Ebook Quantum field theory III: Gauge theory - Part 2
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (4.67 MB, 570 trang )
9. Applications of Invariant Theory to the
Rotation Group
Geometry has to be independent of the choice of the observer.
Folklore
9.1 The Method of Orthonormal Frames on the
Euclidean Manifold
We want to use the method of orthonormal frames in order to define
• the gradient grad Θ of a smooth temperature field Θ, and
• both the divergence, div v, and the curl, curl v, of a smooth velocity vector field
v on the Euclidean manifold E3 .
The physical meaning of grad Θ, div v, and curl v will be discussed in Sect. 9.1.4.
Einstein’s summation convention. In this chapter,
we sum over equal upper
P
and lower indices from 1 to 3. For example, xi ei = 3i=1 xi ei .
9.1.1 Hamilton’s Quaternionic Analysis
Consider a fixed right-handed Cartesian (x, y, z)-coordinate system of the Euclidean
manifold E3 with the right-handed orthonormal basis i, j, k at the origin P0 . Let
iP , jP , kP be a right-handed orthonormal basis of the tangent space TP E3 at the
point P , which is obtained from the basis vectors at the origin i, j, k by translation
(Fig. 9.1). In about 1850, Hamilton (1805–1865) introduced the differential operator
D :=
∂
∂
∂
∂
+
iP +
jP +
kP
∂t
∂x
∂y
∂z
and applied it to the quaternionic function
Q(t, x, y, z) := Θ(t, x, y, z) + u(t, x, y, z)iP + v(t, x, y, z)jP + w(t, x, y, z)kP .
The point P has the Cartesian coordinates (x, y, z). To simplify notation, we replace
iP , jP , kP by i, j, k, respectively. Furthermore, we set
∂
∂
∂
• ∇ := ∂x
i + ∂y
j + ∂x
k (Hamilton’s nabla operator), and
• v(P ) := u(P )i + v(P )j + w(P )k.
Finally, since the symbol ∇i denotes the covariant partial derivative in modern
tensor analysis, we replace the vector symbol ∇ by
∂ :=
∂
∂
∂
i+
j+
k.
∂x
∂y
∂z
E. Zeidler, Quantum Field Theory III: Gauge Theory,
DOI 10.1007/978-3-642-22421-8 10,
© Springer-Verlag Berlin Heidelberg 2011
557
558
9. Applications of Invariant Theory to the Rotation Group
Fig. 9.1. Orthonormal basis of the tangent space TP E3
Setting ∂t :=
∂
,
∂t
we get
D = ∂t + ∂
and
Q(t, P ) = Θ(t, P ) + v(t, P ).
Hamilton investigated the quaternionic product
D · Q = (∂t + ∂) · (Θ + v) = ∂t Θ + ∂t v + ∂Θ − ∂v + ∂ × v.
This way, we get
i + ∂Θ
j + ∂Θ
k (gradient of the temperature field Θ),
• ∂Θ = grad Θ := ∂Θ
∂x
∂y
∂z
∂u
∂v
∂w
• ∂v = div v := ∂x + ∂y + ∂z (divergence of the velocity vector field v),
• ∂ × v = curl v (curl of the velocity vector field v). Explicitly,
˛
˛
˛ i j k˛
˛
˛
˛∂ ∂ ∂˛
curl v := ˛ ∂x
.
(9.1)
∂y ∂z ˛
˛
˛
˛ u v w˛
Hence
„
«
„
«
„
«
∂w
∂v
∂u
∂w
∂v
∂u
curl v =
−
i+
−
j+
−
k.
∂y
∂z
∂z
∂x
∂x
∂y
”
“
∂
∂
∂
+ v ∂y
+ w ∂z
Θ. Here, (v(P ) grad)Θ(P ) is called
• (v∂)Θ = (v grad)Θ := u ∂x
the directional derivative of the temperature field Θ at the point P in direction
of the velocity vector v(P
“ ) at the point P . ”
∂
∂
∂
• (v∂)E := (v grad)E = u ∂x
+ v ∂y
+ w ∂z
E. Here, (v(P ) grad)E(P ) is called
the directional derivative of the electric field E at the point P in direction of the
velocity vector v(P )“ at the point P . ”
• ΔΘ = −∂ 2 Θ := −
ture field Θ).1
• ΔE = −∂ 2 · E := −
∂2
∂2 x
“
+
∂2
∂2x
∂2
∂2y
+
+
∂2
∂2y
∂2
∂2 z
+
∂2
∂2 z
Θ (Laplacian Δ applied to the tempera-
”
E.
The definitions of
grad Θ, div v, curl v, (v grad)Θ, (v grad)E, ΔΘ, ΔE
given above depend on the choice of the right-handed Cartesian (x, y, z)-coordinate
system.
1
Concerning our sign convention for the Laplacian, see page 471.
9.1 The Method of Orthonormal Frames
559
However, we will show below that the definitions are indeed independent of
the choice of the right-handed Cartesian coordinate system.
To this end, we will use the method of orthonormal frames which is the prototype
for the use of invariant theory in geometry and analysis. The idea of this method
is to define quantities for a fixed right-handed Cartesian coordinate system. Then
we show next that the quantity under consideration is independent of the choice of
the right-handed Cartesian coordinate system. To this end, we set
x1 := x, x2 := y, x3 := z,
∂i :=
∂
∂xi
and
e1 := i, e2 := j, e3 := k.
9.1.2 Transformation of Orthonormal Frames
To begin with, let us study the change of orthonormal systems. Let e1 , e2 , e3 be a
right-handed orthonormal system in the Euclidean Hilbert space E3 . Furthermore
choose three arbitrary vectors e1 , e2 , e3 in E3 such that
0 1
0 1
e1
e1
B C
B C
(9.2)
@e2 A = G @e2 A
e3
e3
where G is an invertible real (3 × 3)-matrix.
Proposition 9.1 The transformed vectors e1 , e2 , e3 form a right-handed orthonormal basis in the Euclidean space E3 iff the transformation matrix G is an
element of the Lie group SO(3), that is, GGd = I and det G = 1.
Proof. (I) Let e1 , e2 , e3 be a right-handed orthonormal system. Then, we have
the orthonormality condition,
ei ej = δi
j
,
i, j = 1, 2, 3,
and the volume product satisfies the relation (e1 e2 e3 ) = 1 because of the righthanded orientation. Hence
0
0 1
1 0
1
e1 e1 e1 e2 e1 e3
e1 “
100
”
B
B C
C B
C
@e2 A e1 , e2 , e3 = @e2 e1 e2 e2 e2 e3 A = @0 1 0A = I.
e3
e3 e1 e3 e2 e3 e3 .
001
This is equal to
1
e1 “
”
B C
G @e2 A e1 , e2 , e3 Gd = GIGd = GGd .
e3
0
Hence GGd = I. Finally, by (9.2), we get
1 = (e1 e2 e3 ) = det G · (e1 e2 e3 ) = det G.
(II) Conversely, if GGd = I and det G = 1, then the same argument shows that
✷
e1 , e2 , e3 is a right-handed orthonormal system.
560
9. Applications of Invariant Theory to the Rotation Group
Corollary 9.2 The vectors e1 , e2 , e3 form a left-handed orthonormal basis in the
Euclidean space E3 iff the transformation matrix G is an element of the Lie group
O(3) (that is, GGd = I) with det G = −1.
Proof. Note that (e1 e2 e3 ) = −1 if e1 , e2 , e3 is a left-handed orthonormal basis.
✷
Set x = xi ei . Here, x1 , x2 , x3 are the coordinates of the position vector
x with respect to the basis e1 , e2 , e3 . By (2.84) on page 164, it follows from
xi ei = xi ei that
0 1
0 1
x1
x1
B 2C
−1 d B 2 C
=
(G
(9.3)
)
@x A .
