aChiết rót và đóng nắp chai bkhóa luận tốt nghiệp khoa công nghệ điện chuỳnh văn quy lê hoàng nhật khôi trần tiến đạt
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (4.62 MB, 163 trang )
ĐẠI HỌC CƠNG NGHIỆP TP.HCM
KHOA CƠNG NGHỆ ĐIỆN
KHĨA LUẬN TỐT NGHIỆP
ĐỀ TÀI: CHIẾT RÓT VÀ ĐÓNG NẮP
CHAI
SINH VIÊN THỰC HIỆN:
LỚP:
HUỲNH VĂN QUY
15093291
LÊ HỒNG NHẬT KHƠI
15096661
TRẦN TIẾN ĐẠT
15049901
DHDKTD11C
GVHD: THS. VÕ TRUNG THƯ
TP. HƠ CHÍ MINH, NĂM 2019
KHĨA LUẬN TỐT NGHIỆP
KHOA CƠNG NGHÊ ĐIỆN
1. Họ và tên sinh viên/ nhóm sinh viên được giao đề tài
PHIẾU GIAO ĐỀ TÀI ĐỒ
ÁN TỐT NGHIỆP
(1) : Huỳnh Văn Quy
(2) : Lê Hồng Nhật Khơi
(3) : Trần Tiến Đạt
15093291
15096661
15049901
2. Tên đề tài
CHIẾT RÓT VÀ ĐÓNG NẮP CHAI
3. Nội dung
-
-
Thiết kế, lắp ráp mơ hình trên đế ván gỗ 600X1200mm: Sử dụng thiết bị điều
khiển lập trình PLC S7-1200, màn hình HMI, các thiết bị điện, khí nén, vật liệu
nhơm định hình và các vật liệu khác phù hợp để xây dựng mơ hình gồm các bộ
phận chính sau: Băng tải vận chuyển chai (2 bộ), Bộ phận chiết rót (giả định),
Bộ phận gắp chai, Bộ cấp nắp, Bộ đóng nắp, Bộ phát hiện chai lỗi (không nắp),
Bộ phận đẩy chai vào kho chứa, Kho chứa (hình thức băng tải con lăn).
Thiết kế giao diện điều khiển, giám sát HMI
Lập trình điều khiển theo một số yêu cầu công nghệ cho Mô hình.
4. Kết quả
Sau khi thực hiện xong đồ án, nhóm chúng em đã có thêm những kiến thức bổ ích về
PLC S7-1200 và phần mềm WinCC, điều khiển mơ hình bằng HMI, cũng như có thể
vận dụng được những kiến thức đã học để hoàn thành đồ án. Hệ thống khi vận hành đã
hoạt động đúng với mục tiêu đặt ra.
Giảng viên hướng dẫn
Tp. HCM, ngày
tháng năm 2019
Sinh viên
NHẬN XÉT CỦA GIẢNG VIÊN HƯỚNG DẪN
2
MỤC LỤC
DANH SÁCH CÁC HÌNH ẢNH
DANH SÁCH BẢNG BIỂU
LỜI MỞ ĐÀU
Hiện nay q trình tự động hóa trong công nghiệp là hết sức quan trọng đối với
sự phát triển của một quốc gia. Với các nước phát triển như Mỹ, Nhật, .... thì tự động
hóa khơng cịn xa lạ và đã trở nên quen thuộc. Ở các nước này máy móc hầu như đã
thay thế lao động chân tay, số lượng công nhân trong nhà máy đã giảm hẳn và thay vào
đó là những lao động chun mơn, những kỹ sư có tay nghề, điều khiển giám sát trực
tiếp q trình sản xuất thơng qua máy tính. Việc điều khiển qua màn hình HMI là vơ
cùng cần thiết, giúp người vận hành có cái nhìn trực quan, tổng qt q trình hoạt
động của tồn bộ dây chuyền sản xuất.
Là sinh viên theo chuyên ngành “Điều khiển và tự động hóa” cùng những nhu
cầu, ứng dụng thực tế cấp thiết của nền công nghiệp nước nhà, em muốn được nghiên
cứu và tìm hiểu những thành tựu khoa học mới để có nhiều cơ hội biết thêm về kiến
thức thực tế, củng cố kiến thức đã học, phục vụ tốt cho sự nghiệp cơng nghiệp hóa hiện
đại hóa. Vì những lý do trên em đã chọn đề tài: “Chiết rót và đóng nắp chai sử dụng
Simatic S7 - 1200”.
Khóa luận nhằm nắm vững kiến thức về lập trình với S7 - 1200, hiểu rõ được
quá trình hoạt động của một hệ thống thực tế. Nghiên cứu đề tài nhằm tích lũy kinh
nghiệm, học hỏi thêm kiến thức và phát huy tính sáng tạo, giải quyết vấn đề. Theo
phương châm học đi đơi với hành thì việc tạo ra một hệ thống mô phỏng dùng S7 1200 là một yêu cầu cần thiết, đáp ứng được nhu cầu đặt ra.
