lớn
Xe cầu có thể chạy trên các đường ray đặt trên cao dọc theo nhà xưởng, còn xe con có
thể chạy dọc theo dầm cầu.
Vì vậy mà cầu trục có thể nâng hạ và vận chuyển hàng theo yêu cầu tại bất kỳ điểm
nào trong không gian của nhà xưởng.
II. Đặc điểm của hệ truyền động cầu trục và cầu trục phân xưởng:
* Mômen cản trên trục động cơ là: Tổng hợp của hai mômen thành phần
- Mômen do ma sát gây ra luôn chống lại chuyển động quay của đông cơ.
- Mômen do tải trọng sinh ra sẽ chống lại hoặc hỗ trợ chuyển động quay của động
cơ tuỳ thuộc vào lúc tải trọng đi lên hay đi xuống.
* Tính chất của phụ tải là làm việc ở chế độ ngắn hạn lặp lại.
* Chu kỳ làm việc của cơ cấu:
- Di chuyển không tải
- Di chuyển khi mang tải.
(Giữa các giai đoạn có thời gian nghỉ).
1. Sơ đồ động học của cơ cấu nâng hạ:
GVHD : Vũ Anh Tuấn 4 SVTH : Lê Viết Nghĩa
TRƯỜNG ĐHSPKT VINH ĐỒ ÁN MÔN TRANG BỊ
ĐIỆN
2. Hệ số tiếp điện tương đối TĐ%:
Khi tính toán hệ số tiếp điện tương đối chúng ta bỏ qua thời gian hãm và thời gian
mở máy.
Thời gian toàn bộ một chu kỳ làm việc của cơ cấu nâng hạ có thể được tính theo
năng suất Q và tải trọng định mức G
đm
:
Q
G
T
dm
ck
.3600
=
[ ]
s
Trong đó: Q : năng suất bốc giỡ hàng hoá
[ ]
hN /
G
dm
: tải trọng nâng hạ định mức
[ ]
N
Thời gian làm việc khi nâng, hạ được xác định từ chiều cao vận tốc nâng hạ.
Hệ số tiếp điện tương đối:
TĐ% =
%100.
T
lv
ck
T
T
lv
: Thời gian làm việc của 1 chu kỳ xác định theo điều kiện làm việc cụ thể
của cơ cấu.
3. Chọn sơ bộ công suất động cơ:
* Xây dựng đồ thị phụ tải:
* Tính mômen trung bình hoặc mômen đẳng trị:
- Mômen trung bình được xác định theo công thức:
M
tb
=
ck
ii
T
tM
k
∑
.
- Mômen đẳng trị được xác định theo công thức:
GVHD : Vũ Anh Tuấn 5 SVTH : Lê Viết Nghĩa
TRƯỜNG ĐHSPKT VINH ĐỒ ÁN MÔN TRANG BỊ
ĐIỆN
M
đt
=
ck
n
i
ii
T
tM
∑
=1
2
Trong đó:
M
i
: Trị số mômen ứng với khoảng thời gian t
i
k = 1,2
÷
1,3
→
Hệ số dự trữ phụ thuộc vào mức độ nhấp nhô của
đồ thị phụ tải, tần số mở máy, hãm máy.
Điều kiện chọn công suất động cơ:
M
dm
≥
M
tb ,
M
dm
≥
M
đt
Kiểm nghiệm:
* Xây dựng biểu đồ phụ tải chính xác sau khi đã tính đến thời gian khởi động và hãm
của động cơ.
* Tính lại hệ số tiếp điện tương đối thực có tính đến thời gian khởi động và hãm.
TĐ%
th
=
%100
ck
hkdlv
T
ttt
∑ ∑ ∑
++
Trong đó:
∑
lv
t
: Tổng thời gian làm việc,
∑
kd
t
: Tổng thời gian khởi động
∑
h
t
: Tổng thời gian hãm
Và tính phụ tải chính xác theo đại lượng đẳng trị M
đtcx
* Tính mômen đẳng trị chính xác của đồ thị phụ tải:
tc
tt
TD%
%
.