@x A
3
3
x
x
If e1 , e2 , e3 is an orthonormal basis, then (G−1 )d = G. This implies the following
specific property of orthonormal frames (without taking orientation into account).
Proposition 9.3 Under a change of orthonormal frames, the three basis vectors
e1 , e2 , e3 and the corresponding Cartesian coordinates x1 , x2 , x3 transform themselves in the same way.
9.1.3 The Coordinate-Dependent Approach (SO(3)-Tensor
Calculus)
We are now able to prove the main result of Hamilton’s vector analysis.
Theorem 9.4 The definitions of grad Θ, div v, curl v, (v grad)Θ, (v grad)E,
ΔΘ, and ΔE do not depend on the choice of the right-handed Cartesian coordinate
system.
Proof. The passage from a right-handed Cartesian coordinate system to another
right-handed Cartesian coordinate system corresponds to an SO(3)-transformation.
Therefore, we will use the SO(3)-tensor calculus introduced on page 453. In particular, we have the form-invariant tensorial families
δij , δ ij , δji , εijk , εijk .
(9.4)
The basis vectors ei transform like a tensorial family. Lifting and lowering of indices
can be performed by means of δ ij and δij . For example, ei := δ ij ej . Furthermore,
since the transformation formula for the coordinates xi is given by a matrix which
does not depend on the position of the point on the Euclidean manifold E3 , the
differential operator ∂i sends tensorial families again to tensorial families. Note that
• v := v i ei , E = E i ei ,
• grad Θ = ∂i Θ · ei , div v = ∂i v i , curl v = εijk ∂i vj · ek ,
• (v grad)Θ = v i ∂i Θ, (v grad)E = (v i ∂i )E j ej ,
• ΔΘ = −δ ij ∂i ∂j Θ = −∂ j ∂j Θ, , ΔE = −(δ ij ∂i ∂j )E k ek .
9.1 The Method of Orthonormal Frames
561
Fig. 9.2. Measuring velocity vector fields
All the expressions do not have any free indices. Thus, the claim follows immediately
from the principle of index killing.
✷
If we allow the use of both right-handed and left-handed Cartesian coordinate
systems, then we have to pass to the O(3)-tensor calculus. Let us assign to righthanded (resp. left-handed) coordinate systems the orientation number ι = 1 (resp.
ι = −1). Then we have to use the O(3)-tensorial families
δij , δ ij , δji , ι · εijk , ι · εijk , ei , xi .
In particular, we write
curl v = ι · εijk ∂i vj ek .
All the other expressions considered above remain unchanged. In addition, for the
vector product we get
v × w = ι · εijk v i wj ek .
Examples. Let a be a real number, andplet a, ω be fixed vectors. Furthermore, let
x := xi + yj + zk, as well as r := |x| = x2 + y 2 + z 2 . Then:
• grad(ax) = a,
• grad U (r) = U (r) xr ,
` ´
• div a3 x = a,
• div(U (r)x) = 3U (r) + rU (r),
ã curl( 12 ì x) = .
9.1.4 The Coordinate-Free Approach
The physical interpretation of the temperature gradient grad Θ. This will
be discussed in Sect. 10.1 on page 645. Roughly speaking, the vector grad Θ(P )
points to the direction of the maximal growth of the temperature Θ at the point
P , and the length of the vector grad Θ(P ) measures the maximal growth rate of
the temperature Θ at the point P .
The physical interpretation of div v and curl v. Let v be a smooth velocity
vector field defined in an open neighborhood of the point P0 in the Euclidean
manifold E3 . So far, we have defined div v and curl v by using a right-handed
Cartesian coordinate system. It follows from tensor analysis that this definition
does not depend on the choice of the right-handed Cartesian coordinate system. It
is also possible to determine div v and curl v in an invariant way by the following
limits (Fig. 9.2).
562
9. Applications of Invariant Theory to the Rotation Group
Fig. 9.3. Special velocity vector fields
Theorem 9.5 Consider a ball of radius R about the point P0 . Contracting the ball
to the point P0 , we get
Z
3
vn dS.
div v(P0 ) = lim
R→0 4πR3 S2 (P )
0
R
Here, n denotes the outer unit normal vector on the boundary of the ball. Similarly,
consider a disk of radius R about the point P0 which is perpendicular to the unit
vector n. Contracting the disk to the point P0 , we get
Z
1
vdx.
n curl v(P0 ) = lim
2
R→0 πR
S1 (P0 )
R
Proof. By the mean theorem for integrals,
Z
4πR3
div v(P1 )
div v dxdydz =
3
|x−x0 |≤R
where P1 is a suitable point of the ball of radius R about the point P0 . The Gauss–
Ostrogradsky integral theorem on page 680 tells us that
Z
Z
3
3
div
v
dxdydz
=
nv dS.
4πR3 |x−x0 |≤R
4πR3 S2 (P0 )
R
Letting R → 0, we get div v(P0 ). Similarly, we obtain n curl v(P0 ) by using the
Stokes integral theorem on page 680:
Z
Z
n curl v dS =
vdx.
B2
R (P0 )
S1
R (P0 )
✷
Examples. Choose the origin, P0 := O. Consider the smooth map P → vP . In
terms of physics, this is a smooth velocity vector field on the Euclidean manifold
E3 . By definition, the streamline t → x(t) passing through the point P0 at time t0
is given by the solution of the differential equation
˙
x(t)
= v(x(t)),
t ∈ J,
x(t0 ) = x0 ,
where J is an open interval on the real line which contains the point t0 .
Let us consider the prototypes of velocity vector fields.
(9.5)
9.1 The Method of Orthonormal Frames
563
Fig. 9.4. Rotational velocity vector field
• Source at the origin (Fig. 9.3(a)): Choose the velocity vector field v(x) :=
with a > 0 . Then
Z
Z
3
aR
3
vn
dS
=
·
dS = a.
4πR3 S2 (O)
4πR3 3 S2 (O)
R
a
x
3
R
Letting R → 0, we get div v(O) = a, by Theorem 9.5. The origin is a source for
the streamlines of the velocity vector field, and div v(O) measures the strength
of this source.
• Sink at the origin (Fig. 9.3(b)): Let a < 0. Again we get div v(O) = a. In this
case, the origin is a sink for the streamlines of the velocity vector field.
• Circulation around the z-axis (Fig. 9.4): Let us choose a right-handed Cartesian
(x, y, z)-coordinate system with the right-handed orthonormal basis i, j, k at the
origin O. Let ω := ωk with ω > 0. Consider the velocity vector field
v(x) := 12 (ω × x).
This corresponds to the counter-clockwise rotation of fluid particles about the
z-axis with the angular velocity ω. The streamlines are circles parallel to the
(x, y)-plane centered at points of the z-axis.
Since the velocity vectors are tangent vectors to the streamlines, we get
Z
Z
1
1
ωR2
vdx
=
·
ds = ω.
πR2 S1 (O)
πR2
2
S1 (O)
R
R
Letting R → 0, we get k curl v(O) = ω, by Theorem 9.5. Thus, the z-component
of the vector curl v(O) measures the angular velocity of the fluid particles near the
origin.
9.1.5 Hamilton’s Nabla Calculus
To begin with, let us summarize the key relations in classical vector calculus. Let
Θ, Υ : R3 → R and v, w : R3 → E3 be smooth temperature functions and smooth
velocity vector fields, respectively.