Đề tài sử dụng S7 - 1200 trong tự động hóa thì rất lớn, hầu hết các nhà máy, xí
nghiệp ứng dụng HMI touch trong việc điều khiển, giám sát tất cả các khâu. Nhưng
trong đề tài này chỉ là mô phỏng quá trình hoạt động của một hệ thống nhỏ, chưa thể
hồn tồn theo sát với thực tế. Vì vậy vẫn còn nhiều vấn đề cần được quan tâm giải
quyết trong tương lai.
KHĨA LUẬN TỐT NGHIỆP
KHOA CƠNG NGHÊ ĐIỆN
CHƯƠNG 1: GIỚI THIỆU TỔNG QUAN THIẾT BỊ
1.1 Giới thiệu về PLC S7-1200
PLC viết tắt của Programmable Logic Controller là thiết bị điều khiển lập trình
được cho phép thực hiện linh hoạt các thực tốn điều khiển logic thơng qua một ngơn ngữ
lập trình, người sử dụng có thể lập trình để thực hiện một loạt trình tự các sự kiện. Các sự
kiện này được kích hoạt bởi tác nhân kích thích tác động vào PLC hoặc qua các hoạt
động có trễ như thời gian định kì hay thời gian được đếm. Một khi sự kiện được kích hoạt
thật sự, nó bật ON hay OFF các thiết bị điều khiển bên ngoài được gọi là thiết bị vật lý.
Một bộ điều khiển lập trình sẽ liên tục lặp trong chương trình do người sử dụng lập ra chờ
tín hiệu ở ngõ vào và xuất tín hiệu ở ngõ ra tại các thời điểm đã lập trình.
Để khắc phục những nhược điểm của bộ điều khiển dùng dây nối, người ta đã chế
tạo bộ điều khiển PLC nhằm thỏa mãn các yêu cầu sau:
-
Lập trình dễ dàng, ngơn ngữ lập trình dễ học
-
Gọn nhẹ, dễ bảo quản, sửa chữa
-
Dung lượng bộ nhớ lớn để có thể chứa được những chương trình phức tạp
-
Hồn tồn tin cậy trong môi trường công nghiệp
-
Giao tiếp được với các thiết bị thơng minh khác như máy tính, nối mạng, các
module mở rộng
Các thiết kế đầu tiên là nhằm thay cho các phần cứng Relay dây nối và các logic
thời gian. Tuy nhiên bên cạnh đó việc địi hỏi tăng cường dung lượng nhớ và tính dễ dàng
cho PLC mà vẫn đảm bảo tốc độ xử lí cũng như giá cả...
Chính điều này đã tạo ra sự quan tâm sâu sắc đến việc sử dụng PLC trong công
nghiệp, các tập lệnh nhanh chóng đi từ lệnh logic đơn giản đến các lệnh đếm, định thời,
thanh ghi dịch.. .Sự phát triển các máy tính dẫn đến các bộ PLC có dung lượng lớn, số
lượng I/O nhiều hơn.
Trong PLC phần cứng CPU và chương trình là đơn vị cơ bản cho quá trình điều
khiển và xử lí hệ thống, chức năng mà bộ điều khiển cần thực hiện sẽ được xác định bằng
6
KHĨA LUẬN TỐT NGHIỆP
KHOA CƠNG NGHÊ ĐIỆN
một chương trình. Chương trình này sẽ được nạp sẵn vào bộ nhớ của PLC, PLC sẽ thực
hiện việc điều khiển dựa vào chương trình này. Như vậy nếu muốn thay đổi hay
mở rộng chức năng của quy trình cơng nghệ. Ta chỉ cần thay đổi chương trình bên trong
bộ nhớ PLC. Việc thay đổi hay mở rộng chức năng sẽ được thực hiện một các dễ dàng mà
không cần một sự can thiệp vật lý vào so với các bộ dây nối hay Relay.
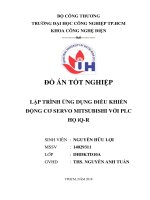
Hình 1.1: So sánh giữa PLC S7 - 1200 và S7 - 200 về các module mở rộng
S7-1200 ra đời năm 2009 dùng để thay thế dần cho S7-200. Simatic S7 - 1200
được thiết kế nhỏ gọn, chi phí thấp, và một tập lệnh mạnh giúp những những giải pháp
hoàn hảo hơn cho ứng dụng sử dụng với S7 - 1200. Đồng thời S7- 1200 còn cung cấp một
cổng PROFINET, hỗ trợ chuẩn Ethernet và TCP/IP.
Các thành phần của PLC S7-1200 bao gồm:
-
3 bộ điều khiển nhỏ gọn với sự phân loại trong các phiên bản khác nhau giống như
điều khiển AC hoặc DC phạm vi rộng.
-
2 mạch tương tự và số mở rộng điều khiển module trực tiếp trên CPU làm giảm
chi phí sản phẩm.
-
13 module tín hiệu số và tương tự khác nhau.
-
2 module giao tiếp RS232/RS485 để giao tiếp thông qua kết nối PTP.
-
Bổ sung 4 cổng Ethernet.
-
Module nguồn PS 1207 ổn định, dòng điện áp 115/230 VAC và điện áp 24VDC.
7
KHĨA LUẬN TỐT NGHIỆP
KHOA CƠNG NGHÊ ĐIỆN
1.2 Module CPU
Module CPU là loại module có chứa bộ vi xử lý, hệ điều hành, bộ nhớ, các bộ thời
gian, bộ đếm, cổng truyền thông và một vài cổng vào ra số. Các cổng vào ra số có trên
module CPU được gọi là cổng vào ra Onboard.