TD
MM
dttc
=
Trong đó: M
tc
: Mômen quy đổi về hệ số tiếp điện tiêu chuẩn
TĐ% : Hệ số tiếp điện tiêu chuẩn: 15%, 25%, 40%, 60%
Động cơ được chọn là đúng nếu thoả mãn yêu cầu:
M
tc
≤
M
đmĐC
M
tc
= M
đtcx
%
%
th
tc
TD
TD
GVHD : Vũ Anh Tuấn 6 SVTH : Lê Viết Nghĩa
TRƯỜNG ĐHSPKT VINH ĐỒ ÁN MÔN TRANG BỊ
ĐIỆN
PHẦN II: THIẾT KẾ HỆ TRUYỀN ĐỘNG CHO XE CẦU CỦA
CẦU TRỤC
CHƯƠNG 1 : TÍNH CHỌN CÔNG SUẤT TRUYỀN ĐỘNG ỨNG DỤNG
CHO TRUYỀN ĐỘNG XE CẦU CỦA CẦU TRỤC
1. Xác định phụ tải tĩnh
* Phụ tải tĩnh khi xe di chuyển có tải:
Thành phần
1
F
được xác định theo biểu thức :
0
1
( )
(100000 25000 10000 300000) 0,12
1305( )
40
b
G G f
F N
R
+ ×
+ + + ×
= = =
Trong đó
0
G
là trọng lượng bản thân cơ cấu
G
là trọng lượng tải trọng
b
R
là bán kính bánh xe lấy bằng 40 (cm)
f
là hệ số ma sát lăn
f
= 0,12
Thành phần lực
ct
F
được xác định theo biểu thức
0
( )
ct
F G G
µ
= + ×
Với
µ
là hệ số ma sát trượt
Nếu dời điểm đặt của lực này về vành bánh xe thì tính theo biểu thức
0
8
' ( ) (100000 25000 10000 300000) 0,05 4350( )
40
ct
ct
b
R
F G G N
R
µ
= + × × = + + + × × =
Với
ct
R
la bán kính cổ trục bánh xe lấy bằng 0,08 (m)
Toàn bộ lực đặt lên bánh xe là
0
1
( )
c ct ct
b
G G
F F F R f
R
µ
+
= + = × × +
(100000 25000 10000 300000)
(0,05 8 0,12)
40
+ + +
= × × +
5655( )N=
Đối với các cơ cấu có bánh xe sắt lăn trên đường ray phải tính đến lực
cản ma sát giữa mép bánh xe và đường ray.Lực đó được tính thêm bắng
hệ số dự trữ k.hệ số dự trữ k được xác định theo kinh nghiệm vận hành
lấy K=2 và toàn bộ lực cản trong trường hợp này là :
GVHD : Vũ Anh Tuấn 7 SVTH : Lê Viết Nghĩa
TRƯỜNG ĐHSPKT VINH ĐỒ ÁN MÔN TRANG BỊ
ĐIỆN
0
' ( ) 2 5655 11310( )
c c ct
b
G G
F K F K R f N
R
µ
+
= × = × × × + = × =
Công suất và mômen trên trục động cơ lúc xe mang tải là:
1
'
11310 2
30,16(k )
60 1000 1000 0,75
c
C
F V
P W
η
×
×
= = =
× ×
'
11310 0,4
201,06( )
30 0,75
c b
Ct
F R
M Nm
i
η
×
×
= = =
× ×
* Phụ tải tĩnh khi di chuyển không tải:
Thành phần
1
F
được xác định theo biểu thức
0
1
(100000 25000 10000) 0,12
405( )
40
b
G f
F N
R
×
+ + ×
= = =
Thành phần lực
ct
F
được xác định theo biểu thức
ct
F
=
0
G
×
µ
= 135000
×
0,05 = 6750(N)
Toàn bộ lực đặt lên bánh xe lúc không tải là:
0
0 1
135000
( ) (0,05 8 0,12) 1755( )
40
c ct ct
b
G
F F F R f N
R
µ
= + = × × + = × × + =
Đối với các cơ cấu có bánh xe sắt lăn trên đường ray phải tính đến lực
cản ma sát giữa mép bánh xe và đường ray.Lực đó được tính thêm bắng
hệ số dự trữ k.hệ số dự trữ k được xác định theo kinh nghiệm vận hành
lấy K=2 và toàn bộ lực cản trong trường hợp này là :
0
' ( ) 2 1755 3510( )
c c ct
b
G
F K F K R f N
R
µ
= × = × × × + = × =
Công suất và mômen trên trục động cơ lúc xe không tải là:
0
0
0
'
3510 4
18,72(k )
60 1000 1000 0,75
c
C
F V
P W
η
×
×
= = =
× ×
Với
0
η
= 0,5. Tra hình 1.7 trang 11 _ Trang bị điện – điện tử
0
0
0
'
62,4( )
c b
C
F R
M Nm
i
η
×
= =
×
2. Xác định hệ số tiếp điện tương đối TĐ%:
TĐ% =
%100.
ck
lv
T
T
GVHD : Vũ Anh Tuấn 8 SVTH : Lê Viết Nghĩa
TRƯỜNG ĐHSPKT VINH ĐỒ ÁN MÔN TRANG BỊ
ĐIỆN
Với: T
lv
= T
0
+ T
1
T
ck
= T
lv
+ T
nghỉ
Trong đó:
• T
0
: Thời gian xe di chuyển không tải:
T
0
=
[ ]
0
40
10
4
S
s
v
= =
• T
1
: Thời gian xe di chuyển mang tải:
T
1
=
[ ]
40
20
2
S
s
v
= =
* Thời gian làm việc là:
T
lv
= 10 + 20 =30
[ ]
s
* Thời gian chu kỳ: T
ck
= 60 + 30 = 90 s
* Hệ số làm việc tương đối:
TĐ% =
=%100.
ck
lv
T
T
30
.100% 33,33%
90
=
3. Tính chọn sơ bộ công suất động cơ:
Chọn sơ bộ công suất động cơ theo phụ tải đẳng trị kết hợp với hệ số tiếp điện tương đối:
Theo công thức (3.32) trang 128 – Trang bị điện, ta có:
2
2 2
.