Proposition 9.6 The following hold:
(i) curl grad Θ = 0,
(ii) div curl v = 0,
(iii) grad(Θ + Υ ) = grad Θ + grad Υ ,
(iv) grad(ΘΥ ) = (grad Θ)Υ + Θ grad Υ,
564
9. Applications of Invariant Theory to the Rotation Group
(v) grad(vw) = (v grad)w + (w grad)v + v × curl w + w × curl v,
(vi) div(v + w) = div v + div w,
(vii) div(Θv) = v(grad Θ) + Θ div v,
(viii) div(v × w) = w curl v − v curl w,
(ix) curl(v + w) = curl v + curl w,
(x) curl(Θv) = (grad Θ) × v + Θ curl v,
(xi) curl(v × w) = (w grad)v − (v grad)w + v div w − w div v,
(xii) ΔΘ = − div grad Θ,
(xiii) Δv = curl curl v − grad div v,
(xiv) 2(v grad)w is equal to
grad(vw) + v div w − w div v − curl(v × w) − v × curl w − w × curl v.
(xv) v(x + h) = v(x) + (h grad)v(x) + o(|h|), h → 0 (Taylor expansion).
The relations (xii)–(xiv) show that ΔΘ, Δv and (v grad)w can be reduced
to ‘grad’, ’div’, and ‘curl’. All the relations (i)–(xiv) above can be verified by
straightforward computations using a right-handed Cartesian coordinate system.
However, the nabla calculus works more effectively. In this connection, we take into
∂
∂
∂
+ j ∂y
+ k ∂z
is both a differential operator
account that the nabla operator ∂ = i ∂x
and a vector. Therefore, mnemonically, we will proceed as follows:
• Step 1: Apply the Leibniz product rule by decorating the terms with dots.
• Step 2: Use algebraic vector operations in order to move all the dotted (resp.
undotted) terms to the right (resp. left) of the nabla operator ∂.
Proof. Ad (i), (ii). It follows from a × Θa = 0 and a(a × b) = 0 that
∂ × ∂Θ = 0
and
∂(∂ × v) = 0.
Hence curl grad Θ = 0 and div curl v = 0.
Ad (iv). By the Leibniz product rule,
˙ ) + ∂(ΘΥ˙ ).
∂(ΘΥ ) = ∂(ΘΥ
Moving the undotted quantities to the left of the nabla operator, we get
˙ + Θ(∂ Υ˙ ).
∂(ΘΥ ) = Υ (∂ Θ)
Hence grad(ΘΥ ) = Υ grad Θ + Θ grad Υ.
Ad (xi). By the Leibniz rule,
˙
∂ × (v × w) = ∂ × (v˙ × w) + ∂ × (v × w).
Using the Grassmann expansion formula a × (b × c) = b(ac) − c(ab), we get
˙
˙ + v(∂ w)
˙ − w(∂v).
˙
∂ × (v × w) = v(∂w)
− w(∂ v)
Finally, moving the undotted terms to the left of the nabla operator ∂ by respecting
the rules of vector algebra, we get
˙ + v(∂ w)
˙ − (v∂)w.
˙
∂ × (v × w) = (w∂)v˙ − w(∂ v)
This is the claim (xi).
Ad (v). Use the Grassmann expansion formula b(ac) = a(bc) + a × (b × c).
The remaining proofs are recommended to the reader as an exercise.
✷
9.1 The Method of Orthonormal Frames
565
9.1.6 Rotations and Cauchy’s Invariant Functions
Consider a right-handed Cartesian (x, y, z)-coordinate system with the right-handed
orthonormal basis e1 , e2 , e3 . Let x, y, z ∈ E3 , and let x = xi ei , y = y i ei , and
z = z i ei . Then the inner product
xy = δij xi y j
and the volume product
(xyz) = εijk xi yj z k
are invariants under the change of right-handed Cartesian coordinate systems. If we
consider the more general case of arbitrary Cartesian (x, y, z)-coordinate systems
with an arbitrary orthonormal basis e1 , e2 , e3 , then the inner product xy remains
an invariant. However, this is not true anymore for the volume product (xyz) which
changes sign under a change of orientation. One of the main results of classic invariant theory tells us that these invariants are the only ones in Euclidean geometry.
Let us formulate this in precise terms.
The Cauchy theorem on isotropic functions. The real-valued function
f : E3 × · · · × E3 → R is called isotropic iff
f (Gx1 , . . . , Gxn ) = f (x1 , . . . , xn )
(9.6)
for all vectors x1 , . . . , xn ∈ E3 and all unitary operators G ∈ U (E3 ). Moreover, the
function f is called proper isotropic iff we have the relation (9.6) for all rotations
G ∈ SU (E3 ). Note that a function is isotropic iff it is invariant under all rotations
and reflections x → −x.
Theorem 9.7 (i) If the function f is isotropic, then it only depends on all the
possible inner products
xi xj ,
i, j = 1, . . . , n.
(9.7)
(ii) If the function f is proper isotropic, then it only depends on all the possible
inner products (9.7), and all the possible volume products (xi xj xk ), i, j, k = 1, . . . , n.
The polynomial ring of invariants. The function f : E3 × · · · × E3 → R
considered above is called a polynomial function iff it is a real polynomial with
respect to the Cartesian coordinates of the vectors x1 , . . . , xn . Since the change of
Cartesian coordinates is described by linear transformations, this definition does
not depend on the choice of the Cartesian coordinate system.
Corollary 9.8 If the polynomial function f is proper isotropic, then it is a real
polynomial of all the possible inner products xi xj , i, j = 1, . . . , n, and all the possible
volume products (xi xj xk ), i, j, k = 1, . . . , n.
For the classic proofs of Theorem 9.7 and Corollary 9.8, we refer to the references
given in Problem 9.5.
Examples. (a) Every proper isotropic, polynomial function f : E3 → R has
the form
for all x ∈ E3
f (x) = p(x2 )
where p is a polynomial of one variable with real coefficients. Such a function is
also isotropic.
(b) Every proper isotropic, polynomial function f : E3 × E3 → R has the form
566
9. Applications of Invariant Theory to the Rotation Group
f (x, y) = p(x2 , y2 , xy),
for all
x, y ∈ E3
2
where p is a real polynomial of three variables. Such a function is also isotropic.
(c) Every proper isotropic, polynomial function f : E3 × E3 × E3 → R has the
form
f (x, y, z) = p(x2 , y2 , z2 , xy, xz, yz, (xyz))
for all vectors x, y, z ∈ E3 . Here, p is a real polynomial of seven variables.
(d) Set f (x, y, z) := (xyz)2 . This polynomial function is isotropic. By Theorem
9.7, we know that f only depends on all the possible inner products of the vectors
x, y, z. Explicitly,
˛
˛
˛ x2 xy xz˛
˛
˛
˛
˛
f (x, y, z) = ˛yx y2 yz˛ .
˛
˛
2
˛ zx zy z ˛
This is the Gram determinant.
Let P(SU (E3 )) denote the set of all the real polynomials with respect to the
variables
xi xj , (xi xj xk ),
i, j, k = 1, . . . , n, n = 1, 2, . . .
This set is closed under addition and multiplication, hence it is a commutative ring.
The commutative ring P(SU (E3 )) is called the polynomial ring of invariants of the
Lie group SU (E3 ).
The Rivlin–Ericksen theorem on isotropic, symmetric tensor functions in elasticity theory. Let Lsym (E3 ) denote the set of all linear self-adjoint
operators
A : E3 → E3
on the real Hilbert space E3 . The linear operator T : Lsym (E3 ) → Lsym (E3 ) is
called an isotropic tensor function iff we have
R−1 T (A)R = T (R−1 AR)
for all linear operators A ∈ Lsym (E3 ) and all rotations R ∈ SU (E3 ).
Theorem 9.9 Let T be an isotropic tensor function. Then there exist real functions
a, b, c : R3 → R such that
T (A) = aI + bA + cA2
for all
A ∈ Lsym (E3 )
2
where a = a(tr(A), tr(A ), det A) together with analogous expressions for b and c.
Note the following: If λ1 , λ2 , λ3 are the eigenvalues of the operator A, then
tr(A) = λ1 + λ2 + λ3 ,
tr(A2 ) = λ21 + λ22 + λ23 ,
det(A) = λ1 λ2 λ3 .