PLC S7 - 1200 có nhiều loại module khác nhau có hình dạng, chức năng, tốc độ xử
lí lệnh, bộ nhớ chương trình cũng khác nhau. S7 - 1200 có 3 dịng là CPU 1211C, CPU
1212C và CPU 1214C. S7 - 1200 được trang bị thêm tính năng bảo mật giúp bảo vệ
quyền truy cập vào cả CPU và chương trình điều khiển.
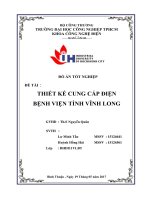
® Power connector
® Removable user wiring connectors (behind the doors)
® Status LEDs for the on-board I/O
® PROFINET connector (on the bottom of the CPU)
Hình 1.2: Các khối chức năng CPUS7-1200
Các đặc tính của CPU S7 - 1200 được thể hiện trong bảng sau:
8
KHĨA LUẬN TỐT NGHIỆP
KHOA CƠNG NGHÊ ĐIỆN
Feature
CPU 1211C
CPU 1212C
CPU 1214C
Physical size (mm)
90 x 100x75
90 X 100x75
110 x 100x75
User memory
•
Work memory
•
Load memory
•
Retentive memory
Local on-board I/O
•
Digital
•
•
•
•
Analog
Process image size
•
Inputs
•
Outputs
25 Kbytes
1 Mbyte
2 Kbytes
•
•
•
25 Kbytes
1 Mbyte
2 Kbytes
•
•
•
50 Kbytes
2 Mbytes
2 Kbytes
•
6 inputs
4 outputs
•
2 inputs
•
8 inputs
6 outputs
•
2 inputs
•
14 inputs
10 outputs
•
2 inputs
•
•
•
•
•
•
1024 bytes
1024 bytes
1024 bytes
1024 bytes
1024 bytes
1024 bytes
Bit memory (M)
4096 bytes
4096 bytes
8192 bytes
Signal modules expansion
None
2
8
Signal board
1
1
1
Communication modules
3
3
3
4
• 3 at 100 kHz
1 at 30 kHz
. 3 at 80 kHz
1 at 20 kHz
3
6
High-speed counters
•
Single phase
•
Quadrature phase
•
3 at 100
kHz
•
3 at 80
kHz
•
3 at 100 kHz
3 at 30 kHz
•
3 at 80 kHz
3 at 20 kHz
Pulse outputs1
2
2
2
Memory card (optional)
Yes
Yes
Yes
Real time clock retention time
10 days, typical / 6 day minimum at 40 degrees c
Real math execution speed
18 ps/instruction
Boolean execution speed
0.1 ps/instruction
Bảng 1.1: Các đặc tính của CPU S7-1200
1.3 Module mở rộng
PLC S7 - 1200 có thể mở rộng các module tín hiệu và các module gắn ngoài để
mở rộng chức năng của CPU. Ngoài ra có thể cài đặt thêm các module truyền thơng để
hổ trợ giao thức truyền thông khác.
Khả năng mở rộng của từng loại CPU tùy thuộc vào các đặc tính, thơng số và quy
định của nhà sản xuất.
S7 - 1200 có các loại module mở rộng sau:
-
Communication module (CM)
-
Signal board (SB)
-
Signal module (SM)
9
KHĨA LUẬN TỐT NGHIỆP
KHOA CƠNG NGHÊ ĐIỆN
Hình 1.3: Các đặc tính của CPU S7-1200
Các đặc tính của module mở rộng như sau:
Module
Signal module
(SM)
Digital
Input only
Output only
Combination in/out
8 X DC In
8 X DC Out
8 X Relay Out
8 X DC ln/8 X DC Out
8 X DC ln/8 X Relay Out
16 X DC Out
16 X Relay Out
16xDC ln/16 X DC Out 16xDC
ln/16 X Relay Out
4 X Analog ln/2 X Analog Out
16xDC In
Analog
Digital
Signal board
(SB)
Analog
Communication module (CM)
• RS485
. RS232
4 X Analog
In
8 X Analog
-
2 X Analog Out
4 X Analog Out
-
2 X DC ln/2 X DC Out
1 X Analog Out
-
Bảng 1.2: Các đặc tính của module mở rộng S7-1200
1.4 Giao tiếp của S7-1200
Simatic S7 - 1200 hỗ trợ kết nối Profibus và kết nối với PTP (point to point)
Giao tiếp PROFINET với:
-
Các thiết bị lập trình
-
Thiết bị HMI
-
Các bộ điều khiển SIMATIC khác
-
Hỗ trợ các giao thức kết nối:
-
TCP/IP
-
SIO - on- TCP
10
KHĨA LUẬN TỐT NGHIỆP
KHOA CƠNG NGHÊ ĐIỆN
Hình 1.4: Các kết nối của S7-1200
1.5 Tín hiệu analog
1.5.1
•
Tín hiệu analog input
Ngun lý: Trong q trình sản xuất có nhiều các đại lượng vật lý (áp suất, tốc độ,
tốc độ quay, nồng độ pH, độ nhớt, mực nước trong bồn...) Cần được PLC xử lý
cho mục đích điều khiển tự động.