719,2 .20 446,4 .10
26,89(k )
20 10
n
j j
j
đt
n
j
j
P t
P w
t
+
= = =
+
∑
∑
Điều kiện chọn công suất động cơ: P
đt
≤
P
đm
⇒
P
đmđc
≥ 26,89(Kw)
Tra bảng 1-3 trang 111 “ Đề cương bài giảng trang bị điện ” ta chọn động cơ kích từ
song song loại cầu trục luyện kim, điện áp 220V, vỏ kín, làm mát tự nhiên, chế độ làm
việc ngắn hạn lập lại, TĐ% = 50%, chế độ định mức dài hạn, TĐ% = 100%, với các số
liệu sau:
Kiểu
π
- 52 TĐ
tc
% = 25%
P
đm
= 32 kW r
ư
+ r
cp
= 0,0545
Ω
U
đm
= 220 V r
cks
= 58
Ω
n
đm
= 760 vg/p I
đm
= 164 A
φ
đm
= 2,45 mVb
GVHD : Vũ Anh Tuấn 9 SVTH : Lê Viết Nghĩa
TRƯỜNG ĐHSPKT VINH ĐỒ ÁN MÔN TRANG BỊ
ĐIỆN
4. Kiểm nghiệm công suất động cơ:
* Kiểm nghiệm theo điều kiện phát nóng:
Mô men cản tĩnh khi xe chuyển động với tải được tính ở trên là :
402,13( . )
ct
M N m=
Mô men cản tĩnh khi xe di chuyển không tải là :
0
187,2( . )
c
M N m=
Mô men quán tính trên trục động cơ khi xe cầu đầy tải:
J
t
∑
= J
D
+ J
LH
+
2
i
J
T
+ (m
x
+ m
t
) (
ϖ
x
v
)
2
=
2 2
2
0,155 0,1 30 (13500 30000)( ) 27,75
79,55
kgm+ + + + =
Mô men quán tính trên trục động cơ khi xe di chuyển không tải:
2
0
2
0
)(
ω
v
m
i
J
JJJ
x
T
LHĐ
+++=
∑
=
2 2
2
1,6 4
0,155 0,1 13500( ) 34,4
30 79,55
kgm+ + + =
Nếu mô men trung bình của động cơ M
tb
trong thời gian mở máy là không đổi và
bằng 2M
dm
thì thời gian chạy xe cầu có tải t
xt
và không tải t
0x
từ lúc bắt đầu chạy đến
lúc đạt tốc độ ổn định là:
t
xt
=
ctđm
đmt
cttb
đmt
MM
J
MM
J
−
=
−
∑∑
2
ϖϖ
=
27,75 79,55
10,97
402,26 201,06
s
×
=
−
t
0x
=
0
0
0
0
2
cđm
đm
ctb
đm
MM
J
MM
J
−
=
−
∑∑
ϖϖ
34,4 79,55
8,05
402,26 62,4
s
×
=
−
Quãng đường tăng tốc của xe cầu khi đầy tải và khi không tải:
L
tmm.
=
10,97
2 10,97
2 2
xt
t
t
v m= × =
L
0.mm
=
0
0
8,05
4 16,1
2 2
x
t
v m= × =
GVHD : Vũ Anh Tuấn 10 SVTH : Lê Viết Nghĩa
TRƯỜNG ĐHSPKT VINH ĐỒ ÁN MÔN TRANG BỊ
ĐIỆN
Nếu việc hãm xe cầu bằng phanh điện cơ ở cổ trục động cơ với mô men hãm M
h
=2M
đm
thì thời gian hãm từ v
đm
(hay
đm
ϖ
) đến v = 0 khi xe cầu đầy tải và không tải là:
t
ht
=
27,75 79,55
3,7
402,26 201,06
tđm
h ct
J
s
M M
ω
∑
×
= =
+ +
t
0h
=
0
0
34,4 79,55
5,9
402,26 62,4
đm
h c
J
s
M M
ω
∑
×
= =
+ +
Quãng đường hãm của xe cầu khi đầy tải và khi không tải:
L
ht
=
1 1
2 3,7 3,7
2 2
t ht
v t m= × =
L
0h
=
0 0
1 1
4 5,9 11,8
2 2
h
v t m= × =
Quãng đường xe cầu chạy ổn định khi đầy tải và khi không tải:
L
tod.
= l - L
tmm.
- L
ht
=40 – 10,97 – 3,7 = 25,33m
L
0.od
= l - L
0.mm
- L
0h
= 40 – 16,1 – 11,8 = 12,1m
GVHD : Vũ Anh Tuấn 11 SVTH : Lê Viết Nghĩa
TRƯỜNG ĐHSPKT VINH ĐỒ ÁN MÔN TRANG BỊ
ĐIỆN
GVHD : Vũ Anh Tuấn 12 SVTH : Lê Viết Nghĩa
M(N.
m)
t(s)
0
(rad/s)
0
t(s)
odt
t
2:
0
t
0od
t
2:
0
t
dm
ϖ
dm
ϖ
−
tb
M
ct
M
0c
M
a)
b)
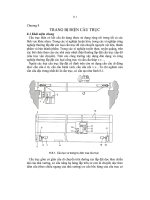
Hình 1.1:a)Đồ thị phụ tải xe cầu;b) Đồ thị tốc độ
TRƯỜNG ĐHSPKT VINH ĐỒ ÁN MÔN TRANG BỊ
ĐIỆN
Thời gian xe cầu chạy ổn định tương ứng lúc đầy tải và không tải :
t
tod.
=
.
25,43
12,6
2
od t
đm
L
s
v
= =
t
0.od
=
.
0
12,1
3
4
od o
L
s
v
= =
Thời gian của một chu kỳ làm việc của xe cầu :
T
ck
= 90s
Thời gian nghỉ trong một chu kỳ :
T
nghi
= T
ck
- t
tod.
- t
0.od
- t
tmm.