The proof of Theorem 9.9 together with applications to the formulation of general
constitutive laws for elastic material (generalizing the classic Hooke’s law) can be
found in Zeidler (1986), p. 204, quoted on page 1089.3
2
3
Note that (xxy) = (yyx) = 0. Therefore, the volume products disappear.
R. Rivlin and J. Ericksen, Stress-deformation relations for isotropic materials, J.
Rat. Mech. Anal. 4 (1955), 681–702.
9.2 Curvilinear Coordinates
567
9.2 Curvilinear Coordinates
Mathematicians and physicists use curvilinear coordinates in order to simplify computations based on symmetry.
Folklore
9.2.1 Local Observers
Let us consider the Euclidean manifold E3 . Fix a right-handed Cartesian (x, y, z)coordinate system equipped with the right-handed orthonormal basis iP , jP , kP at
the point P of E3 . The orthonormal basis at the origin P0 is denoted by i, j, k. As
depicted in Fig. 9.1 on page 558, the vectors iP , jP , kP are obtained from i, j, k by
parallel transport. The change of coordinates is described by the equation
xi = xi (x, y, z),
(x, y, z) ∈ O+ .
i = 1, 2, 3,
Suppose that
• the set O+ (resp. O) is a nonempty, open, arcwise connected subset of R3 , and
• the map (x, y, z) → (x1 , x2 , x3 ) is a diffeomorphism from O+ onto the subset O
of R3 .
In terms of physics, the observer O+ (resp. O) measures the coordinates (x, y, z)
(resp. (x1 , x2 , x3 )) of the point P ∈ E3 . We set x1+ := x, x2+ := y, and x3+ := z.
Typical transformation laws. The following transformation laws are crucial.
(i) Temperature field Θ: The observer O+ (resp. O) measures the temperature
Θ(x, y, z) (resp. Θ(x1 , x2 , x3 )). By the chain rule,
∂xi+ (P ) ∂Θ(P )
∂Θ(P )
=
·
.
i
∂x
∂xi
∂xi+
This is the transformation law for the temperature derivatives. The transformation law from the observer O to the observer O reads as
∂xi (P ) ∂Θ(P )
∂Θ(P )
=
·
.
∂xi
∂xi
∂xi
This shows that ∂i Θ is a tensorial family.
(ii) Velocity components x˙ i (t): Let the parameter t denote time. The observer O+
(resp. O) measures the curve
x = x(t),
y = y(t),
z = z(t),
i = 1, 2, 3,
(resp. xi = xi (x(t), y(t), z(t)), i = 1, 2, 3). Set x˙ i (t) :=
rule, differentiation with respect to time t yields
x˙ i (t) =
∂xi (P (t)) i
· x˙ + (t),
∂xi+
t ∈ ] − t0 , t0 [
dxi (t)
.
dt
Using the chain
i = 1, 2, 3.
This is the transformation law for the velocity components. The transformation
law from the observer O to the observer O reads as
x˙ i (t) =
∂xi (P (t)) i
· x˙ (t),
∂xi
This shows that x˙ i (t) is a tensorial family.
i = 1 ,2 ,3 .
568
9. Applications of Invariant Theory to the Rotation Group
Fig. 9.5. Curvilinear coordinates
+
+
The natural frame. Set b+
1 (P ) := iP , b2 (P ) := jP , b3 (P ) := kP . We define
bi (P ) :=
∂xi (P ) +
bi (P ),
∂xi+
i = 1, 2, 3.
The vectors b1 (P ), b2 (P ), b3 (P ) form a basis at the point P . This basis of the
tangent space TP E3 of the Euclidean manifold E3 at the point P is called the
natural basis of the observer O at the point P . In terms of geometry, the basis
vector b1 (P ) is the tangent vector of the curve
`
´
t → x(t, x2 , x3 ), y(t, x2 , x3 ), z(t, x2 , x3 )
at the point P . This curve is called the x1 -coordinate line passing through the point
P (Fig. 9.5(b)). Similarly, we get the basis vectors b2 (P ) (resp. b3 (P )) as tangent
vectors of the x2 -coordinate (resp. x3 -coordinate) line. Passing to another observer
O , the chain rule yields the following transformation law from the observer O to
the observer O :
bi (P ) =
∂xi (P )
bi (P ),
∂xi
i = 1 ,2 ,3 .
This shows that bi is a tensorial family. A vector field on the Euclidean manifold
is given by
v(P ) = v i (P ) bi (P ).
Since v(P ) is an invariant quantity, it follows from the inverse index principle that
v i is a tensorial family.
The natural coframe. Fix the point P , and define
dxi (v(P )) = v i (P ),
i = 1, 2, 3.
Then, the map dxi : TP E3 → R is a linear functional, and dx1 , dx2 , dx3 is a basis of
the cotangent space TP∗ E3 . The functionals dxi are transformed like v i . Thus, dxi
is a tensorial family.
9.2.2 The Metric Tensor
For the observer O, we define
gij (P ) := bi (P )bj (P ),
i, j = 1, 2, 3.
(9.8)
9.2 Curvilinear Coordinates
569
For the vectors v(P ) = v i (P )bi (P ) and w(P ) = wi (P )bi (P ), the inner product
reads as
v(P )w(P ) = v i (P )gij wj (P ).
Recall that g(P ) := det(gij (P )). The metric tensor field is given by
gP = gij (P ) dxi ⊗ dxj .
For the observer O+ , we get
+
+
gij
(P ) = b+
i (P )bj (P ) = δij ,
i, j = 1, 2, 3.
Hence
gP = δij dxi+ ⊗ dxj+ = dx ⊗ dx + dy ⊗ dy + dz ⊗ dz,
and g = det(δij ) = 1. By the index principle, gP does not depend on the choice of
the observer.
9.2.3 The Volume Form
Using the metric tensorial family gij , we are able to introduce the volume form υ
of the Euclidean manifold E3 by setting
υ(P ) := ι · Eijk (P ) dxi ∧ dxj ∧ dxk .
√
Recall that Eijk = g εijk , and ι denotes the orientation number of the local
1
2
3
(x , x , x )-coordinate system. Explicitly,4
„
«
∂(x1 , x2 , x3 )
ι := sgn
(P ) ,
P ∈ O+ .
∂(x, y, z)
Since the set O+ is arcwise connected, the number ι does not depend on the choice
of the point P in O+ . Recall that ι · Eijk is a tensorial family (see page 463). Thus,
the differential form υ is an invariant, by the index principle. That is, the differential
form υ does not depend on the choice of the observer (local coordinates). For the
observer O+ , we get
υ = dx ∧ dy ∧ dz.
9.2.4 Special Coordinates
Let us consider typical examples for curvilinear coordinates, namely, cylindrical
coordinates, polar coordinates, and spherical coordinates. We distinguish between
• singular coordinates (i.e., the metric matrix (gij (P )) is not invertible at all the
points P , and hence the transformation law is not generated by a diffeomorphism), and
• regular coordinates (i.e., the transformation law is generated by a diffeomorphism).
From the general point of view, one has to use only regular coordinates. However,
from the practical point of view, one frequently uses singular coordinates. In a
rigorous setting, one has to use regular coordinates combined with a limit process
at the singular points of the coordinates (e.g., the North Pole and the South Pole
of earth are singular points with respect to spherical coordinates; see (9.12)).
”−1
“
1 2 3
,x ,x )
∂(x,y,z)
4
Note that ∂(x
= ∂(x
. This follows from the fact that the
1 ,x2 ,x3 )
∂(x,y,z)
transformation (x, y, z) → (x1 , x2 , x3 ) is a diffeomorphism.