•
Cảm biến: Các cảm biến đo lường cảm nhận những thay đổi vật lý có thể đo như
sự thay đổi tuyến tính, góc quay, độ dẫn điện thay đổi.
•
Bộ chuyển đổi: Các bộ chuyển đổi đo lường chuyển đổi các giá trị đề cập ở trên
sang những tín hiệu analog chuẩn, chẳng hạn 500mV, 0-10V, 20mA, 4...20mA.
•
ADC (Analog Digital Convert): Trước khi những giá trị analog được CPU xử lý,
chúng phải chuyển sang dạng số. Điều này được thực hiện bằng bộ chuyển đổi
ADC ở các module analog ngõ vào. Việc chuyển đổi tín hiệu tín hiệu analog sang
tín hiệu digital được thực hiện tuần tự, nghĩa là tín hiệu được chuyển đổi lần lượt
cho từng kênh analog input.
•
Kết quả bộ nhớ: Kết quả chuyển đổi được lưu trữ trong bộ nhớ, chúng chỉ mất đi
khi CS0 giá trị mới viết đè lên. Tín hiệu analog qua chuyển đổi có thể được đọc
bằng lệnh “L PIW.”
•
Ngõ vào Analog: Lệnh truyền “T PQW...” được dùng để truyền các giá trị analog
của chương trình tới một module ngõ ra, một bộ DAC chuyển chúng sang các tín
hiệu analog chuẩn.
•
Cơ cấu chấp hành analog: Các tín hiệu ngõ vào analog chuẩn có thể nối trực tiếp
các module ngõ ra analog. Trong S7-1200 các PLC thường tích hợp sẵn hai kênh
11
KHĨA LUẬN TỐT NGHIỆP
KHOA CƠNG NGHÊ ĐIỆN
analog input. Hoặc ta có thể dùng module gắn trên CPU (thường gọi là signal
boards) hoặc module rời gắn bên hông CPU để đọc tín hiệu analog. Các module
này đọc được tín hiệu dịng từ 4 đến 20mA hoặc tín hiệu áp từ 0 đến 10V, được
PLC hiểu với giá trị tương ứng từ 0 đến 27846.
1.5.2
Tín hiệu analog output
Trong S7-1200 để xuất được analog output, ta phải sử dụng module analog output.
Các module này có thể gắn liền trên PLC hoặc gắn rời bên hông CPU. Giá trị xuất ra
module này từ 0 đến 27648 tương ứng với giá trị xuất ra dòng điện 4 đến 20mA hoặc xuất
tín hiệu điện áp từ 0 đến 10V.
1.6 Xử lý tín hiệu analog
Trên thân CPU S7-1200 đã có sẵn 2 đầu vào ra analog, nhưng ở đây tín hiệu là
dạng voltage. Với các tín hiệu analog, có thể là 2, 3 hoặc 4 dây, ta đấu nối như sơ đồ dưới
đây:
Hình 1.5: Sơ đồ đấu nối tín hiệu analog
Phần mềm TIA Portal cung cấp 2 khối hàm dễ dàng xử lý đó là NORMAL và
SCALE. Với 2 khối hàm này ta hồn tồn có thể xử lý được tín hiệu analog.
12
KHĨA LUẬN TỐT NGHIỆP
KHOA CƠNG NGHÊ ĐIỆN
1.7 Màn hình HMI Weintek
Hình 1.6: Màn hình HMI
•
Phần cứng:
-
Màn hình: có chức năng cảm ứng để người vận hành có thể chạm tay vào để điều
khiển các thao tác trên đó như 1 điện thoại Smartphone hiện đại mà chúng ta hay
dùng hang ngày. Ngồi ra màn hình cịn dùng để hiển thị các trạng thái cũng như
các tín hiệu hoạt động của máy và thiết bị tùy thuộc vào nhu cầu người dùng và do
người lập trình code lên.
-
Các phím bấm
-
Chips: CPU
-
Bộ nhớ chương trình: ROM, RAM, EPROM/Flash...
•
Phần mềm:
-
Các hàm và lệnh
-
Phần mềm phát triển
-
Các công cụ xây dựng HMI
-
Các công cụ kết nối, nạp chương trình và gỡ rối
-
Các cơng cụ mô phỏng
1.8 Cảm biến quang
1.8.1
Giới thiệu về cảm biến
Cảm biến là thiết bị điện tử cảm nhận những trạng thái hay q trình vật lý hay hóa
13
KHĨA LUẬN TỐT NGHIỆP
KHOA CƠNG NGHÊ ĐIỆN
học ở mơi trường cần khảo sát và biến đổi thành tín hiệu điện để thu thập thơng tin về
trạng thái hay q trình đó.
Thơng tin được xử lý để rút ra tham số định tính hoặc định lượng của mơi trường,
phục vụ các nhu cầu nghiên cứu khoa học kỹ thuật như đo đạc, phục vụ trong truyền và
xử lý thông tin...
Cảm biến thường được đặt trong các vỏ bảo vệ tạo thành đầu thu hay đầu dị (Test
probe), có thể kèm theo các mạch điện hỗ trợ.