- t
0.mm
- t
ht
- t
0h
= 90– 12,6 – 3 – 10,97 –8,05 – 3,6 – 5,8 = 45,56s
Thời gian đóng điện tương đối của động cơ :
(%) =
100% 49,2%
ck nghi
lv
ck ck
T t
t
T T
−
= =
Đồ thị phụ tải dựng theo các số liệu được tính như hình trên. Từ đó, tính được mô
men đẳng trị trong thời gian làm việc với thời gian đóng điện tương đối
(%) 49,2%
ε
=
.
Khi tính phải chú ý đến việc tỏa nhiệt kém của động cơ trong thời gian quá độ nhờ hệ số
tỏa nhiệt kém
5,0=
β
:
M
đt
=
0 0
0.
2
0.
2
0.
2
.
2
)(
odtodmmtmm
odctodctmmtbtmmttb
tttt
tMtMtMtM
+++
+++
β
=
2 2 2 2
402,26 10,97 402,26 8,05 201,06 12,72 62,4 3,1
270 .
0,5(10,97 8,05) 12,72 3,1
N m
× + × + × + ×
=
+ + +
Chuyển đổi mô men đẳng trị về
(%)
ε
= 25%
M
dtTC
= M
dt
TC
LV
%
%
ε
ε
=
17,56
270 378 .
25
N m=
Vì M
dtTC
= 378 < 402,26 N.m = M
đm
nên động cơ đã chọn để truyền động xe cầu có
độ dự trữ nhiệt lớn.
Động cơ đã chọn hoàn toàn thõa mãn điều kiện về chế độ nhiệt.
* Kiểm nghiệm theo điều kiện quá tải mô men :
Điều kiện kiểm nghiệm :
GVHD : Vũ Anh Tuấn 13 SVTH : Lê Viết Nghĩa
TRƯỜNG ĐHSPKT VINH ĐỒ ÁN MÔN TRANG BỊ
ĐIỆN
λ
lvm
dm
M
M ≥
Với
λ
= (2
4÷
) là hệ số quá tải động cơ
Mô men cực đại của động cơ :
M
maxlv
= I
qd
×
k
dm
φ
; M
dm
= I
dm
×
k
dm
φ
Mà : I
qd
= 2I
dm
⇒
M
maxlv
= 2M
dm
Thật vậy, ta có :
2
2 3,14 760
79,55( / )
60 60
dm
dm
n
rad s
π
ϖ
×
× ×
= = =
⇒
32000
402,28 .
79,55
dm
dm
dm
P
M N m
ω
= = =
Mặt khác : M
maxlv
= I
dmdmdmlv
kIk
φφ
×=× 2
max
=
2 162 1,2 2,5 980 .N m× × × =
Vậy : M
maxlv
< 2M
dm
, nên động cơ đã chọn thõa mãn điều kiện quá tải mô men.
GVHD : Vũ Anh Tuấn 14 SVTH : Lê Viết Nghĩa
TRƯỜNG ĐHSPKT VINH ĐỒ ÁN MÔN TRANG BỊ
ĐIỆN
CHƯƠNG 2: LỰA CHỌN PHƯƠNG ÁN TRUYỀN ĐỘNG CHO XE CẦU CỦA
CẦU TRỤC
I. Khái niệm chung:
1. Khái niệm:
Ngày nay với sự phát triển của khoa học kỹ thuật thì các máy sản xuất ngày một đa
dạng, đa năng hơn dẫn đến hệ thống trang bị điện ngày càng phức tạp, đòi hỏi độ chính
xác cao và tin cậy.
Một hệ thống truyền động điện không những phải đảm bảo được yêu cầu công
nghệ mà phải đảm bảo có một chế độ đặt trước ổn định về thời gian quá độ, dải điều
chỉnh, ổn định tốc độ Tuỳ theo các loại máy công tác mà có những yêu cầu khác nhau
cần thiết cho việc ổn định tốc độ, mômen với độ chính xác cao nào đó trước sự biến đổi
của tải và các thông số nguồn Do đó bộ biến đổi năng lượng điện xoay chiều thành một
chiều đã và đang được sử dụng rộng rãi.
Bộ biến đổi này có thể sử dụng nhiều thiết bị khác nhau chế tạo ra như hệ thống
máy phát, khuếch đại từ, hệ thống van chúng được điều khiển theo những nguyên tắc
khác nhau với những ưu nhược điểm khác nhau.
Khi có một yêu cầu kỹ thuật sẽ có nhiều phương án lựa chọn, giải quyết, song mỗi
phương án lại có một số ưu nhược điểm khác nhau về ứng dụng của chúng trong từng
hoàn cảnh cụ thể cho phù hợp yêu cầu. Để đáp ứng các yếu tố có sử dụng hài hòa giữa
các chỉ tiêu kinh tế - kỹ thuật.
Với những hệ thống truyền động đơn giản, không có yêu cầu cao về chất lượng và
truyền động thì ta nên dùng động cơ xoay chiều đơn giản. Với những hệ thống có yêu cầu
cao về chất lượng và truyền động, về thay đổi tốc độ, độ chính xác thì ta thường chọn
động cơ một chiều có dải điều chỉnh phù hợp.
Đối với truyền động của động cơ điện một chiều thì bộ biến đổi rất quan trọng. Nó
quyết định đến chất lượng của hệ thống do vậy việc lựa chọn phương án và lựa chọn bộ
biến đổi thông qua việc xét các hệ thống.