570
9. Applications of Invariant Theory to the Rotation Group
Cylindrical Coordinates
Cylindrical coordinates are used for studying physical systems which are symmetric
under rotations about the z-axis.
Singular cylindrical coordinates. The basic transformation law reads as
x = cos ϕ,
y = sin ϕ,
z=z
(9.9)
where −π ≤ ϕ ≤ π, ≥ 0, and −∞ < z < ∞ (see Fig. 9.5(a) on page 568). Here,
we set x1 := , x2 := ϕ, and x3 := z.
Regular cylindrical coordinates. Note that the map
(x, y, z) → ( , ϕ, z)
(9.10)
is not a diffeomorphism defined on the set R . In fact, this map is not bijective,
since the point x = −1, y = z = 0 has the two angular coordinates ϕ = π and
ϕ = −π. To cure this defect, we choose a subset O of R3 . Explicitly,
3
O := R3 \ {(x, y, z) : x ≤ 0, y = 0, −∞ < z < ∞}.
This means that we remove a closed half-plane spanned by the negative x-axis and
the z-axis. Then the map (9.10) is a diffeomorphism from O+ onto the set
O := {( , ϕ, z) ∈ R3 :
> 0, −π < ϕ < π, −∞ < z < ∞}.
For the Jacobian, we get
˛
˛ ˛
˛
˛x x x ˛ ˛cos ϕ − sin ϕ 0˛
ϕ z˛
˛
˛
˛
∂(x, y, z)
˛
˛ ˛
˛
= ˛ y yϕ yz ˛ = ˛ sin ϕ
cos ϕ 0˛ = .
˛
˛ ˛
˛
∂( , ϕ, z)
˛ z zϕ zz ˛ ˛ 0
0
1˛
The sign of the Jacobian equals the orientation number ι. Since
> 0, we get
ι=1
for the orientation number of cylindrical coordinates.
The natural frame. Using x = xiP + yjP + zkP , we get
• b1 (P ) = x = cos ϕ iP + sin ϕ jP ,
• b2 (P ) = xϕ = (− sin ϕ iP + cos ϕ jP ),
• b3 (P ) = xz = kP .
The vectors b1 (P ), b2 (P ), b3 (P ) form the natural basis of cylindrical coordinates at
the point P (see Fig. 9.5(a) on page 568). The vector b3 (P ) points to the direction
of the z-axis. Note the following peculiarity: The basis vectors b1 (P ), b2 (P ), b3 (P )
form an orthogonal system, but they do not form an orthonormal system. For
example, the vector b2 (P ) is not a unit vector if = 1.
It is not wise, to normalize the natural basis vectors of curvilinear coordinate systems.
In fact, normalization destroys the beauty of the index principle in mathematical
physics to be discussed in Sect. 9.3.2 on page 575.
The metric tensor. Setting gij := bi bj , we obtain
0
1
1 0
g11 g12 g13
1 0 0
B
C
C B
@g21 g22 g23 A = @0 2 0A .
g31 g32 g33
0 0 1
9.2 Curvilinear Coordinates
Thus, g = det(gij ) =
2
571
. This yields the metric tensor field g = gij dxi ⊗ dxj . Hence
g = dx ⊗ dx + dy ⊗ dy + dz ⊗ dz = d ⊗ d +
2
dϕ ⊗ dϕ + dz ⊗ dz.
Mnemonically,
ds2 = dx2 + dy 2 + dz 2 = d
2
+
2
dϕ2 + dz 2 .
This tells us that the length l of a curve = (t), ϕ = ϕ(t), z = z(t), t0 ≤ t ≤ t1 ,
is given by the integral
Z t1 p
Z t1
ds(t)
dt =
l=
˙ (t)2 + (t)2 ϕ(t)
˙ 2 + z(t)
˙ 2 dt.
dt
t0
t0
The inverse matrix of (gij ) reads as
1
0
1 0
g 11 g 12 g 13
1 0 0
B 21 22 23 C B −2 C
0A .
@g g g A = @0
0 0 1
g 31 g 32 g 33
For the volume form, we get
υ = dx ∧ dy ∧ dz = d ∧ dϕ ∧ dz.
The cylindric set U := {(x, y, z) ∈ R3 : x2 + y 2 ≤ R2 , 0 ≤ z ≤ h} of radius R and
height h has the volume
meas(U ) = πR2 h.
Using regular cylindrical coordinates, this is obtained by the limit process
Z
Z R Z ϕ=π−ε Z h
υ = lim
d dϕdz = πR2 h.
lim
ε→+0
ε→+0
Uε
ϕ=−π+ε
=0
z=0
Here, we use the truncated set
Uε := {( , ϕ, z) ∈ R3 :
> 0, −π + ε < ϕ < π − ε, 0 ≤ z ≤ h}
with respect to cylindrical coordinates. Mnemonically,
dxdydz = d · dϕ · dz.
Polar Coordinates
Setting z = 0, cylindrical coordinates pass over to polar coordinates of the Cartesian
(x, y)-plane (see Fig. 9.5(a) on page 568). For example, the metric tensor of the
Cartesian (x, y)-plane is given by
g = dx ⊗ dx + dy ⊗ dy = d ⊗ d +
2
dϕ ⊗ dϕ,
and the volume form reads as
υ = dx ∧ dy =
2
2
2
Mnemonically, ds = dx + dy = d
2
+
d ∧ dϕ.
dϕ , and dxdy = d · dϕ.
2
572
9. Applications of Invariant Theory to the Rotation Group
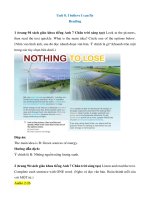
Fig. 9.6. Spherical coordinates
Spherical Coordinates
Spherical coordinates are used for studying physical systems which are symmetric
with respect to rotations about the origin.
Singular spherical coordinates. The basic transformation law reads as
x = r cos ϑ cos ϕ,
y = r cos ϑ sin ϕ,
z = r sin ϑ
where r ≥ 0 and
• −π ≤ ϕ ≤ π (geographic length),
• − π2 ≤ ϑ ≤ π2 (geographic latitude).
Our choice of the parameter values is dictated by geography. For fixed radius r > 0,
we get a sphere (e.g., the surface of earth). Then:
• ϑ = 0 (equator), ϑ = π2 (North Pole), ϑ = − π2 (South Pole).
Moreover, we set x1 := ϕ, , x2 := ϑ, x3 := r In this singular setting, the North Pole
of the earth has the coordinates r = R, ϑ = π2 and −π ≤ ϕ ≤ π. Thus, the map
(x, y, z) → (ϕ, ϑ, r)
(9.11)
is not a diffeomorphism defined on the total space R .
Regular spherical coordinates. Setting
3
O+ = R3 \ {(x, y, z) : x ≤ 0, y = 0, −∞ < z < ∞},
the map (9.11) is a diffeomorphism from the truncated space O+ onto the set
π
π
O := {(ϕ, ϑ, r) ∈ R3 : −π < ϕ < π, − < ϑ < , r > 0}.
2
2
For the Jacobian, we get
˛
˛ ˛
˛
˛x x x ˛ ˛−r cos ϑ sin ϕ −r sin ϑ cos ϕ cos ϑ cos ϕ˛
˛
˛ ϕ ϑ r˛ ˛
∂(x, y, z)
˛
˛ ˛
˛
= ˛ yϕ yϑ yr ˛ = ˛ r cos ϑ cos ϕ −r sin ϑ sin ϕ cos ϑ sin ϕ ˛ = r2 cos ϑ.
˛
˛ ˛
˛
∂(ϕ, ϑ, r)
˛ zϕ zϑ zr ˛ ˛
0
r cos ϑ
sin ϑ ˛
The sign of the Jacobian equals the orientation number ι. Since r > 0, we get
ι=1
for the orientation number of spherical coordinates.