Hình 1.7: Cảm biến quang
1.8.2
Ưu điểm của cảm biến quang
Cảm biến quang có nhiều ưu điểm hơn so với các loại cảm biến khác như:
-
Không cần tiếp xúc với vật thể cần phát hiện
-
Có thể phát hiện với vật từ khoảng cách xa
-
Khơng bị hao mịn và có tuổi thọ cao
-
Thời gian đáp ứng nhanh khoảng 1ms
-
Ngồi ra cảm biến quang có thể phát hiện nhiều dạng vật thể/vật chất khác nhau:
từ việc phát hiện một chai nhựa trên băng chuyền hoặc kiểm tra xem tay robot đã
gắp linh kiện hay chưa.
1.8.3
Cấu trúc thiết kế
Cấu trúc thiết kế của cảm biến quang khá đơn giản, bao gồm 3 bộ phận chính:
- Bộ phát sáng
- Bộ thu sáng
- Mạch xử lý tín hiệu ra
14
KHĨA LUẬN TỐT NGHIỆP
KHOA CƠNG NGHÊ ĐIỆN
Photo-transistor
Hình 1.8: Cấu trúc của cảm biến quang
1.8.4
Cấu trúc trong
• Bộ phát sáng
Ánh sáng được phát theo xung. Nhịp điệu xung đặc biệt giúp cảm biến phân
biệt được ánh sáng của cảm biến và ánh sáng từ các nguồn khác (như ánh sáng mặt
trời hoặc ánh sáng trong phịng)
•
Bộ thu sáng
Thơng thường bộ thu sáng là một phototransistor (tranzito quang). Bộ phận này
cảm nhận ánh sáng và chuyển đổi thành tín hiệu điện tỉ lệ. Bộ phận thu có thể nhận ánh
sáng trực tiếp từ bộ phát hoặc ánh sáng phản xạ lại từ vật bị phát hiện.
•
Mạch tín hiệu ra
Mạch đầu ra chuyển tín hiệu tỉ lệ (analogue) từ tranzito quang thành tín hiệu on/off
được khuếch đại. Khi lượng ánh sáng thu được vượt quá ngưỡng được xác định, tín hiệu
ra của cảm biến được kích hoạt.
Mặc dù một số loại cảm biến thế hệ trước tích hợp mạch nguồn và dùng tín hiệu ra
là tiếp điểm rơ le vẫn khác phổ biến, ngày nay các loại cảm biẻn chủ yếu dùng tín hiệu ra
bán dẫn (PNP/NPN)
1.9 Pitong xilanh
1.9.1
Tổng quan về xilanh khí nén
Xilanh khí nén là dạng cơ cấu vận hành có chức năng biến đổi năng lượng tích lũy
trong khí nén thành động năng cung cấp cho các chuyển động. Xilanh khí nén là các thiết
15
KHĨA LUẬN TỐT NGHIỆP
KHOA CƠNG NGHÊ ĐIỆN
bị cơ học tạo ra lực, thường kết hợp với chuyển động và được cung cấp bởi khí nén (lấy
từ máy nén khí thơng thường).
Để thực hiện chức năng của mình, xilanh khí nén truyền một lực bằng cách chuyển
năng lượng tiềm năng của khí nén vào động năng. Điều này đạt được bởi khí nén có khả
năng nở rộng, khơng có đầu vào năng lượng bên ngồi, mà chính nó xảy áp lực được thiết
lập bởi khí nén đang ở áp suất lớn hơn áp suất khí quyển. Sự giãn nở khơng khí này làm
cho pitong di chuyển theo hướng mong muốn. Một khi được kích hoạt, khơng khí nén
vào trong ống ở một đầu của pitong và truyền tải lực trên pitong. Do đó, pitong sẽ di
chuyển bằng khí nén.
Xilanh khí nén cũng có nhiều loại thiết kế khác nhau cho phù hợp với yêu cầu chế
tạo máy. Đồng thời, tùy thuộc vào thiết kế của hệ thống mà xilanh khí nén có thể hoạt
động theo nhiều cách.
1.9.2
Các loại xilanh khí nén
• Xilanh khí nén hoạt động đơn:
Các loại xilanh hoạt động đơn sử dụng lực truyền khơng khí để di chuyển theo một
hướng (thường là ra ngồi) và một lị xo để trở về vị trí “ban đầu”. Đối với kiểu xilanh
này khí nén được sử dụng dùng để sinh cơng từ một phần của pitong, sau đó pitong lùi về
bằng một lực đẩy của lò xo hay từ lực bên ngồi tác động về. Thơng thường đói với
xilanh khí nén tác động đơn chúng ta thường thấy trên xilanh có 1 lỗ cấp nguồn khí nén
và lỗ thốt khí nén. Để đều chỉnh dịng khí nén cho xilanh đơn thì thường chúng ta sử
dụng van điện từ khí nén 3/2.
16
KHĨA LUẬN TỐT NGHIỆP
KHOA CƠNG NGHÊ ĐIỆN
Hình 1.9: Xi lanh khí nén đơn
• Xilanh khí nén hoạt động kép (xilanh hai chiều)
Là loại xilanh hoạt động sử dụng lực không khí để di chuyển đẩy ra và rút lại.