2. Ý nghĩa của việc lựa chọn phương pháp:
GVHD : Vũ Anh Tuấn 15 SVTH : Lê Viết Nghĩa
TRƯỜNG ĐHSPKT VINH ĐỒ ÁN MÔN TRANG BỊ
ĐIỆN
Việc lựa chọn phương án hợp lý có một ý nghĩa quan trọng, nó được thể hiện qua
các mặt:
+ Đảm bảo được yêu cầu công nghệ máy móc sản xuất.
+ Đảm bảo được sự làm việc lâu dài, tin cậy.
+ Giảm giá thành sản phẩm, tăng năng suất.
+ Dễ dàng sữa chữa, thay thế khi xảy ra sự cố.
II. Các phương án truyền động:
1. Hệ truyền động máy phát động cơ (F - Đ)
Trong hệ truyền động máy phát - Động cơ (F - Đ) nguồn cung cấp phần ứng động cơ
là bộ biến đổi máy điện (máy phát điều khiển kích từ độc lập).
Sơ đồ nguyên lý :
Động cơ Đ truyền động cho máy sản xuất, máy sản xuất được cấp điện phần ứng từ máy
phát F. Động cơ sơ cấp kéo máy phát F và động cơ một chiều KĐBĐK, động cơ
ĐK cũng kéo máy phát tự kích từ K để cấp điện kích từ cho động cơ Đ và máy phát F.
Biến trở RKK dùng để điều chỉnh dòng điện kích từ của máy phát tự kích từ F. Nghĩa
là để điều chỉnh điện áp phát ra cấp cho các cuộn kích từ máy phát KTF và cuộn dây
động cơ KT Đ. Biến trở RKF dùng để điều chỉnh dòng kích từ máy phát F, do đó điện
áp phát ra của máy phát F đặt vào phần ứng động cơ Đ. Biến trở RK Đ dùng để điều
chỉnh dòng kích từ động cơ, do đó thay đổi tốc độ động cơ nhờ thay đổi từ thông.
Phương trình đặc tính cơ của động cơ của động cơ Đ
GVHD : Vũ Anh Tuấn 16 SVTH : Lê Viết Nghĩa
TRƯỜNG ĐHSPKT VINH ĐỒ ÁN MÔN TRANG BỊ
ĐIỆN
d
uu
d
k
RI
k
U
Φ
−
Φ
=
.
ω
Với U =U
F
– R .I
hay
u
d
uEuD
d
I
k
RR
k
FE
.
.
Φ
−
−
Φ
=
ω
Từ phương trình đặc tính cơ của hệ F -
Đ ta có họ đặc tính cơ của hệ là những
đường thẳng song song nằm ở cả bốn
góc phần tư của mặt phẳng tọa độ với
đặc tính cứng
* Đánh giá chất lượng của hệ thống
- Ưu điểm:
+ Phạm vi điều chỉnh dễ dàng và lớn
+ Có khả năng điều chỉnh rất bằng phẳng
+ Tổn hao khi mở máy, đảo chiều quay và khi điều chỉnh tốc độ bé, vì quá trình này đ-
ược thực hiện trên mặt kích từ.
+ Có thể đảo chiều động cơ một cách dể dàng.
+ Có khả năng quá tải cao.
+ Đặc tính quá độ tốt, thời gian quá độ ngắn
+ Điện áp đầu ra của máy phát bằng phẳng có lợi cho động cơ
+ Có khả năng giữ cho đặc tính cơ của động cơ cao và không đổi trong quá trình làm
việc.
- Nhược điểm:
+ Hệ thống sử dụng nhiều máy điện quay cho nên gây ồn, kết cấu cơ khí cồng kềnh
chiếm nhiều diện tích
+ Tổng công suất đặt lớn.
+ Vốn đầu tư ban đầu lớn.
+ Máy điện một chiều thường có từ dư lớn, đặc tính từ hóa có trể nên khó điều chỉnh sâu
tốc độ.
2.Hệ thống van - động cơ ( T- Đ ):
GVHD : Vũ Anh Tuấn 17 SVTH : Lê Viết Nghĩa
TRƯỜNG ĐHSPKT VINH ĐỒ ÁN MÔN TRANG BỊ
ĐIỆN
Hình 2.2.9: Sơ đồ khối
Sơ đồ gồm:
+ FT : Máy phát tốc dùng để phản hồi âm tốc độ phần ứng của động cơ.
+ BBĐ : Bộ biến đổi dùng thyristor biến đổi điện áp xoay chiều thành một chiều cấp
cho động cơ.
+ Đ : Động cơ điện một chiều kích từ độc lập kéo máy sản xuất.
+ TH - KĐ : Khâu tổng hợp và khuếch đại tín hiệu.
+ U
cd
: Tín hiệu đặt vào.
+
γ
.n : Tín hiệu phản hồi âm tốc độ.
* Đặc tính cơ của hệ thống truyền động T - Đ:
- Chế độ dòng điện liên tục:
Dòng điện chỉnh lưu I
d
chính là dòng phần ứng.
Dựa vào sơ đồ thay thế (hình 2.2.9) viết được sơ đồ đặc tính.
I
K
XR
K
E
n
dm
K
dm
do
φφ
α
cos.
+
−=
M
K
XR
K
E
n
dm
K
dm
do
2
).(
.
cos.
φ
φ
α
+
−=
Đặc tính cơ có độ cứng
K
dm
XR
K
+
=
2
)(
φ
β
X
k
: Đặc trưng cho sụt áp do chuyển mạch giữa các van.