Natural frame. Using
x = xiP + yjP + zkP = r cos ϑ cos ϕ iP + r cos ϑ sin ϕ jP + r sin ϑ kP ,
we get
9.2 Curvilinear Coordinates
573
• b1 = xϕ = −r cos ϑ sin ϕ iP + r cos ϑ cos ϕ jP ,
• b2 = xϑ = −r sin ϑ cos ϕ iP − r sin ϑ sin ϕjP + r cos ϑ kP .
• b3 = xr = cos ϑ cos ϕ iP + cos ϑ sin ϕ jP + sin ϑ kP .
The natural basis vector b1 (P ) at the point is a tangent vector of the latitude circle
through the point P (Fig. 9.6(b)). The natural basis vector b2 (P ) at the point P
is a tangent vector of the meridian through the point P . Finally, the natural basis
vector b3 (P ) at the point P points to the outer radial direction.
Metric tensor. Setting gij := bi bj , we get
1 0
0
1
r2 cos2 ϑ 0 0
g11 g12 g13
C B
B
C
0
r 2 0A .
@g21 g22 g23 A = @
g31 g32 g33
0
0 1
This shows that the natural basis vectors b1 , bj , bj form an orthogonal system.
The metric tensor field g = gij dxi ⊗ dxj reads as
g = dx ⊗ dx + dy ⊗ dy + dz ⊗ dz = r2 cos2 ϑ dϕ ⊗ dϕ + r 2 dϑ ⊗ dϑ + dr ⊗ dr.
Moreover, g = det(gij ) = r4 cos2 ϑ. Mnemonically,
ds2 = r2 cos2 ϑ dϕ2 + r2 dϑ2 + dr2 .
This tells us that the length of a curve ϕ = ϕ(t), ϑ = ϑ(t), r = r(t), t0 ≤ t ≤ t1 , is
given by the integral
Z t1 q
Z t1
ds(t)
˙ 2 + r(t)
r(t)2 cos2 ϑ(t) · ϕ(t)
˙ 2 + r(t)2 ϑ(t)
˙ 2 dt.
dt =
dt
t0
t0
The inverse matrix of (gij ) reads as
0
1
1 0
g 11 g 12 g 13
(r cos ϑ)−2 0 0
B 21 22 23 C B
C
0
r −2 0A .
@g g g A = @
0
0 1
g 31 g 32 g 33
The
For the volume form, we get υ = Eijk dxi ∧ dxj ∧ dxk with
√ volume form.
2
Eijk = g εijk = r cos ϑ εijk . Hence
υ = dx ∧ dy ∧ dz = r2 cos ϑ dϕ ∧ dϑ ∧ dr.
For example, the ball B3R (0) of radius R > 0 centered at the origin has the volume
4πR3
.
3
Using regular spherical coordinates, this is obtained from the following limit process:
Z
Z π−ε
Z π/2
Z R
4πR3
υ = lim
r2 cos2 ϑ dϕdϑdr =
. (9.12)
lim
ε→+0 B3 (0)
ε→+0 ϕ=−π+ε ϑ=−π/2 r=0
3
meas(B3R (0)) =
R,ε
Mnemonically,
dxdydz = r2 cos ϑ dϕdϑdr.
Further reading. A lot of material about special coordinates and their various
applications in geometry and physics can be found in the monumental monograph
by
W. Neutsch, Coordinates: Theory and Applications, Spektrum, Heidelberg, 1350 pages (in German).
574
9. Applications of Invariant Theory to the Rotation Group
9.3 The Index Principle of Mathematical Physics
Replace partial derivatives by covariant partial derivatives, and use only
equations which possess the correct index picture.
Golden rule
9.3.1 The Basic Trick
Let us start with the Poisson equation
−ε0 (Uxx + Uyy + Uzz ) =
on O+
(9.13)
with the positive dielectricity constant ε0 . Here, we fix a right-handed Cartesian
(x, y, z)-coordinate system on the Euclidean manifold E3 . The functions and U
depend on the variables x, y, z. We are given the function : O+ → R. We are
looking for the function U : O+ → R. In Maxwell’s theory of electrostatics, the
electric field E is given by the equation
E = − grad U
where U is called the potential of the electric field E. This way, the equation (9.13)
passes over to the first Maxwell equation
−ε0 div E =
which tells us the crucial physical fact that the electric charge density is the source
for the electric field E.
Our goal is to transform the given equation (9.13) into arbitrary local coordinates. To this end, we proceed as follows.
Step 1: Use a right-handed (resp. left-handed) Cartesian (x, y, z)-system with
the right-handed (resp. left-handed) orthonormal basis b1 , b2 , b3 . Write the given
equation as an O(3)-tensor equation by using the O(3)-tensorial families
δij , δ ij , δji , ι · εijk , ι · εijk , ∂i , bi , bi , dxi
and the orientation number ι of the Cartesian coordinate system. In particular, for
equation (9.13) we get
− ε0 δ ij ∂i ∂j U = .
(9.14)
Note that this equation has the correct index picture. Therefore, the equation is
valid in every right-handed or left-handed Cartesian coordinate system.
Step 2: Choose a local (curvilinear) (x1 , x2 , x3 )-coordinate system. Write the
O(3)-tensor equation as a general tensor equation by using the following replacements:
•
•
•
•
5
δij ⇒ gij , δ ij ⇒ g ij , δji ⇒ δji ,
ι · εijk ⇒ ι · Eijk , ι · εijk ⇒ ι · E ijk ,
bi ⇒ bi (natural basis), dxi ⇒ dxi (natural cobasis),
bi ⇒ bi (lifting of indices).5
This means δ is bs ⇒ g is bs .
9.3 The Index Principle of Mathematical Physics
575
The crucial point is that we replace partial derivatives by covariant partial derivatives, that is,
∂i ⇒ ∇i ,
∂ i ⇒ ∇i
where we set ∂ i := δ is ∂s and ∇i := g is ∇s (lifting of indices). This way, the initial
O(3)-tensor equation passes over to a general tensor equation which is valid in every
local (curvilinear) coordinate system. For example, the equation (9.13) passes over
to
−ε0 g ij ∇i ∇j U = .
(9.15)
This equation is valid in every local coordinate system. In a right-handed or lefthanded Cartesian coordinate system, equation (9.15) coincides with (9.14).
As another example, consider the vector product v×w. In a right-handed (resp.
left-handed) Cartesian coordinate system, we have
v × w = ι · εijk v i w j bk
where v = v i bi and w = w i bi . The replacement described above yields
v × w = ι · Eijk v i w j bk .
This equation is valid in every local coordinate system. Recall that Eijk =
and bk = g ks bs .
√
g εijk ,
9.3.2 Applications to Vector Analysis
Let us consider the temperature field Θ, the velocity vector field v = v i bi , and the
electric field E = E i bi . By page 560, we have the following O(3)-tensor equations
in Cartesian coordinate systems:
•
•
•
•
•
•
•
grad Θ = ∂i Θ bi ,
div v = ∂i v i ,
curl v = ι · εijk ∂i vj bk ,
Dv Θ = (v grad)Θ = v i ∂i Θ,
Dv E = (v i ∂i E j )bj ,
DE = ∂i E j dxi ⊗ bj ,
ΔE = −(δ ij ∂i ∂j E k )bk .
Using the replacements described above, we get the following relations which are
valid in arbitrary local coordinate systems:
•
•
•
•
•
•
•
6
grad Θ = ∂i Θ bi ,6
div v = ∇i v i ,
curl v = ι · E ijk ∇i vj bk ,
Dv Θ = (v grad)Θ = v i ∂i Θ,
Dv E = (v grad)E = v i (∇i E j )bj ,
DE = ∇i E j dxi ⊗ bj ,
ΔE = −g ij ∇i (∇j E k )bk ,
Note that ∇i Θ = ∂i Θ if Θ is a scalar field.