Chúng có hai cổng để cho phép khơng khí, một cho hành trình đi ra và một cho hành trình
lùi về. Xilanh khí nén hai chiều được dùng để sinh ra lực đẩy pitong từ 2 phía, đối với
loại xilanh này có 2 lỗ dùng để cung cấp nguồn khí nén, lưu lượng khí nén cấp cho van
được sử dụng các kiểu van điện từ chia khí 4/2, 5/2.
Hình 1.10: Xilanh khí nén kép
• Xilanh khí nén trượt
Hình 1.11: Xilanh khí nén trượt
• Xilanh khí nén xoay
Hình 1.12: Xilanh khí nén xoay
17
KHĨA LUẬN TỐT NGHIỆP
1.10
Loadcell
1.10.1
Giới thiệu về loadcell
KHOA CƠNG NGHÊ ĐIỆN
Loadcell là thiết bị cảm biến dùng để chuyển đổi lực hoặc trọng lượng thành tín
hiệu điện. Cấu trúc có thể biến dạng đàn hồi khi chịu tác động của lực tạo ra một tín hiệu
điện tỉ lệ với sự biến dạng này gọi là “strain gage”.
Mỗi loadcell (cảm biến tải) một đầu ra độc lập, thường 1 từ 1 đến 3mV/V. Đầu ra
được tổng hợp dựa trên kết quả của đầu ra từng cảm biến tải - loadcell. Các thiết bị đo
lường hoặc bộ hiển thị khuếch đại tín hiệu điện đưa về, qua chuyển đổi ADC, vi xử lý với
phần mềm tích hợp sẵn thực hiện tính tốn và đưa kết quả đọc lên màn hình. Đa phần các
thiết bị hay bộ hiển thị hiện đại đều cho phép giao tiếp với các thiết bị ngồi khác như
máy tính hoặc máy in. Những loadcell này dựa trên nguyên lý cầu điện trở cân bằng gọi
là cảm biến tải cầu điện trở.
Hình 1.13: Loadcell
Giá trị lực tác dụng tỉ lệ với sự thay đổi điện trở cảm ứng trong cầu điện trở, do đó
trả về tín hiệu điện áp tỉ lệ. Ưu điểm chính của cơng nghệ này là xuất phát từ yêu cầu thực
tế, với những tham số xác định trước, sẽ có các sản phẩm thiết kế phù hợp cho từng ứng
dụng của người dùng. Ở đó các phần tử cảm ứng có kích thước và hình dạng khác nhau
phù hợp với yêu cầu của người dùng. Các dạng phổ biến: cảm biến tải dạng kéo, dạng
uốn và cảm biến tải dạng nén...
1.10.2
Các loại module loadcell
Có 2 loại module loadcell:
-
Module loadcell chịu nén được thiết kế để sử dụng cho bồn/ phễu chứa hoặc cấu
trúc có thể đặt lên đỉnh của bộ module loadcell. Tải trọng có xu hướng nén các
18
KHĨA LUẬN TỐT NGHIỆP
KHOA CƠNG NGHÊ ĐIỆN
loadcell.
-
Module loadcell chịu kéo được thiết kế cho các phễu chứa hoặc cấu trúc có thể
treo lên các module loadcell. Tải trọng có xu hướng kéo dãn các loadcell.
Hình 1.14: Loadcell chịu nén và Loadcell chịu kéo
Thông số thiết kế
Không gian, mặt bằng
Module loadcell chịu nén
Module loadcell chịu kéo
ĐỊI hịi phải đù khơng gian, mật bằng để đật
Khơng địỉ khỏi mật bấng cho phễu chứa và
bịn chửa và module loadcell. Có thể u cầu
module loadcell và có thé cho phép di chuyển
khơng gian đêm xung quanh cho các co cấu
bẽn dưới phễu chữa.
giâm dao dộng.
Két cáu khung/ sàn
Sàn hoảc mặt bằng, bé móng, nèn nhà, khung
dỡ cằn được gia có đẻ phù hạp với trọng lượng
Trằn hồc khung treo cần đưọc gia có để phù
hợp với trọng lượng cân cùa phéu khi đày tài.
cân cùa bèn khi dày tài.
Trọng lượng giới hạn
Thường là không giới hạn.
BỊ hạn ché và phụ thuộc cáu trúc trần/ khung
treo cùa phễu cân. Với sự hỏ trọ đằy đũ, hệ
thống treo có thẻ hó trợ một cách an tồn cho
bàn/ phẻu chứa'20 tắn.
Độ nghiêng cùa loadcell
Thiết kế có thể thay đói và phải xem xét độ
Độ nghiêng cùa loadcell sẽ khơng thay đói
võng của sàn, của khung dằm sán có, kích
đáng ké vì các mát trâu và các kết cáu cùa bộ
thước và hình dạng cùa bịn/ phẻu cân và diều
module loadcell Chịu nén có xu hướng dịch
kiện cân do.
chuyên vè đường tâm thặng đứng cho dù
khung đỡ hay dầm đõ có võng hay khơng.