Thay đổi góc điều khiển:
+ Khi
πα
÷= 0
sđđ chỉnh lưu biến thiên từ E
do
đến - E
do
và ta được một họ đặc
tính song song nhau nằm ở nửa bên phải mặt phẳng toạ độ
[ ]
M,
ω
do các van không cho
dòng điện phần ứng đổi chiều.
GVHD : Vũ Anh Tuấn 18 SVTH : Lê Viết Nghĩa
X
K
R
E
d
E
Hình 2.2.10: Sơ đồ thay thế
TRƯỜNG ĐHSPKT VINH ĐỒ ÁN MÔN TRANG BỊ
ĐIỆN
Các đặc tính cơ của hệ T - Đ mềm hơn các đặc tính cơ của hệ F - Đ bởi thành phần
sụt áp
k
U∆
do hiện tượng chuyển mạch giữa các van bán dẫn gây nên.
Hình 2.2.11: Họ đặc tính cơ của hệ T - Đ
+ Khi
2
0
π
α
≤≤
: Bộ biến đổi làm việc ở chế độ chỉnh lưu, động cơ có thể làm việc
ở chế độ động cơ nếu sđđ E > 0 và ở chế độ hãm ngược nếu sđđ E đổi chiều.
+ Khi
max
2
αα
π
≤≤
: Bộ biến đổi làm việc ở chế độ nghịch lưu phụ thuộc, biến cơ
năng của tải thành điện năng xoay chiều cùng tần số lưới và trả về lưới điện. Động cơ
làm việc ở chế độ hãm tái sinh khi tải có tính thế năng.
Dòng điện trung bình của mạch phần ứng:
K
d
XR
EE
I
+
−
=
Phương trình đặc tính:
I
K
XR
K
E
dm
K
dm
do
.
cos.
φφ
β
ω
+
+=
- Chế độ dòng điện gián đoạn:
Trong thực tế tính toán hệ T - Đ chỉ cần xác định biên giới vùng dòng điện gián
đoạn, là đường phân cách giữa vùng dòng điện liên tục và dòng điện gián đoạn. Trạng
thái biên liên tục là trạng thái mà góc dẫn
λ
=
π
2
/p và góc chuyển mạch
0=
µ
.
Đường biên liên tục gần là đường elip.
GVHD : Vũ Anh Tuấn 19 SVTH : Lê Viết Nghĩa
TRƯỜNG ĐHSPKT VINH ĐỒ ÁN MÔN TRANG BỊ
ĐIỆN
Để giảm độ lớn của trục nhỏ elip, tăng số pha của chỉnh lưu. Tuy nhiên khi tăng số
pha chỉnh lưu sơ đồ sẽ phức tạp.
* Đánh giá chất lượng của hệ thống:
- Ưu điểm:
+ Tốc độ nhanh, không gây tiếng ồn và dễ tự động hoá do các van bán dẫn có hệ
số khuếch đại công suất cao.
+ Công suất tổn hâo nhỏ, kích thước và trọng lượng nhỏ
+ Giá thành rẻ, dễ bảo dưỡng sửa chữa.
- Nhược điểm:
+ Mạch điều khiển phức tạp, điện áp chỉnh lưu có biểu đồ đập mạch cao, gây đến
tổn thất phụ đáng kể trong động cơ và hệ thống.
+ Chuyển mạch làm việc khó khăn do đường đặc tính nằm trong mặt phẳng toạ độ.
+ Trong thành phần của hệ biến đổi có MBA nên hệ số cos
ϕ
thấp.
+ Do vai trò chỉ dẫn dòng một chiều nên việc chuyển đổi chế độ làm việc khó khăn
với các hệ thống đảo chiều.
+ Do có vùng làm việc gián đoạn của đặc tính nên không phù hợp truyền động có tải
nhỏ.
III. Lựa chọn phương án truyền động
Qua quá trình phân tích hai hệ thống F - Đ và T - Đ ta thấy chúng có những ưu, nhược
điểm nhất định. Cả hai hệ thống đều đáp ứng được yêu cầu công nghệ đặt ra.
Nhưng xét về chỉ tiêu kinh tế, kỹ thuật thì mỗi hệ thống đạt được những đặc điểm
khác nhau. Cụ thể ta thấy hệ F - Đ dễ điều chỉnh tốc độ, chuyển đổi trạng thái hoạt động
linh hoạt vì đặc tính hệ thống nằm đều bốn góc phần tư.Với hệ thống F - Đ khi lắp đặtt
chiếm diện tích lớn, cồng kềnh nhưng hiệu suất lại không cao. Khi làm việc lại gây tiếng
ồn, rung động mạnh, vốn lắp đặt cao.
Trong giai đoạn CNH - HĐH ngày nay với xu hướng chung vươn tới mục tiêu yêu
cầu tối ưu nhất đảm bảo tính khoa học gọn nhẹ, không gây tiếng ồn, ít ảnh hưởng đến
môi trường xung quanh.
Với hệ truyền động F - Đ mặc dù có nhiều ưu điểm nhưng còn nhiều hạn chế chưa
đáp ứng được yêu cầu CNH - HĐH. Ngày nay với nền công nghiệp hiện đại người ta dần
tiến hành thay thế hệ thống truyền động F - Đ bằng các hệ truyền động khác.
GVHD : Vũ Anh Tuấn 20 SVTH : Lê Viết Nghĩa
TRƯỜNG ĐHSPKT VINH ĐỒ ÁN MÔN TRANG BỊ
ĐIỆN
Với hệ truyền động T - Đ có hệ số khuếch đại lớn, dễ tự động hoá do tác động
nhanh chính xác, công suất tổn hao nhỏ, kích thước nhỏ và gọn nhẹ.