576
9. Applications of Invariant Theory to the Rotation Group
Alternatively, recalling that g = (gij ), we obtain
√
1
div v = ∇i v i = √ ∂i ( g vi ).
g
(9.16)
This follows from (8.168) on page 525. Hence
√
1
ΔU = − √ ∂i ( g ∂ i U ).
g
In fact, both sides of this equation are tensorial invariants, by (8.168), and they
coincide with respect to any Cartesian coordinate system. Thus, they coincide with
respect to any local coordinate system. Consequently, the original Poisson equation
(9.13 ) can be written as
√
ε0
− √ ∂i ( g ∂ i U ) = .
g
(9.17)
The point is that this equation is valid in arbitrary local coordinate systems. On
the other hand, this invariant equation only contains classical partial derivatives.
This underlines the importance of the Weyl derivative in mathematical physics.
In Problem 9.1, we will show how equation (9.17) can be elegantly obtained by
using the Dirichlet variational problem about the minimal electrostatic energy. The
history of the famous Dirichlet problem is discussed in Vol. I, Sect. 10.4.
9.4 The Euclidean Connection and Gauge Theory
The goal of geometers is to describe the geometry of the Euclidean manifold (and of more general manifolds) by formulas which are valid in arbitrary local (curvilinear) coordinate systems. Note that simple geometric
properties can be hidden by using local coordinates which generate clumsy
Christoffel symbols.
Folklore
The geometry of the Euclidean manifold E3 is trivial, since
• there exists a global parallel transport on E3 , and
• the curvature of E3 vanishes identically.
Nevertheless, let us formulate this trivial geometry in terms of Cartan’s language
which can be generalized to the geometry of curved manifolds with respect to a
symmetry group in modern differential geometry (realization of Klein’s 1872 Erlangen program in differential geometry). This section serves as an intuitive motivation
for the general theory which will be considered in Chaps. 13 through 17 (Ariadne’s
thread in gauge theory).
By definition, the Euclidean connection is the Levi-Civita connection with respect
to the metric tensor of the Euclidean manifold E3 . Explicitly, the Christoffel symbols
for the observer O with respect to the local coordinates (x1 , x2 , x3 ) read as follows:
„
«
∂gis
∂gij
∂gjs
k
1 ks
+
−
,
i, j, k = 1, 2, 3.
(9.18)
Γij = 2 g
∂xi
∂xj
∂xs
With respect to the observer O+ (Cartesian (x, y, z)-coordinates), we have gij = δij ,
and hence the Christoffel symbols vanish identically.
9.4 The Euclidean Connection and Gauge Theory
577
9.4.1 Covariant Partial Derivative
According to Sect. 8.8.3 on page 494, the Christoffel symbols induce the covariant
partial derivative. In particular, let v(P ) = vj (P )bj (P ) and w(P ) = wi (P )bi (P )
be velocity vector fields on the Euclidean manifold E3 . Then we have the tensorial
families v i and wi at hand. This yields the tensorial family
j s
∇i v j = ∂i v j + Γis
v ,
Recall that ∂i =
∂
.
∂xi
i, j = 1, 2, 3.
In addition, we get the directional derivative7
Dv w := v i ∇i wj bj .
By the index principle, this definition does not depend on the choice of the observer.
For a special observer O+ using right-handed Cartesian (x, y, z)-coordinates, we get
• ∇i wj = ∂i w j , i, j = 1, 2, 3, and
8
• Dv w = (v grad)w = v i ∂i wj b+
j ;
+
• ∂i bj ≡ 0 for all indices.
9.4.2 Curves of Least Kinectic Energy (Affine Geodesics)
In Euclidean geometry, straight lines can be characterized by both the
principle of least kinetic energy and the principle of minimal length. This
is the paradigm for the fundamental principle of least action in physics. In
terms of mathematics, this includes the theory of geodesics on Riemannian
and pseudo-Riemannian manifolds.
Folklore
The principle of least kinetic energy. Let −∞ < t0 < t1 < ∞. Consider the
motion x = x(t), t ∈ [t0 , t1 ] of a point of mass m > 0 on the Euclidean manifold
E3 . Here, x denotes a position vector located at the origin. Let us consider the
variational principle
Z
t1
t0
1
m
2
˙ 2 dt = min!
x(t)
(9.19)
together with the boundary conditions: x(t0 ) = x0 and x(t1 ) = x1 . That is, the
initial position x(t0 ) of the mass point at time t0 and the terminal position x(t1 )
of the mass point at time t1 are fixed. In terms of physics, we are looking for the
trajectories of the motion with minimal kinetic energy. The solutions of (9.19) are
called energetic geodesics, affine geodesics, or trajectories of minimal kinetic energy.
Intuitively, we expect that the energetic geodesics are straight lines, since no forces
are acting. Let us prove this rigorously.
Theorem 9.10 On the Euclidean manifold E3 , precisely the segments of straight
lines are affine geodesics.
7
8
More precisely, we have to write Dv(P ) w(P ) := v i (P )∇i w j (P ) · bj (P ).
In order to emphasize that Dv w concerns the Euclidean connection, we frequently replace the symbol Dv w by dv w. This convention coincides with the
notation used in finite-dimensional and infinite-dimensional Banach spaces.
578
9. Applications of Invariant Theory to the Rotation Group
˙ := 12 mx˙ 2 . If the trajectory t → x(t) is a
Proof. (I) Necessary condition. Set L(x)
solution of (9.19), then we have the Euler–Lagrange equation
d
˙
= 0,
Lx˙ (x(t))
dt
t0 ≤ t ≤ t 1 .
ă (t) = 0, t0 t t. This implies that t → x(t) is the segment of a straight
Hence x
line.
(I) Sufficient condition. Since the original minimum problem (9.19) is of quadratic type, Jacobi’s accessory minimum problems based on the second variation is also
quadratic. Explicitly, we get
Z t1
1
˙ 2 dt = min!
mh(t)
(9.20)
2
t0
together with the boundary conditions: h(t0 ) = 0 and h(t1 ) = 0. The same argument as in (I) shows that the problem (9.24) has only the trivial solution h ≡ 0.
Consequently, every solution of the Euler–Lagrange equation to (9.19) is a solution
of (9.19) (see Sect. 6.5.3 of Vol. II).
✷
Curvilinear coordinates. Using the local coordinates (x1 , x2 , x3 ), we get
L(x˙ 1 , x˙ 2 , x˙ 3 ) = gij (x1 , x2 , x3 )x˙ i x˙ j . The original minimum problem (9.24) reads as
Z t1
L(x˙ 1 (t), x˙ 2 (t), x˙ 3 (t)) dt = min!
(9.21)
t0
together with the boundary conditions: xi (t0 ) = xi0 and xi (t1 ) = xi1 , i = 1, 2, 3. By
(8.159) on page 520, the solution of (9.19) satisfies the Euler–Lagrange equations
t0 t t1
x
ă(t) + x i (t)Ai (x(t)) x(t)
= 0,
with the so-called connection matrices
1
0
1
1
1
Γi1
Γi2
Γi3
B 2 2 2C
Ai := @Γi1
Γi2 i3 A ,
3
3
3
i1
i2
i3
i = 1, 2, 3.
Explicitly,
x
ăk (t) = x i (t)Γijk (x1 (t), x2 (t), x3 (t)) · x˙ j (t),
k = 1, 2, 3
(9.22)
which are the equations of motion of the mass point with respect to the local
(x1 , x2 , x3 )-coordinates. In terms of physics, the Christoffel symbols describe fictive
friction forces generated by the choice of the observer. In terms of geometry, the
differential equations (9.22) describe affine geodesics which are segments of straight
lines with respect to Cartesian coordinates.