Bảng 1.3: So sánh module loadcell chịu nén và chịu kéo
1.10.3
Nguyên lý hoạt động của loadcell
Thành phần cấu tạo cơ bản của cân điện tử bao gồm hai bộ phần chính. Bộ phận
thứ nhất là đòn cân và bộ phận thứ hai là mạch xử lý tín hiệu điện tử. Địn cân hay gọi tắt
là loadcell (cảm biến tải). Đòn cân được cấu tạo bởi hai thanh phần, thành phần thứ nhất
là “strain gauge” và thành phần còn lại là “load”.
Strain gauge là một điện trở đặc biệt chỉ nhỏ bằng móng tay, có điện trở thay đổi
khi bị nén hay kéo dãn và được nuôi bằng một nguồn điện ổn định, chỉ nhỏ bằng móng
tay, được dán chết lên load, nghĩa là một thanh kim loại chịu tải. Thanh kim loại này một
19
KHĨA LUẬN TỐT NGHIỆP
KHOA CƠNG NGHÊ ĐIỆN
đầu được gắn cố định, đầu còn lại tự do và gắn với mặt bàn cân (đĩa cân).
Khi ta bỏ một khối lượng lên đĩa, thanh kim loại này sẽ bị uốn cong do trọng
lượng của khối lượng cân gây ra. Khi thanh kim loại bị uốn, điện trở strain gauge sẽ bị
kéo dãn ra và thay đổi điện trở. Như vậy, khi đặt vật cân lên bàn cân, tùy theo khối lượng
vật và load, thanh kim loại sẽ bị uốn đi một lượng tương ứng và lượng này sẽ được đo
lường qua sự thay đổi điện trở của strain gauge. Thông thường, thanh kim loại sẽ được
cấu tạo sao cho bất chấp vị trí ta đặt vật cân lên bàn/ đĩa, nó đều cho cùng một mức độ bị
uốn như nhau.
Cấu tạo chính của loadcell gồm các điện trở strain gauges R1, R2, R3, R4 kết nối
thành một cầu điện trở cân bằng (wheatstone) như hình dưới và được dán vào bề mặt của
thân loadcell.
Hình 1.15: Cấu tạo của Loadcell
Một điện áp kích thích được cung cấp cho ngõ vào loadcell (hai góc (1) và (4) của
cầu điện trở wheatstone) và điện áp tín hiệu ra được đo giữa hai góc khác. Tại trạng thái
cân bằng (trạng thái khơng tải), điện áp tín hiệu ra là số không hoặc gần bằng không khi
bốn điện trở được gắn phù hợp về giá trị.
1.11
Encoder
1.11.1
Giới thiệu về encoder
Để đo vị trí của đối tượng ta có nhiều phương pháp với tín hiệu nhận được là tín
hiệu tương tự hay tín hiệu số. Thơng thường, để đo vị trí và vận tốc của động cơ người ta
thường dùng cảm biến encoder. Encoder là để đo lường dịch chuyển thẳng hoặc góc và
chuyển đổi vị trí góc hoặc vị trí thẳng thành tín hiệu nhị phân và nhờ tín hiệu nàychúng ta
có thể xác định được vị trí trục hoặc bàn máy. Tín hiệu ra của encoder thơng thường cho
dưới dạng tín hiệu số.
20
KHĨA LUẬN TỐT NGHIỆP
KHOA CƠNG NGHÊ ĐIỆN
Hình 1.16: Encoder
Cấu tạo của encoder gồm:
Một đĩa quay được khoét lỗ gắn vào trục động cơ
Một đèn led làm nguồn phát sáng và một mắt thu quang điện được bố trí thẳng
hàng
Một mạch khuếch đại tín hiệu
Hình 1.17: Cấu tạo của encoder
1.11.2
Ngun lý hoạt động
Nguyên lý hoạt động cơ bản của encoder đó là một đĩa trịn quay quanh trúc, trên
đĩa có các rãnh. Người ta dùng một đèn led để chiếu lên mặt đĩa, khi đĩa quay, chỗ khơng
có rãnh đèn led khơng chiếu xun qua được, chỗ có rãnh đèn led sẽ chiếu xun qua.
Khi đó, phía mặt bên kia của đĩa, người ta đặt một con mắt thu, với tín hiệu có, hoặc
khơng có ánh sáng chiếu qua, người ta ghi nhận được đèn led có chiếu qua rãnh hay
khơng.
21
KHĨA LUẬN TỐT NGHIỆP
KHOA CƠNG NGHÊ ĐIỆN
Tuy nhiên, để xác định vị trí chính xác hơn của đĩa quay, xác định chiều quay của
đĩa, người ta chia ra trên đĩa làm nhiều rãnh, số rãnh càng nhiều thì độ phân giải của
encoder càng cao. Bên cạnh đó, ngồi tạo ra một vịng rãnh thì người ta làm thêm nhiều
vịng rãnh khác để có thể biết chính xác vị trí của encoder hay chiều quay của nó.
1.11.3
Phân loại
Encoder tuyệt đối sử dụng nguyên tắc cơ bản về bit, căn theo độ phân giải là số bit
tương ứng với số vòng rãnh trên đĩa ta xác định được vị trí hiện tại của đĩa quay ở đâu,
bởi vì tương ứng với một vị trí thì sẽ có một chuỗi nhị phân tương ứng xác định. Mặt
khác tương ứng với việc tăng hay giảm giá trị thì có thể xác định được chiều quay của
encoder.