Xu hướng phát triển công nghệ tự động hoá các hệ thống tự động, gia công chính
xác nên điều khiển hệ thống được thực hiện bằng cách lắp ghép hệ thống với các bộ điều
khiển tự động như: PLC, vi xử lý
Nhìn chung hệ T - Đ đáp ứng được yêu cầu đặt ra. Với những ưu điểm và những
đặc điểm phù hợp cách truyền động.
Vậy em quyết định chọn phương án truyền động T - Đ.
IV.Chọn sơ bộ mạch động lực
1. Các sơ đồ nối dây của bộ chỉnh lưu có điều khiển
Trong kỹ thuật điện hiện nay có nhiều trường hợp phải sử dụng nguồn điện áp một
chiều có trị số thay đổi được để cung cấp cho các phụ tải khác nhau tuỳ thuộc mục đích
sử dụng. Các nguồn điện áp một chiều nhà máy phát điện một chiều, các bộ biến đổi tĩnh
(Khuyếch đại từ) có khá nhiều nhược điểm, trong đó có nhược điểm cơ bản là tổn thất
riêng khá lớn. Cùng với sự phát triển của kỹ thuật bán dẫn và vi mạch điện tử thì việc sử
dụng các bộ chỉnh lưu bán dẫn có điều khiển ngày càng được phổ biến và có nhiều ưu
việt.
a) Sơ đồ nối dây hình tia:
Hình
2-8: Sơ đồ nguyên lý hệ thống CL - Đ hình tia 3 pha và
sơ đồ thay thế
Đặc điểm của sơ đồ nối dây hình tia:
Số van chỉnh lưu bằng số pha của nguồn cung cấp
GVHD : Vũ Anh Tuấn 21 SVTH : Lê Viết Nghĩa
TRƯỜNG ĐHSPKT VINH ĐỒ ÁN MÔN TRANG BỊ
ĐIỆN
Các van có một điện cực cùng tên nối chung, điện cực còn lại nối với nguồn xoay
chiều. Nếu điện cực nối chung là katôt, ta có sơ đồ katôt chung, nếu điện cực nối chung
là anôt, ta có sơ đồ nối anôt chung.
Hệ thống điện áp nguồn xoay chiều m pha phải có điểm trung tính. trung tính nguồn
là điện cực còn lại của điện áp chỉnh lưu
b) Sơ đồ hình cầu
Đặc điểm của sơ đồ chỉnh lưu cầu:
Số van chỉnh lưu bằng 2 lần số pha của điện áp nguồn cung cấp, trong đó có m van có
katôt nối chung (các van 1, 3, 5) tạo thành cực dương của điện áp nguồn; m van có anôt
chung ( 2, 4, 6) tạo thành cực âm của điện áp chỉnh lưu
Mỗi pha của điện áp nguồn nối với 2 van, 1 ở nhóm anôt chung, 1 ở nhóm katôt
chung.
Hình 2-9: Sơ đồ nguyên lý hệ thống CL- Đ hình cầu 3 pha và sơ đồ thay thế
2. Nguyên lý làm việc của BBĐ xoay
chiều - một chiều
a) Sơ đồ tia:
GVHD : Vũ Anh Tuấn 22 SVTH : Lê Viết Nghĩa
TRƯỜNG ĐHSPKT VINH ĐỒ ÁN MÔN TRANG BỊ
ĐIỆN
Xét sơ đồ tia 3 pha katôt nối chung
Để một Thyristor mở cần có 2 điều kiện
Điện áp Anôt - Katôt phải dương
( U
A
> 0)
Có tín hiệu điều khiển đặt vào điện cực
điều khiển và Katôt của van
Do đặc điểm vừa nêu mà trong sơ đồ tia
3 pha các van chỉ mở trong một giới hạn nhất định.
Ví dụ: ở pha A, trong khoảng w
t
= 0 ¸ u
A
> 0. Tuy nhiên ở các khoảng w
t
= 0 ¸ p / 6 ,
u
C
> u
A
và w
t
= 5p/6¸ u
b
> u
A
Như vậy van T1 nối vào pha A chỉ có thể mở trong khoảng w
t
= p/6 ¸ 5p/6. Trong
khoảng này nếu tín hiệu đến cực điều khiển của T1 thì T1 mở. Tương tự với T2 và T3.
Thời điểm a
0
= w
t
= p/6 được gọi là thời điểm mở tự nhiên của sơ đồ chỉnh lưu 3 pha.
Nếu truyền tín hiệu mở van chậm hơn thời điểm mở tự nhiên một góc độ điện thì khoảng
dẫn dòng của van sẽ thay đổi (nhỏ hơn 2p/3) dẫn đến trị số trung bình của điện áp chỉnh
lưu sẽ giảm đi. Khi góc mở a càng lớn thì U
d
càng nhỏ
b) Sơ đồ cầu: Từ kết cấu của sơ đồ chỉnh lưu cầu ta có nhận xét: Để có dòng qua phụ
tải thì trong sơ đồ phải có ít nhất 2 van cùng thông, một ở nhóm anôt chung, một ở nhóm
katôt chung. Vậy với giả thiết là sơ đồ làm việc ở chế độ dòng liên tục và bỏ qua quá
trình chuyển mạch thì khi bộ chỉnh lưu cầu m pha làm việc, ở một thời điểm bất kỳ trong
sơ đồ luôn có 2 van có thể dẫn dòng khi có xung điều khiển: Van ở nhóm katôt chung nối
với pha có điện áp dương nhất và van ở nhóm anôt chung nối với pha có điện áp âm nhất.