Cylindrical coordinates. The variational problem (9.21) can be used in order
to compute effectively the Christoffel symbols. Let us explain this in the special case
of cylindrical coordinates. Set x1 := , x2 . = ϕ, x3 . = z. Then
L( , ϕ, z) = 12 m( ˙ 2 +
2
ϕ˙ 2 + z˙ 2 ).
d
L˙ = L ,
The Euler–Lagrange equations read as dt
Explicitly, we get the differential equations
d
L
dt ϕ˙
= Lϕ , and
d
L
dt z˙
= Lz .
9.4 The Euclidean Connection and Gauge Theory
ă=
à 2 ,
ă=
2
à ,
579
ză = 0
for the ane geodesics t ( (t), ϕ(t), z(t)). This yields
1
=− ,
Γ22
1
2
2
Γ12
= Γ21
=
.
All the other Christoffel symbols vanish identically. Setting
0
1
1
1
1
Γi1
Γi2
Γi3
B 2 2 2C
i = 1, 2, 3,
Ai = @Γi1
Γi2 Γi3 A ,
3
3
3
Γi1
Γi2
Γi3
we obtain the so-called connection matrices
1
1
0
0
0 0 0
0 − 0
C
C
B
B
A1 = @0 1 0A , A2 = @ 1 0 0A ,
0 0 0
0 0 0
For the local connection form A, we get
0
0 − dϕ
B
A = Ai dxi = @ dϕ d
0
0
Hence
A3 = 0.
1
0
C
0A .
0
Fij = ∂i Ai − ∂j Aj + Ai Aj − Aj Ai = 0,
1
F dxi
2 ij
This yields the trivial curvature form F =
spherical coordinates, we refer to Problem 9.2.
(9.23)
i, j = 1, 2.
∧ dx = 0, as expected. For
j
9.4.3 Curves of Minimal Length
Parallel to the principle of least kinetic energy (9.19), let us study the variational
problem
Z
t1
˙
|x(t)|
dt = min!
(9.24)
t0
together with the boundary conditions: x(t0 ) = x0 and x(t1 ) = x1 . That is, the
initial position x(t0 ) and the terminal position x(t1 ) of the curve x = x(t) with the
parameter t ∈ [t0 , t1 ] are fixed. The solutions of (9.24) are called curves of minimal
length.
Theorem 9.11 On the Euclidean manifold E3 , precisely the segments of straight
lines are curves of minimal length.
Proof. Choose a Cartesian (x, y, z)-coordinate system. Note that
p
˙
|x(t)|
= x(t)
˙ 2 + y(t)
˙ 2 + z(t)
˙ 2.
580
9. Applications of Invariant Theory to the Rotation Group
Suppose that the map t → (x(t), y(t), z(t)) is a solution of (9.24). Then the Euler–
Lagrange equation reads as
„
«
1 dx(t)
d
= 0.
dt |x(t)| dt
˙
Introducing the arc length s as the curve parameter, it follows from ds(t)
= |x(t)|
dt
that
2
d x(s)
= 0.
ds2
Consequently, if there exists a solution of (9.24), then it is the segment of a straight
line, and the minimal value of the integral from (9.24) is the distance between the
endpoints of the given position vectors x0 and x1 at the origin. Since the segment
under consideration realizes this distance, it is indeed a solution of (9.24).
✷
Further reading. We recommend:
J. Jost, Riemannian Geometry and Geometric Analysis, Springer, Berlin,
2008.
W. Klingenberg, Lectures on Closed Geodesics, Springer, Berlin, 1978.
W. Klingenberg, Riemannian Geometry, de Gruyter, Berlin, 1982.
9.4.4 The Gauss Equations of Moving Frames
The integrability conditions for the Gauss equations of moving frames on
the Euclidean manifold E3 yield the vanishing of the Riemann–Christoffel
curvature tensor (flatness of the Euclidean connection).
Folklore
Consider a fixed local (x1 , x2 , x3 )-coordinate system. Let (x1 , x2 , x3 ) denote the
coordinates of the point P .
Theorem 9.12 The natural basis vectors b1 , b2 , b3 satisfy the Gauss equations of
moving frames:
∂i bj (P ) = Γijl (P ) bl (P ),
i, j, = 1, 2, 3.
(9.25)
This tells us that the Christoffel symbols describe the infinitesimal change of
the natural basis vectors.
∂x
∂2 x
∂2 x
Proof. Recall that bj = ∂x
j . Since ∂xi ∂xj = ∂xj ∂xi , we get
gjr = bj br = br bj = grj .
This proves the symmetry of the metric tensorial family gij . Since the three vectors
b1 (P ), b2 (P ), and b3 (P ) form a basis at the point P , there exist real numbers
k
Bij
(P ) such that
k
(P ) bk (P ),
∂i bj (P ) = Bij
i, j = 1, 2, 3.
k
From bk br = gkr , we get ∂i bj · br = Bij
gkr . Multiplication with g kr yields
k
k
m
m
= δm
Bij
= g kr grm Bij
= g kr ∂i bj · br .
Bij
Differentiation of br bj = grj gives
9.4 The Euclidean Connection and Gauge Theory
581
∂i br · bj + br ∂i bj = ∂i grj .
Interchanging the indices and summing the terms yields
∂i bj · br = 12 (∂i grj + ∂j gir − ∂r gij ).
k
This implies Bij
= Γijk .
✷
l
)
The language of classic tensor analysis. Using the matrices Ai := (Γik
l
) (the upper index l is the row index, and the lower index k is the
and Fij := (Rijk
column index), we get
Fij = ∂i Aj − ∂j Ai + Ai Aj − Aj Ai ,
i, j = 1, 2, 3.
(9.26)
Explicitly, we get both the components of the Riemann–Christoffel tensorial family,
l
l
l
l
s
l
s
= ∂i Γjk
− ∂j Γik
+ Γis
Γjk
− Γjs
Γik
Rijk
(9.27)
k
.
and the components of the torsion tensor tensorial family, Tijk := Γijk − Γji
Proposition 9.13 For all indices, we have
l
≡ 0 (vanishing curvature of E3 ), and
(i) Rijk
k
(ii) Tij ≡ 0 (vanishing torsion of E3 ).
Proof. If we use Cartesian coordinates on E3 , then the Christoffel symbols Γijk
k
vanish identically. Hence Tijk ≡ 0 and Rijl
≡ 0. In an arbitrary local coordinate
3
system on E , the Christoffel symbols do not vanish identically, as a rule. But,
k
Rijl
and Tijk are tensorial families (see Sect. 8.9.1 on page 504). Finally, recall the
following: If a tensorial family vanishes identically in a special local coordinate
system, then it vanishes identically in all local coordinate systems.
✷
From the analytic point of view we want to show that:
The integrability conditions for the Gauss equations (9.25) of moving
k
≡ 0.
frames yield Rijl
In mathematics, integrability conditions are always obtained form the commutativity relation ∂i ∂j = ∂j ∂i for partial derivatives. In particular, it follows from the
l
bl of moving frames that
Gauss equation ∂j bk = Γjk
l
l
l
l
r
bl + Γjk
∂i bl = (∂i Γjk
+ Γir
Γjk
)bl .
∂i ∂j bk = ∂i Γjk
l
l
Using ∂i ∂j bk ≡ ∂j ∂i bk , we obtain Rijk
bl ≡ 0. Hence Rijk
≡ 0.
9.4.5 Parallel Transport of a Velocity Vector and Cartan’s
Propagator Equation
We are given the smooth curve
C : P = P (t),
t ∈ R.
We assign to every point P of the curve C a velocity vector v(P ). We say that
the family {v(P )}P ∈C is parallel along the curve C iff it is parallel in the usual
sense. We set v(t) := v(P (t)), and we assume that t → v(t) is a smooth map from
the open interval R to E3 . Consider a local (x1 , x2 , x3 )-coordinate system which
describes the curve in the form