Trong encoder tuyệt đối người ta thường dùng đĩa mã hóa gray vì hai góc cạnh
nhau chỉ thay đổi 1 bit, cịn với mã nhị phân thì có thể thay đổi cùng lúc gây khó khan và
giảm tốc độ đáp ứng trong q trình xử lý tín hiệu tốc độ cao. Encoder tuyệt đối rất có lợi
trong những trường hợp đối tượng điều khiển địi hỏi vị trí chính xác liên tục của trục
quay bất kể thời điểm nào. Khi đó, việc độ và xử lý encoder tuyệt đối trở nên dễ dàng cho
người thiết kế vì chỉ cần đọc giá trị là có thể biết ngay được vị trí góc của trục quay. Tuy
nhiên, nếu động cơ quay tốc độ cao và nhiều vịng thì điều này khơng có lợi, bởi vì việc
xử lý để đếm số vịng quay của trục mất rất nhiều thời gian.
Ngoài ra, để thiết kế encoder tuyệt đối, chúng ta cần quá nhiều vịng rãnh, trong
khi kích thước của encoder có giới hạn, khó có thể làm nhiều rãnh. Chưa kể rằng việc
thiết kế một dãy led phát và mắt thu cũng bị kích thước của encoder giới hạn rất nhiều.
Điều này được khắc phục bằng encoder tương đối một các đơn giản bởi vì cứ mỗi
lần quay qua một rãnh thì encoder sẽ phát ra một xung tương ứng tăng một đơn vị trong
biến đếm. Tuy nhiên, một vấn đề là làm sao để biết encoder quay hết một vòng, chưa kể
mỗi lần có những rung động, nhiễu nào đó mà ta không quản lý được, encoder sẽ bị sai
một vài xung. Khi đó, nếu hoạt động lâu dài, sai số này sẽ tích lũy. Để khắc phục điều
này, người ta đưa nào thêm một rãnh định vị để đếm số vòng đã quay của encoder. Như
vậy, cho dù có lệch xung, mà encoder đi ngang qua rãnh định vị này, thì ta sẽ biết là
encoder sẽ bị sai xung ở đâu đó.
22
KHĨA LUẬN TỐT NGHIỆP
KHOA CƠNG NGHÊ ĐIỆN
CHƯƠNG 2: CẤU TRÚC MƠ HÌNH CHIẾT RĨT VÀ
ĐĨNG NẮP CHAI
2.1 Bố trí thiết bị trong mơ hình
2.1.1
Sơ đồ bố trí thiết bị
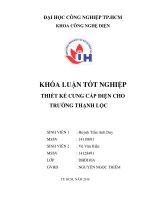
Hình 2.1: Sơ đồ bố trí thiết bị của mơ hình chiết rót và đóng nắp chai
Hình 2.2: Sơ đồ bố trí thiết bị nhìn từ trên cao xuống
23
KHĨA LUẬN TỐT NGHIỆP
KHOA CƠNG NGHÊ ĐIỆN
2.1.2 Sơ đồ đấu dây
Hình 2.3: Sơ đồ đấu dây mơ hình chiết rót và đóng nắp chai
Kí hiệu
S1
Mơ tả
Cảm biến nhận biết chai ở cuối băng tải 1
S2
Cảm biến nhận biết chai ở băng tải 2
S3
Cảm biến nhận biết chai ở vị trí chiết rót
S4
Cảm biến nhận biết chai ở vị trí cấp nắp
S5
Cảm biến nhận biết chai ở vị trí đóng nắp
S6
Cảm biến kiểm tra xem chai được đóng nắp hay chưa
S7
Cảm biến đẩy chai đã được đóng nắp vào kho 2
S8
Cảm biến đẩy chai chưa được đóng nắp vào kho 1
SS1
Cảm biến vị trí xoay của tay gắp
SS2
Cảm biến vị trí lên xuống của tay gắp
SS3
Cảm biến vị trí kẹp cổ chai của tay gắp
SS4
Cảm biến vị trí giữ chai ở vị trí cấp nắp
SS5
Cảm biến vị trí lên xuống của bộ phận cấp nắp
SS6
Cảm biến vị trí xoay của bộ phận cấp nắp
24
KHĨA LUẬN TỐT NGHIỆP
KHOA CƠNG NGHÊ ĐIỆN
SS7
Cảm biến vị trí giữ chai ở vị trí đóng nắp
SS8
Cảm biến vị trí lên xuống của bộ phận đóng nắp
SS9
x
SS10
x
SS11
SOL1
x
VAN XOAY của tay gấp
SOL2
Van lên xuống của tay gấp
SOL3
Van kẹp cổ chai của tay gấp
SOL4
SOL5
x
Van lên xuống của bộ phận cấp nắp
SOL6
Van giữ nắp của bộ phận cấp nắp
SOL7
SOL8
x
Van lên xuống của bộ phận đóng nắp
SOL9
Van đẩy chai của xi lanh đơi
SOL10
Van giữ chai ở vị trí cấp nắp
SOL11
SOL12
x
Van chiết rót
SOL13
SOL14
x
Van giữ chai ở vị trí đóng nắp
SOL15
x
25