Thời điểm mở tự nhiên của sơ đồ cầu cũng được xác định như đối với sơ đồ tia có số pha
tương ứng:
GVHD : Vũ Anh Tuấn 23 SVTH : Lê Viết Nghĩa
TRƯỜNG ĐHSPKT VINH ĐỒ ÁN MÔN TRANG BỊ
ĐIỆN
Để điều khiển điện áp chỉnh lưu trên phụ tải một chiều ta thay đổi thời điểm đưa xung
điều khiển đến các cực điều khiển của các van, làm thay đổi khoảng dẫn dòng của van
làm điện áp trung bình của chỉnh lưu thay đổi.
Đặc điểm của các sơ đồ hình tia là ngoài các thời gian chuyển mạch các van ứng với
γ
(là khoảng thời gian khi một van nào đó đang ngừng làm việc và van tiếp sau đang bắt
đầu làm việc )dòng điện phụ tải i
d
bằng dòng điện trong van đang mở. Do đó dòng điện
trong mạch phụ tải được xác định bởi sức điện động pha làm việc của máy biến áp, còn
độ sụt áp trong bộ biến đổi thì được xác định bởi độ sụt áp trên pha đó.
Ở sơ đồ cầu, bên ngoài chu kỳ chuyển mạch vẫn có hai van làm việc đồng thời. Dòng
điện phụ tải chảy liên tiếp qua hai van và hai pha của máy biến áp dưới tác dụng của hiệu
số sức điện động của các van tương ứng, nghĩa là dưới tác dụng của sức điện động dây.
Sau một chu kỳ biến thiên của điện áp xoay chiều cả sáu van của bộ biến đổi đều tham
gia làm việc.
Trị số trung bình của sức điện động chỉnh lưu E
d
ở trạng thái dòng điện liên tục được
xác định như sau:
E
d
= E
đm
cos
α
Trong đó E
đm
là trị số cực đại của sức điện động chỉnh lưu ứng với trường hợp
0
=
α
Với sơ đồ 3 pha hình tia trị số cực đại của sức điện động chỉnh lưu là: E
đm1
=1,17E
2f
. Với sơ đồ cầu là E
đm2
=2,34E
2f
Trong đó E
2f
là trị số hiệu dụng của s.đ.đ pha thứ cấp máy biến áp
Kết luận: Để phù hợp với yêu cầu của đề tài thì ta chọn bộ chỉnh lưu cầu 3 pha.
3. Dòng điện chỉnh lưu trên phụ tải một chiều
Do điện áp chỉnh lưu lặp đi lặp lại 2m (hoặc m) lần trong một chu kỳ của điện áp nguồn
nên ở chế độ xác lập thì dòng qua tải cũng lặp đi lặp lại như vậy (tuỳ thuộc sơ đồ chỉnh l-
GVHD : Vũ Anh Tuấn 24 SVTH : Lê Viết Nghĩa
TRƯỜNG ĐHSPKT VINH ĐỒ ÁN MÔN TRANG BỊ
ĐIỆN
ưu là tia hay cầu, số pha chẵn hay lẻ). Như vậy chỉ cần biết dòng và áp trên tải trong
khoảng thời gian là 1/m chu kỳ hay là tương đương góc độ điện 2p / q ( q=2m hoặc q =
m). Để xác định dòng và áp trên tải ta dựa vào sơ đồ thay thế của chỉnh lưu trong một
khoảng thời gian làm việc của một van.
Hình 2- 10: Sơ đồ thay thế của chỉnh lưu trong
khoảng thời gian làm việc của van
U: tổng đại số điện áp nguồn xoay chiều tác động trong mạch vòng nối với các van
đang dẫn dòng trong sơ đồ ở thời gian đang xét.
Nếu là sơ đồ tia thì chỉ có 1 van mở, u = u
f
.
Nếu là sơ đồ cầu thì có 2 van ở 2 pha khác nhau cùng làm việc, u = u
d
.
Nếu chọn mốc thời gian xét t = 0 là thời điểm bắt đầu mở một van trong sơ đồ thì u =
U
m
.sin(wt + y)
+ U
m
- Biên độ điện áp nguồn (pha hoặc dây)
+ y - góc pha đầu, được xác định: y = p / 2 - p / q
+ a
T đặc trưng cho van đang dẫn dòng, ở sơ đồ tia là 1 van, sơ đồ cầu là 2 van nối tiếp
nhau, bỏ qua sụt áp trên van
E
d
, R
d
, L
d
là các phần tử của phụ tải
U
d
, I
d
- dòng và áp trên tải.
Phương trình cân bằng điện áp từ sơ đồ thay thế:
dm
d
ddd
EtU
dt
di
LiR
−+=+
)sin(
ψω
(2-5)
Giải phương trình này ta nhận được biểu thức của dòng điện chỉnh lưu:
]
)(1
)sin(
1[]
)(1
)sin(
1[
2
/
2
0
ωτ
ωτψϖ
ωτ
ωτψ
τ
+
−+
−−
+
−
−+=
−
arctgt
Ie
arctg
Iii
m
t
md
(2-6)
GVHD : Vũ Anh Tuấn 25 SVTH : Lê Viết Nghĩa